Известно устройство для программированного вращения вала (осн. авт. св. №164780), содержащее сельсинный привод, редуктор, генератор импульсов, связанный через редуктор с импульсным индикатором, выполненным, например, в виде постоянного магнита и трех электромагнитных головок, одна из которых установлена неподвижно, вторая - на выходном валу сельсинного привода, а третья - на ведомом валу.
Предлагаемое устройство отличается от известного тем, что в нем магнитная головка, закрепленная на выходном валу, установлена параллельно плоскости вращения постоянного магнита, имеющего три острые грани, обращенные соответственно к магнитным головкам, расположенным на входном и выходном валах и корпусе устройства, что повышает точность контроля вращения вала.
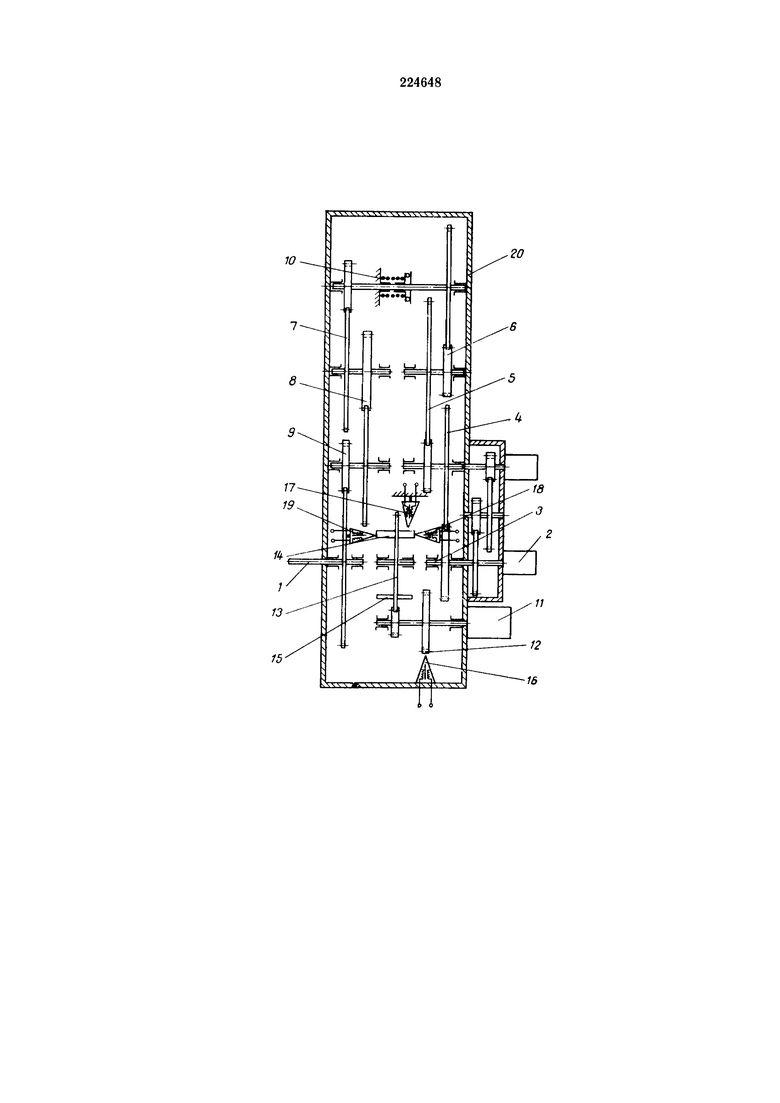
На чертеже показано предлагаемое устройство.
Вращение выходного вала 1 осуществляется от сельсинного привода 2, позволяющего поворот входного вала 3 осуществлять с точностью до 12 угловых минут, и редуктора, состоящего из зубчатых пар 4 (i1=3), 5 (i2=4), 6 (i3=4), 7 (i4=5), 8 (i5=5) и 9 (i6=6). Все зубчатые пары выполнены по высокому классу точности с осевыми люфтами, выбранными с помощью пружинных компенсаторов 10 (на чертеже условно показан один компенсатор). Контроль за вращением входного 3 и выходного 1 валов производится импульсным устройством, включающим электродвигатель 11 типа ДИД-2ТА, вращающий импульсный диск 12. Последний изготавливается из электротехнической стали, имеет 360 прямоугольных пазов, расположенных равномерно по наружному диаметру. Посредством зубчатой пары 13 (i7=5) вращается постоянный магнит 14 с тремя острыми гранями. Зубчатое колесо в этой паре сбалансировано противовесом 15 из немагнитного материала. Постоянный магнит 14 и импульсный диск 12 вращается относительно ферритовых магнитных головок 16, 17, 18 и 19 на 150 кгц с рабочим зазором, равным 1 мк. Магнитные головки 16 и 17 жестко закреплены на корпусе 20, магнитная головка 18 - на входном валу 3, а головка 19 - на выходном валу 1. Корпус 20, в котором закреплены импульсное устройство, зубчатый редуктор, сельсинный привод и электродвигатель типа ДИД-2А, выполнен в пылезащищенном исполнении.
Работает устройство следующим образом.
При включении электродвигателя 11 начинает вращаться импульсный диск 12 и постоянный магнит 14, которые, проходя мимо магнитных головок 16, 17, 18 и 19, создают в последних импульсные сигналы. Каждый выступ импульсного диска 12, проходя относительно магнитной головки 16, создает непрерывную строчку из импульсов. Постоянный магнит 14, проходя своей острой гранью относительно магнитной головки 17, создает импульсный сигнал, открывающий счет импульсов в строчке, а проходя двумя другими острыми гранями относительно магнитных головок 18 и 19, создает сигналы, закрывающие счет импульсов в этой строчке.
При одновременном вращении импульсного диска 12, постоянного магнита 14 и магнитных головок 18 и 19 последние отсекают пачки импульсов от 1 до 1860. Пачка в 1860 импульсов, отсекаемая одной из этих магнитных головок, соответствует полному обороту последней, при повторных оборотах пачки импульсов суммируются. Так как между входным 3 и выходным 1 валами редуктора вращение осуществляется с передаточным отношением iред=7200, то при отсекании магнитной головкой 19 пачек импульсов от 1 до 1800, магнитная головка 18 отсечет соответственно пачки импульсов 7200±Δ1; 14400±Δ2; 21600±Δ3; … 12960000±Δ1800, где Δ1, Δ2, Δ3 … Δ1800 - погрешности, характеризующие неточность изготовления зубчатого редуктора и импульсного устройства.
Вращение выходного вала 1 с точностью до 0,1 связано с тарировкой, которую производят с помощью импульсного устройства в следующем порядке: устанавливают входной 3 и выходной 1 валы редуктора в положение, при котором импульсные сигналы с магнитных головок 17, 18 и 19 возникают одновременно. Поворачивают выходной вал 1 с магнитной головкой 19 до отсекания первого импульса и определяют при этом с точностью до одного импульса пачку, отсекаемую магнитной головкой 18. Это положение магнитной головки 19 принимают за начальное положение для тарировочных работ.
Тарировку устройства начинают с определения люфтов редуктора в начальном положении, для чего поворачивают в обратном направлении магнитную головку 19 до пропадания первого импульса и определяют, какую пачку отсечет при этом магнитная головка 18. Зная люфт в передаче при начальном положении, вновь поворачивают магнитную головку 19 до появления первого импульса, а затем пачку, отсекаемую магнитной головкой 18, последовательно увеличивают на 1, 2, 3, 4 и т.д. импульсов.
При этих новых положениях вала 3 выходной вал редуктора при кинематически точной передаче вращения будет соответственно поворачиваться на угол 0,1; 0,2; 0,3; 0,4 и т.д. угловых секунд.
Дальнейшая тарировка сводится к определению пачек импульсов, которые отсечет магнитная головка 18 при повороте выходного вала 1 на угол 0,1; 0,2; 0,3; 0,4 и т.д. угловых секунд. Таким образом проводят тарировку угловых поворотов выходного вала с точностью до 0,1 угловой секунды в диапазоне от начального положения до появления второго импульса, отсекаемого магнитной головкой 19. Это положение вала 1 принимают за начальное и повторяют процесс тарировки до появления третьего импульса. С появлением каждого нового импульса в пачке, отсекаемой магнитной головкой 19, принимают его за начальное положение и повторяют аналогично описанному процесс тарировки. Далее тарируют полный оборот вала 1, соответствующий отсекаемой магнитной головкой 19 пачке в 1800 импульсов. Вся импульсная информация с магнитных головок 16, 17, 18 и 19 поступает в счетно-решающие устройства, где соответствующим образом обрабатывается.
Предлагаемая конструкция устройства для программированного вращения вала будет использована для высокоточных поворотных платформ.
Устройство для программированного вращения вала по авт. св. №164780, отличающееся тем, что, с целью повышения точности, магнитная головка, закрепленная на выходном валу, установлена параллельно плоскости вращения постоянного магнита, имеющего три острые грани, обращенные соответственно к магнитным головкам, расположенным на входном и выходном валах и корпусе устройства.
