Предлагаемое устройствб Отличается feMj что каждый элемент дифференциального индукционн1эго датчика выполнен трехобмОточHbijM. Это позволяет повУеить точность ориентации трактора. Кроме Toroj для повын1ёния помехоустойчивости на несущей частоте йве Дена дополнительная модуляция тока в Шиалерной линии, а в схему устройства включены избирательные усилители. Для повышения точности Движения путем учета угловой скорости поворота введена внутренняя отрицательная обратная связь, передающая сигнал разности скоростей вращения щестерен бортовых передач от установленных в их картерах магнитоиндукционных датчиков на управляемые перемеппые резисторрл, изменяющие чувствительность правого и левого каналов управления.
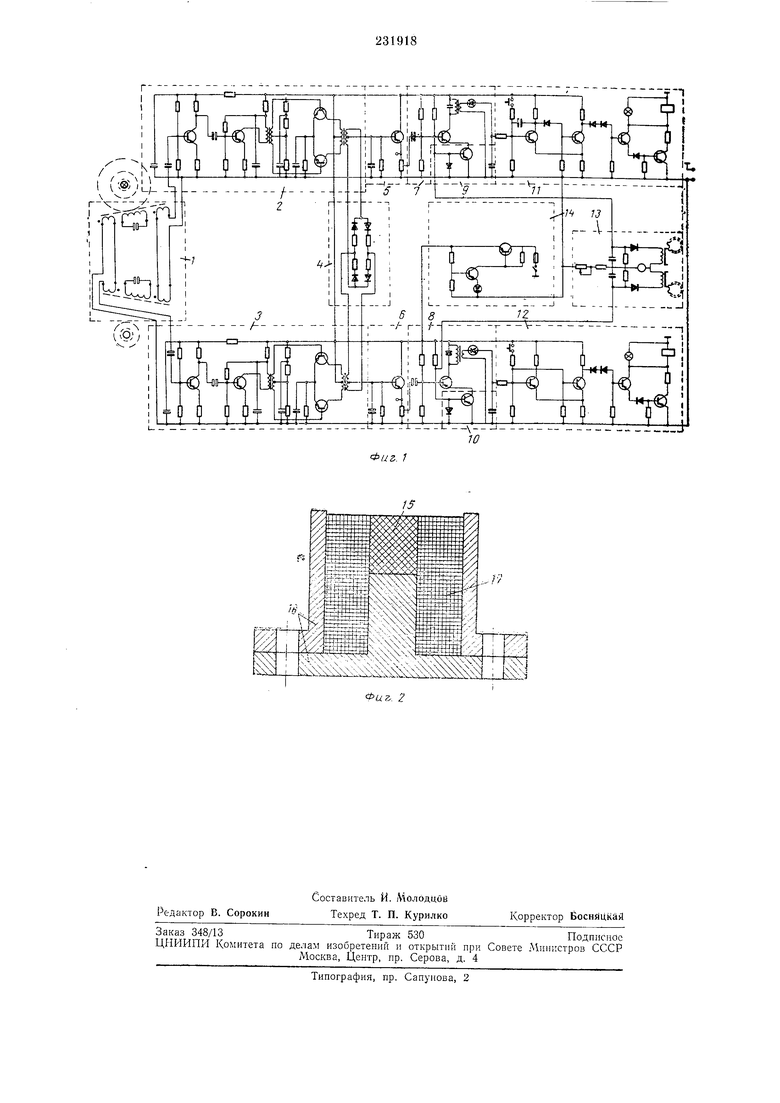
На фиг. 1 изображена принципиальная электрическая схема описываемого устройства; на фиг. 2 - конструкция магнитоиндукциоиного датчика.
Устройство состоит из дифференциального индукционного датчика 1, сигнального усилителя 2, опорного усилителя 3, фазового детектора 4, эмиттерных повторителей 5 и 5, резонансных усилителей 7 и 5, переменных полупроводниковых резисторов 9 и 10, электронных реле // и 12, датчиков обратной связи 13 и стабилизатора напряжения 14.
lidpoucTBo работает следующим образом, Электромагнитное поле бриентацйи Наводит э.д.с, в обмотках индукционного Датчики /j на строенных в резонанс е частотой тика в линии; Разиостный сигнал, снимаемый е послё довательно-встречно соединенных вторичных обмоток датчика, характеризует г1оложён 1ё трактора относительно средней линии и мел дуряДья виноградника; с последовательносогласно соединенных облготок снимается сигнал опорной фазы, стабильнЕзп по амплитуде. Эти сигналы подаются на двухкаиальиый амплитудно-фазовый преобразователь, состоящий из сигнального усилителя 2, оиорного усилителя 3 и фазового детектора 4.
Величина и знак напряжения на выходе фазового детектора соответствуют величине и направлеиию отклонения трактора от средней линии междурядья. Это напряжение подается на эмиттерные повторители 5 п 6 иравого и левого каналов управления гусеничным трактором, сигнал с которых поступает на резонансные усилители 7, 5, коэффициент усиления которых изменяется в зависимости от величины сигнала внутренней отрицательной обратной связи, регулируемой переменными резисторами 9 и 10 и работающей на основе использования информации об угловой скорости поворота трактора. С усил 1телей сигнал поступает на электронные реле 11 12, включающие э„1ектромагниты двухпозиционпых электрогидравлических сервомеханизмов управления муфтами поворота трактора.
В качестве преобразователей угловой скорости поворота в электрический сигнал используются специальные магнитоиндукционные датчики 13 с модуляцией магнитного потока, осуществляемой зубцами вращающихся шестерен бортового редуктора трактора. Датчики состоят из ностоянного магнита 15, корпуса 16, являющегося магнитопроводом, и катушки 17.
Предмет изобретения
1. Устройство для автоматического направления движения трактора, основанное на ориентации в искусственном электромагнитном поле слабых переменных токов, пропускаемых по шпалерным проводам, содержащее дифференциальный двухэлементный индукционный датчик, двухканальный амплитуднофазовый преобразователь и два полупроводниковых реле, управляющих электрогидравлическими сервоприводами муфт поворота, отличающееся тем, что, с целью повышения точности ориентации, каждый элемент дифференциального индукционного датчика выполнен трехобмоточным.
2.Устройство по п. 1, отличающееся тем, что, с целью повышения номехоустойчнвости на несущей частоте, введена дополнительная
модуляция тока в шналерной линии, а в схему устройства включены избирательные усилители.
3.Устройство по нн. 1 и 2, отличающееся тем, что, с целью повышения точности движения путем учета угловой скорости поворота, введена внутренняя отрицательная обратная связь, нередающая сигнал разности скоростей вращения шестерен бортовых передач от установленных в их картерах магнитоиндукционных датчиков на унравляемые переменные резисторы, изменяющие чувствительность правого и левого каналов управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ | 1970 |
|
SU276567A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1969 |
|
SU232636A1 |
| Стабилизатор бортовой и килевой качки глиссера с носовым крылом и закрылками | 1973 |
|
SU495229A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕЛ\А УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПОВОРОТА ТРАКТОРА | 1970 |
|
SU270366A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ИЗМЕРИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫХ ИСКАЖЕНИЙ СИГНАЛОВ ЦВЕТНОГО ТЕЛЕВИДЕНИЯ | 1969 |
|
SU257561A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |