По основному авт. ов. № 164780 известно устройство для программироваиного вращения вала, содержащее сельсивный привод, связанный с ним через редуктор импульсный индикатор, выполяенный в виде постоянного магнита и трех электромагнитных головок, одна из которых установлена на выходном валу, и червячную лередачу, взаимодействующую с осью сельсина.
Изобретение расширяет область применения ooHOiBHoro изобретения, позволяя повысить точность вращения вала.
Это достигается тем, что вал червячного колеса выполнен в виде ходового винта, несущего зубчатую рейку, взаимодействующую с разрезной шестерней, установленной на выходном Валу импульсного индикатора, а червячное колесо имеет резьбовое отверст1ие, через которое проходит указанный винт.
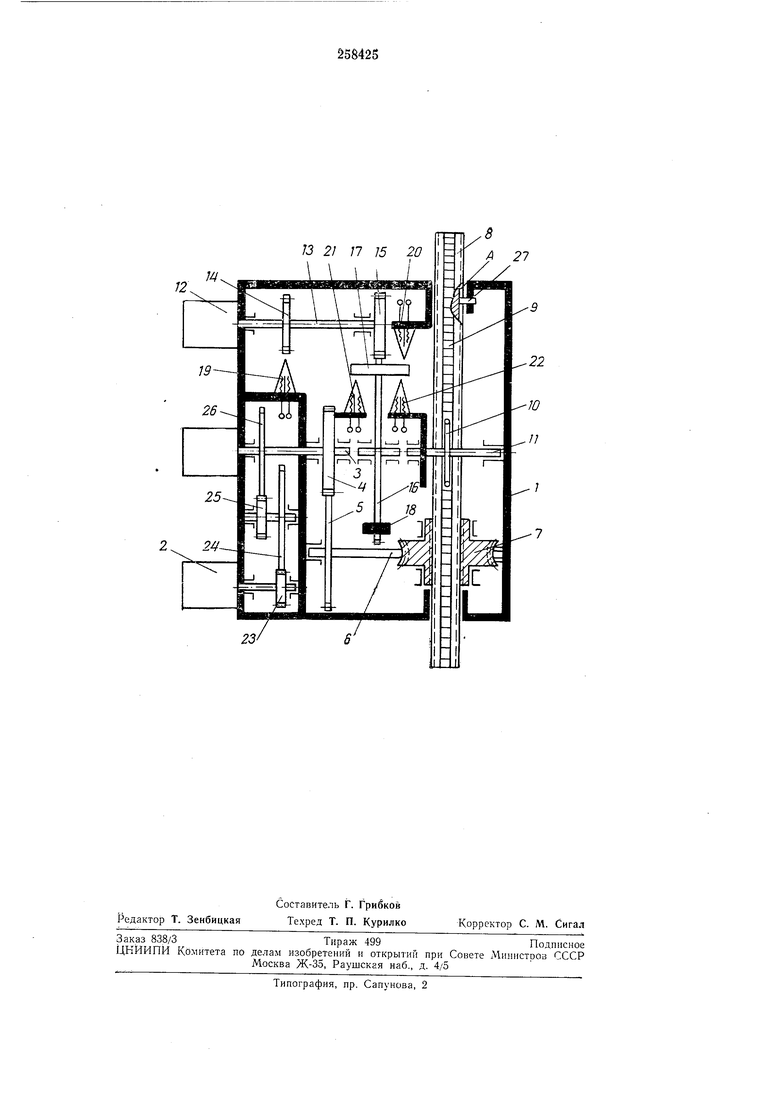
На чертеже изображена схема описываемого устройства.
В устройство входят установленные в корПусе / сельсинный при(вод 2 и импульсный инцИКатар, содержащий входной вал 3, который через щестерни 4 т 5 связан с червяком 6, а червяк 6 - с червячным колесом 7, установленным на валу, вьгполненном в виде ходового винта 8, несущего зубчатую рейку Р. Червячное колесо 7 имеет резьбовое отверстие, через которое П|роходит винт 8. Зубчатая рейка 9 взаимодействует с шестерней 10, установленной на выходном валу //, которая выполнена разрезной для выбора люфтов. Шестерни 4 -я 5, червяк 6, червячное колесо 7, винт 8,
рейка 9 и шестерня 10 образуют кинематическую цепь между валами 3 и //.
Кроме того, импульсный индикатор содержит электродвигатель 12, на валу 13 которого установлены диск 14 из электротехнической
стали, имеющий равномерно расположенные по наружному диаметру 360 пазов (на чертеже не показаны), и зубчатое колесо 15, находящееся в зацеплении с гиестерней 16. На шестерне 16 диаметрально противоположно установлены постоянный магнит 17. имеющий три грани (на чертеже не показаны), и противовес /5 из немагнитного материала, для балансировюи шестерни 16. Импульсный индикатор снабжен также магнитными головками 19, 20,
21 и 22. Головка 19 установлена на корпусе / в плоскости диска 14, головка 20 установлена на -корпусе 1 в зоне расположения щестерни 16, а головки 21 и 22 установлены соответственно на входном ва.ту 3 и выходном валу //
импульсного индикатора.
Сельсинный привод 2 связан с входным валом 3 импульсного индикатора при помощи редуктора с шестернями 23, 24, 25 и 26. Ходовой, винт 8 имеет продольный паз А, в
штифт 27, благодаря чему ходовой винт 8 может совершать только возвратно-поступательное нрямолинейное перемеш.ение.
УстроЙ1СТБО работает следующим образам.
При включении электродвигателя 12 начинают в:раш,аться диок М и постоянный магнит, которые, пбремеш;ая1сь относительно магнитных головок 19, 20, 21 и 22, создают импульсные сигналы в последних, причем диск 14 создает непрерывную строчку импульсов, а постоя пный магнит, проходя ювоей острой гранью мимо магнитной головки 20, создает импульсный сигнал, открывающий счет импульсов в этой строчке, друпие две острые грани магнита при прохождении мимо магнитных головок 21 и 22 создают электромагнитные сигналы, закрывающие счет импульсов.
При одновременном вращении диска 14, постоянного магнита и магнитных голо:вО:К 21 и 22, последние отсекают серию импульсов от 1 до 1800. Серия в 1800 импульсов, отсекаемая одной из этих головок, соответствует нолному обороту ее, при повторных оборотах серии импульсов суммируются.
Так как входной 5 и выходной 11 валы импульсного индикатора вращаются с передаточным отношением, например 7200: 1, то при отсекании магнитной головкой 21 серии импульсов от 1 до 1800 магнитная голавка 22 отсечет соответственно 7200±Ai; 14400+АЗ; 21600±Аз, ... 12960000±Ai8oo , где Аь Аа; АЗ, ... AISOO - погрешности, характеризующие неточность изготовления кинематической цепи.
Вращение вала 11, а следовательно, и шестерни 10 с точпостью до 0,1 угловой секунды при отношении радиуса закрепления магнитной головки 20 к радиусу шестерни 10, как 5:1, будет соответствовать линейпОМу перемещению винта 8 на 0,1 мк. Так как имеются люфты и кинематические неточности в передаче движения ходовому винту 8, устройство необходимо тарировать, определяя угловые повороты выходного вала 11, а следовательно, и шестерни 10 с точностью до 0,1 угловой секунды с помощью импульсного индикатора.
Тарировать устройство можно в следующем порядке.
Устанавливают входной 5 и выходной валы 11 импульсного индикатора в положение, при котором импульсные сигналы с магнитных головок 20, 21 и 22 возникают одновременно. Поворачивают выходной вал 11 с магнитной головкой 22 до отсекания первого импульса и определяют при этом с точностью до одного импульса серию, отсекаемую магнитной головкой 21. Это положение магнитной головки 22 принимают за исходное для тарир:овочных работ.
Тарировку устройства начинают с определения люфтов кинематической цапи в начальном положении, для чего поворачивают в обратном направлении магнитную головку 22 до
исчезновения первого импульса, и определяют, какую серию импульсов отсечет при этом магнитная головка 21. Последняя будет характеризовать величину люфта кинематической цепи. Зная люфт в кинематической цапи при начальном положении, вновь поворачивают магнитную головку 22 до появления первого импульса, а затем серию импульсов, отсекаемую магнитной головкой 21, последовательно увеличивают на 1,2,3,4 и более импульсов.
При этих новых положениях вала 3 выходной вал // при точной кинематической цепи будет соответственно поворачиваться на угол в 0,1, 0,2, 0,3, 0,4 и более угловых секунд от начального положения.
В реальном устройстве поворот вала 11 на углы в 0,1, 0,2, 0,3, 0,4 и более угловых секунд произойдет, если серии импульсов, отсекаемые магнитной головкой 21, при обратном вращении вала 11 до исчезновения первого импульса будут соответственно возрастать на 1,2,3,4 и более импульсов по сравнению с серией, характеризующей люфт в начальном положении. Дальнейшая тарировка устройства сводится к определению серии импульсов, которые отсекает магнитная головка 21 при повороте выходного вала 11 на угол в 0,1, 0,2, 0,3, 0,4 и более угловых секунд. Таким образам проводят тарировку угловых поворотов выходного вала 11 с точностью до 0,1 угловой секунды в
диапазоне от начального положения до появления второго и.мпульса, .отсекаемого магнитной головкой 22. Принимают это положение вала // за начальное и повторяют процесс тарировки до появления третьего импульса.
С появлением каждого нового импульса в серии, отсекаемой магнитной головкой 22, принимают его за начальное и повторяют процесс тарировки, описанный выше до тарировки полного оборота вала 11.
Вся импульсная инфор 1ация поступает в счетно-решающее устройство (на чертеже не показано) для соответствующей обработки.
Предмет и з о б р е т е iH и я
Устройство для програмимираванного вращения вала по авт. св. N° 164780, отличающееся тем, что, с целью повышения точности, вал червячного колеса выполнен в виде ходового винта, несущего зубчатую рейку, взаи-модействующую с разрезной шестерней, установленной на выходном валу импульсного индикатора, а червячное колесо имеет резьбое отверстие, через которое проходит указанный винт.
13 21 77 15 20 -- А 21
12
23
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММИРОВАННОГО ВРАЩЕНИЯ ВАЛА | 1967 |
|
SU224648A2 |
| ПРЕЦИЗИОННОЕ СИЛОВОЕ УСТРОЙСТВО ДЛЯ ПРЯМОЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1970 |
|
SU276213A1 |
| ПРИВОДНОЕ УСТРОЙСТВО | 1973 |
|
SU375635A1 |
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Плансуппортная расточная головка | 1989 |
|
SU1748961A1 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| Шурупозаворачивающий многошпиндельный станок | 1986 |
|
SU1509241A1 |
| Рулевой привод | 2024 |
|
RU2826230C1 |