Предлагаемое изобретение касается станков для лечебных и спортивных целей н назначается для индивидуальной или групповой тренировки сердца, легких и всего организма через посредство принудительного движения с предписанной скоростью по платформе станка, которая при помощи каната, барабана и снстемы червячных передач может изменять края наклона по отношению к горизонту. Принудительное передвижение человека вдоль площадки со скоростью равной и противоположной скорости движения самой площадки достигается наличием барьера, укрепленного неподвижно или подвижно на площадке и препятствующей человеку передвигаться вместе с площадкой.
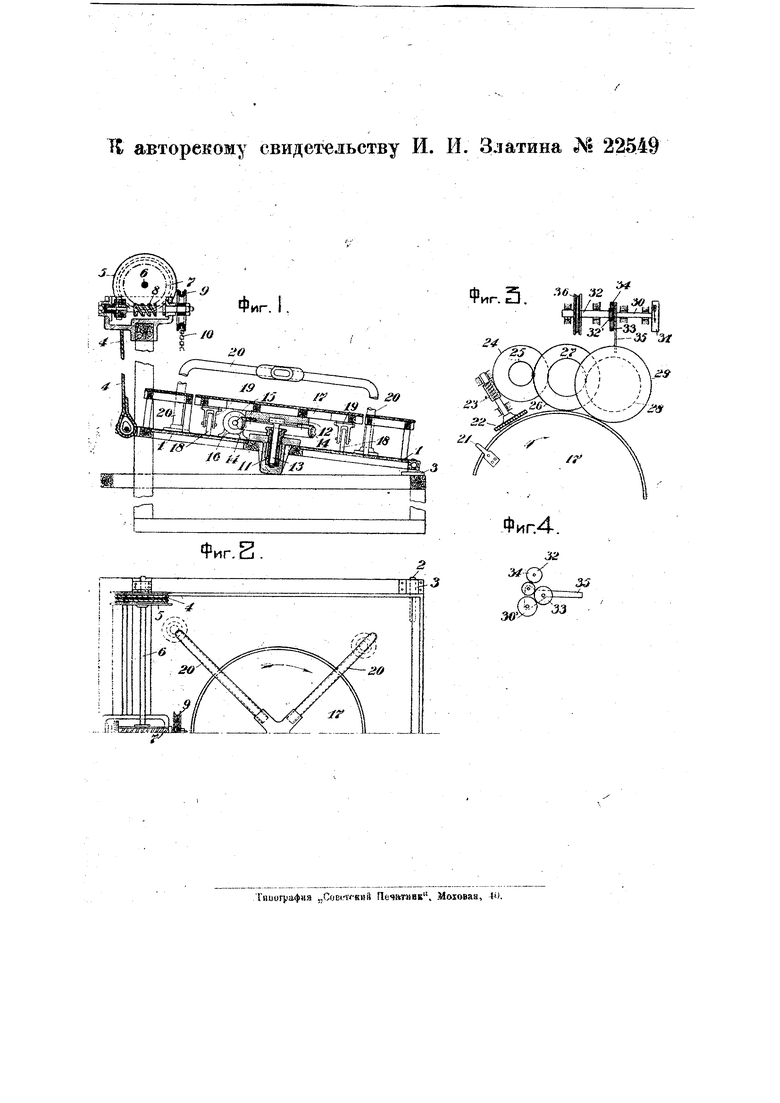
На схематическом чертеже фиг. 1 изображаЪт станок для лечебных и спортивных целей в разрезе; фиг. 2-вид половины с ганка в плане; фиг. 3 - соединения платформы через распределительный барабан, качающий рычаг и системы передач с тяговым колесом и фиг. 4- качающийся рычаг для передачи движения от распределительного барабана.
Указанный станок для лечебных и cnojpтивных целей состоит из площадки 1, могущей поворачиваться вокруг оси 2 (фнг, 1 к 2) л подшипниках 3. Опираясь с одного конца на подшипннки 3, платформа 1 с другого конца поддерживается через посредство тросов 4, намотанных яа барабаны 5, наглухо закрепленные на валу 6, на котором, также наглухо насажено червячное колесо 7, каковое может приводиться в движение червяком 8 через посредство тягового колеса 9 и-цепи 10. Вал червяка 8 снабжен одним нз известных в технике автоматических тормозов (на фиг. 1 изображен тормоз Людерса). Поворачивая тяговое колесо 9 через посредство цепи 10 в ту или иную сторону, тем самым наматываются на барабаны 5 или сматываются с барабанов 5 тросы 4, отчего наклон платформы 1 увеличивается или уменьшается. Благодаря наличию автоматического тормоза на оси червяка 8, платформа не может самостоятельно менять своего наклона.
На платформе 1 покоится поворотный круг 12 через посредство вг1ла 13, вращающегося в подшипнике И, укрепленном на платформе 1. Круг 12 наглухо закреплен на валу 13 одним из известных способов. К кругу 12 прикреплено червячное колесо 14, которое приводится в движение через посредство червяка 15 от электромотора 16 или от другого источника движения. На круге 12 покоится и соответствующим образом залрепАяется платформа 17. Для большей устойчивости и плавности движения при неравномерной нагрузке, платформа 17 может иметь определенное количество добавочных опор в виде колес 18, вращающихся в подшиппниках 19, прикрепленных к платформе 17.
На определенной высоте над верхней поверхностью платформы. 17 располатается барьер 20, неподвижно прикрепленный к площадке 1 и расположенный по радиусам круглЬй поворотной платформы 17.
Тренирующийся человек, находясь на платформе 17 лицом по направлению, обратному направлению движения платформы 17, держится руками за барьер 20. При вращении платформы 17, установ-ленной на определенный угол наклон.а, последняя будет уносить ноги человека по направлению своего движения, и человек для сохранения равновесия принужден будет двигаться по направлению, обратному движению платформы 17, со скоростью, которая будет зависеть от угловой скорости платформы 17 и расстояния человека от центра платформы.. Плоскость симметрии, проходящая через центр Т1латформы 17 и перпендикулярная к оси 2 поворота платформы, делит платформу 17 на две половины, которые отличаются тем) что на одной половине движение человека может происходить по восходящему наклону, а на другой половине по нисходящему наклону.
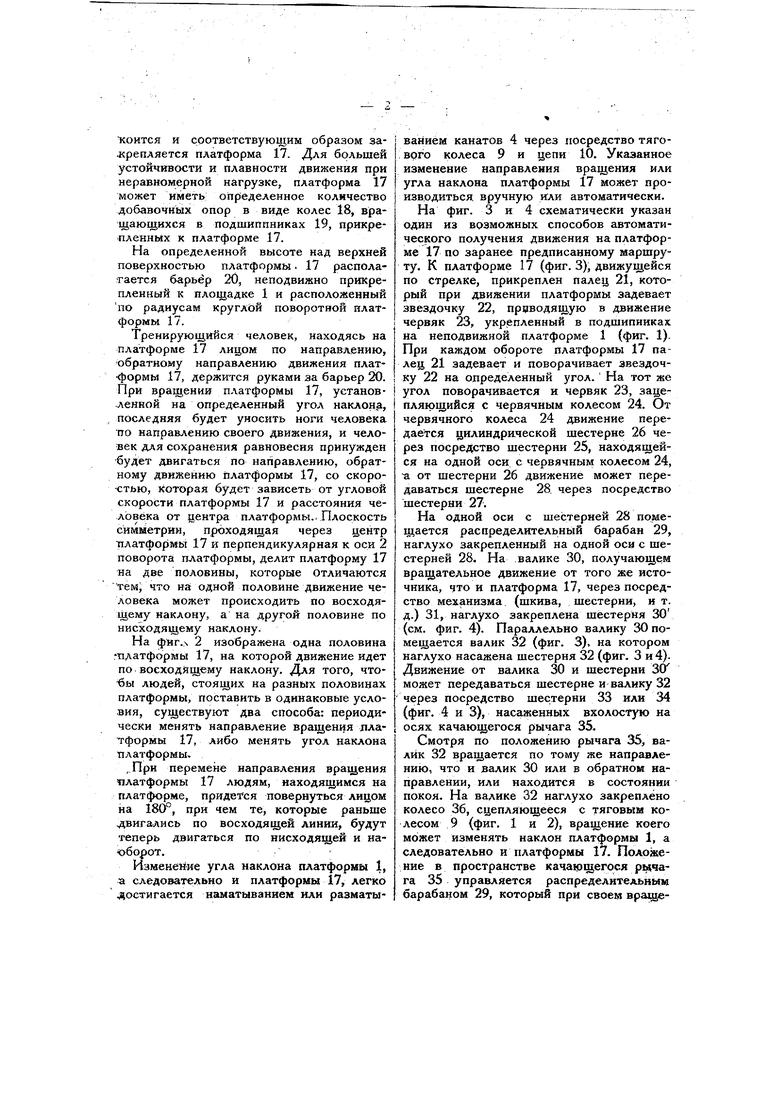
На фиг.л 2 изображена одна половина платформы 17, на которой движение идет по восходящему наклону. Для того, чтобы людей, стоящих на разных половинах платформы, поставить в одинаковые условия, существуют два способа: периодически менять направление вращения ллатформы 17, либо менять угол наклона платформы,
,.Прн перемене направления вращения платформы 17 людям, находящимся на платформе, придется повернуться лицом на 180°, при чем те, которые раньше двигались по восходящей линии, будут теперь двигаться по нисходящей и наоборот.
Изменение угла наклона платформы 1, а следовательно и платформы 17, легко достигается наматыванием или разматыванием канатов 4 через посредство тягового колеса 9 и цепи 10. Указанное изменение направления вращения или угла наклона платформы 17 может производиться вручную или автоматически.
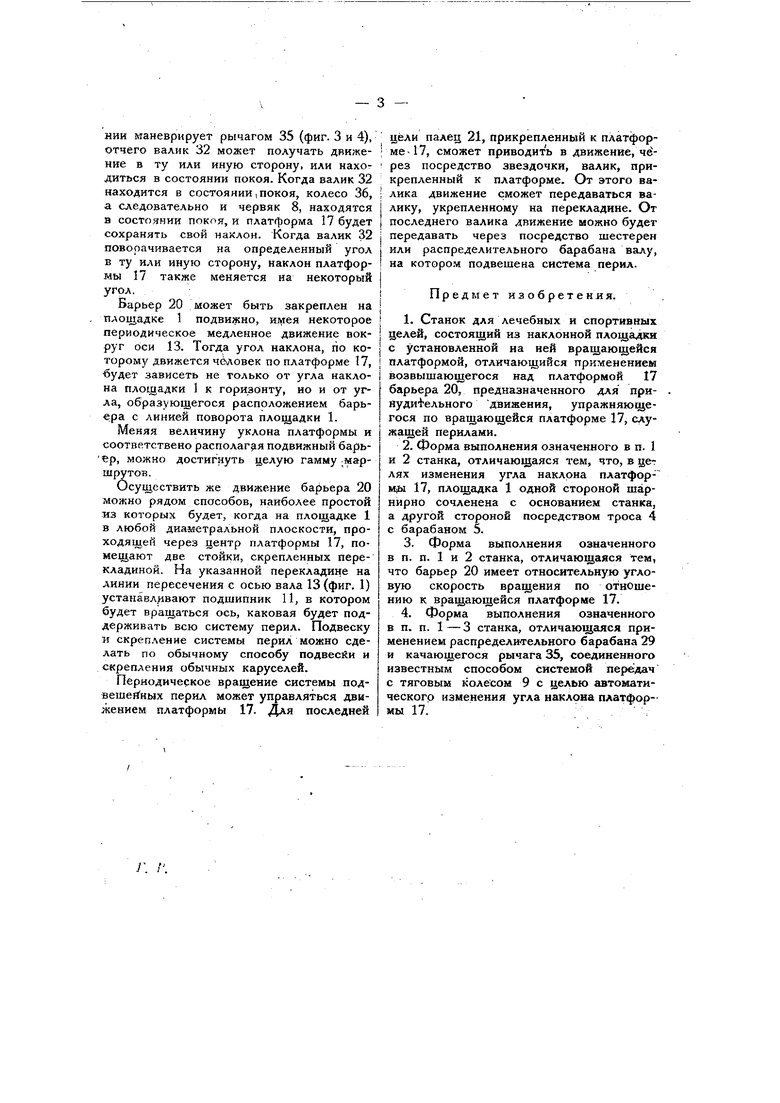
На фиг. 3 и 4 схематически указан один из возможных способов автоматического получения движения на платформе 17 по заранее предписанному маршруту, К платформе 17 (фиг. 3), движущейся по стрелке, прикреплен палец 21, который при движении платформы задевает звездочку 22, првводящую в движение червяк 23, укрепленный в подшипниках на неподвижной платформе 1 {фиг. 1). При каждом обороте платформы 17 палец 21 задевает и поворачивает звездочку 22 на определенный угол. На тот же угол поворачивается и червяк 23, зацепляющийся с червячным колесом 24. От червячного колеса 24 движение передается цилиндрической шестерне 26 через посредство шестерни 25, находящейся на одной оси с червячным колесом 24, -а от шестерни 26 движение может передаваться шестерне 28, через посредство шестерни 27.
На одной оси с шестерней 28 помещается распределительный барабан 29, наглухо закрепленный на одной оси с шестерней 28. На .валике 30, получающем вращательное движение от того же источника, что и платформа 17, через посредство механизма. (шкива, шестерни, и т. д.) 31, наглухо закреплена шестерня 30 (см. фиг. 4). Параллельно валику 30 помещается валик 32 (фиг. 3), на котором наглухо насажена шестерня 32 (фиг. 3 и 4). Движение от валика 30 и шестерни 30 может передаваться шестерне и валику 32 через посредство шестерни 33 или 34 (фиг. 4 и 3), насаженных вхолостую иа осях качающегося рычага 35.
Смотря по положению рычага 35, валик 32 вращается по тому же направлению, что и валик 30 или в обратном направлении, или находится в состоянии покоя. На валике 32 наглухо закреплено колесо 36, сцепляющееся с тяговым колесом 9 (фиг, 1 и 2), вращение коего может изменять наклон платформы 1, а следовательно и платформы 17. Положение в пространстве кача10щегося pi qaга 35 управляется распределительным барабаном 29, который при своем apaiyeНИИ маневрирует рычагом 35 (фиг. 3 и 4), отчего валик 32 может получать движение в ту или иную сторону, или находиться в состоянии покоя. Когда валик 32 находится в состоянии,покоя, колесо 36, а следовательно и червяк 8, находятся в состоянии покоя, и платформа 17 будет сохранять свой наклон. Когда валик 32 поворачивается на определенный угол в ту или иную сторону, наклон платформы 17 также меняется на некоторый угол.
Барьер 20 может быть закреплен на площадке 1 подвижно, некоторое периодическое медленное движение вокруг оси 13. Тогда угол наклона, по которому движется человек по платформе 17, будет зависеть не только от угла наклона площадки 1 к горизонту, но и от угла, образующегося расположением барьера с линией поворота площадки 1.
Меняя величину уклона платформы и соответствено располагая подвижный барьер, можно достигнуть целую гамму ;маршрутов.
Осуществить же движение барьера 20 можно рядом способов, наиболее простой из которых будет, когда на площадке 1 в любой диаметральной плоскости, проходящей через центр платформы 17, помещают две стойки, скрепленных перекладиной. На указанной перекладине на линии пересечения с осью вала 13 (фиг. 1) ycтaнaвл Iвaют подшипник 11, в котором будет вращаться ось, каковая будет поддерживать всю систему перил. Подвеску и скрепление системы перил можно сделать по обычному способу подвески и скрепления обычных каруселей.
Периодическое вращение системы подвешеяных перил может управляться движением платформы 17. Для последней
цели палец 21, прикрепленный к платформе-17, сможет приводить в движение, через посредство звездочки, валик, прикрепленный к платформе. От этого валика движение сможет передаваться валику, укрепленному на перекладине. От последнего валика движение можно будет передавать через посредство шестерен или распределительного барабана валу, на котором подвешена система перил.
Предмет изобрете ни я.
1.Станок для лечебных и спортивных целей, состоящий из наклонной площадки с установленной на ней вращающейся платформой, отличающийся применением возвышающегося над платформой 17 барьера 20, предназначенного для принуди ельного движения, упражняющегося по вращающейся платформе 17, служащей перилами.
2.Форма выполнения означенного в п. 1 и 2 станка, отличающаяся тем, что, в цег лях изменения угла наклона платфорM i 17, площадка 1 одной стороной шарнирно сочленена с основанием станка, а другой стороной посредством троса 4 с барабаном 5.
3.Форма выполнения означенного в п. п. 1 и 2 станка, отличающаяся тем, что барьер 20 имеет относительную угловую скорость вращения по отношению к вращающейся платформе 17.
4.Форма выполнения означенного в п. п. 1 - 3 станка, отличающаяся применением распределительного барабана 29 и качающегося рычага 35, соединенного известным способом системой передач с тяговым колесом 9 с целью автоматического изменения угла наклона платформы , , ;
Фиг.4.
Фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Духовой шкаф | 1927 |
|
SU17683A1 |
| Приспособление для затяжки канатов на барабанах в подъемных механизмах | 1929 |
|
SU17673A1 |
| Автомат для изготовления иголок Миллера | 1929 |
|
SU27369A1 |
| Приспособление для автоматической установки резца в рабочее положение на станках с копирным резьбонарезным приспособлением | 1945 |
|
SU68304A1 |
| Устройство для выгрузки кирпича из гофманской печи | 1938 |
|
SU55604A1 |
| Приспособление для обогревания духового шкафа горелкою типа "Примус" | 1925 |
|
SU13000A1 |
| Станок для правки стержней | 1937 |
|
SU53305A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАСТИЛКИ ВАЛЕНОГО САПОГА | 1931 |
|
SU36021A1 |
| Приспособление для выгрузки обожженной извести и т.п. материалов из шахтной печи | 1931 |
|
SU30205A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ПРИВОДА ЗАТЯЖНЫХ МАШИН | 1927 |
|
SU20488A1 |