Механическая рука относится к устройствам, предназначенным для выполнения транспортных, технологических и монтажных операций.
Известные устройства имеют исполнительный механизм, представляющий собой шарнирный многозвенник, на конечном звене которого установлены рабочий орган и приводы ,для перемещения звеньев, а также механизмы управления этими приводами.
Сложность управления перемещением рабо-чего органа по необходимой траектории затрудняет выполнение транспортных, технологических и монтажных работ.
Для упрощения управления предлагаемая механическая рука выполнена как исполнительный механизм, представляющий собой управляемый шарнирный многозвенник, с рабочим органом на конце, в котором, согласно изобретению, имеется аналоговый механизм исполнительного механизма, уменьшенный в заданном масштабе и механизм управления многозвенником, который связан с аналоговым механизмом следящими приводами, работающими по принципу астатического регулирования.
Аналоговый механизм содержит дифференциальный механизм, расположенный на конечном его звене и обеспечивающий заданлую ориентацию рабочему органу механической руки. Аналоговый механизм выполнен с учетом двух вариантов управления им: модулятором и бустером. Для ручного управления аналоговым механизмом на его последнем звене установлена рукоятка-модулятор.
Для механизированного управления аналоговым механизмом в нем смонтированы электродвигатели, а вне его- орган,, управляющий электродвигателями, бустер.
Орган, управляющий электродвигателями аналогового механизма представляет собой смонтированные в дистанционно расположенной рукоятке-бустере индукционные фазочувствительные потенциометры, число которых равно числу электродвигателей на аналоговом механизме. В качестве управляющего органа может быть использована магнитная лента с записью заданной программы работы механической руки, сигналы с которой через усилители поступают на соответствующие электродвигатели аналогового механизма.
Для предотвращения рассинхронизации исполнительного механизма с аналоговым на
величину, большую величины рассогласования, обеспечивающую слежение, аналоговый механизм снабжен устройствами, ограничивающими его рассинхронизацию. Электрические сигналы подаются на эти устройства от реле
ческие цепи следящих электрогидравлических приводов.
В случае ручного управлепия аналоговым механизмом, зстройства, ограничивающие рассинхронизацию, представляют собой следящие гидроэлементы поводкового тина, которые установлены на шарнирах аналогового механизма и управляются от реле максимального тока следящих электрогидравлических приводов.
В случае механизированного управления аналоговым механизмом устройства, ограничивающие его рассинхронизацию, представляют собой контакты реле максимального тока, последовательно соединенные и включенные в цепь питания фазочувствительных индукционных потенциометров.
Целесообразно для повышения точности управления использовать датчики с питающим напряжением более высокой частоты.
Кроме того, с целью компактности приводов для перемещения звеньев, целесообразно иметь наиболее высокое давление в гидравлической системе.
Управление механической рукояткой посредством аналогового механизма позволяет значительно упростить программирование ее работы, сохранив высокую точность операций и высокую производительность.
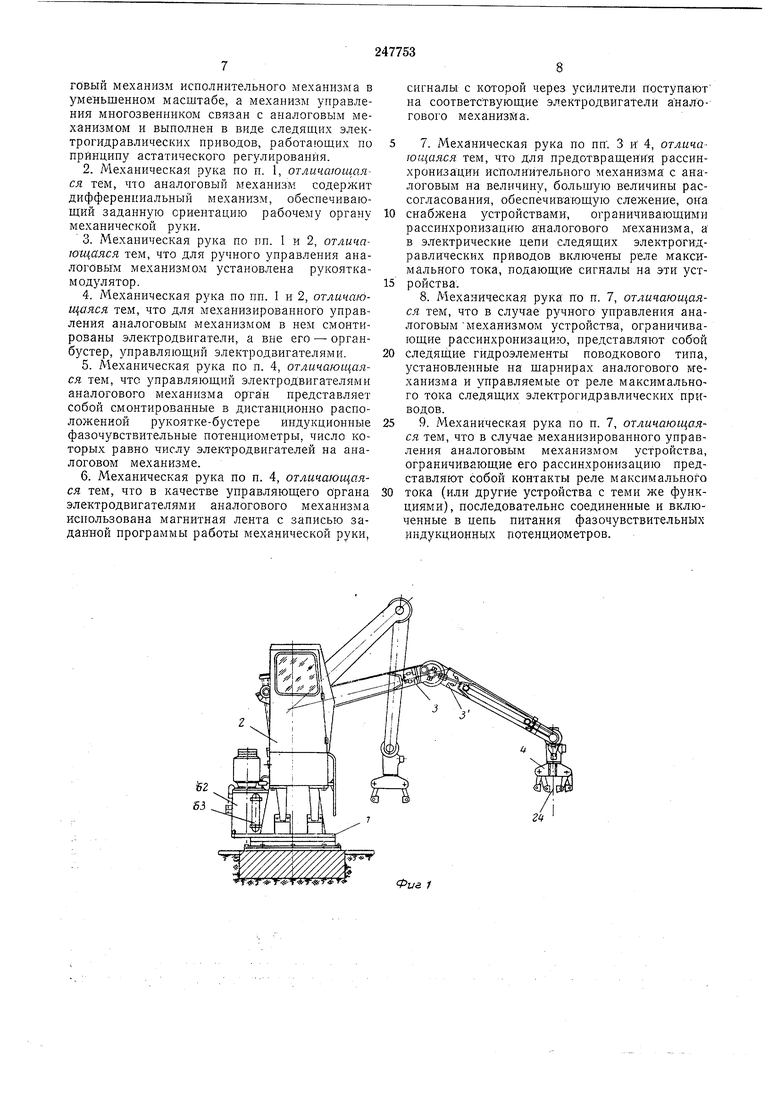
На фиг. 1 изображена механическая рука; на фиг. 2 - стойка механической руки с приводами; на фиг. 3 - привод шарнирного звена (например стрелы) механической руки; на фиг. 4 - сменный рабочий орган (клещи); на фиг. 5 - кинематическая схема аналогового механизма с ручным управлением рукояткой-модуляторорл; на фиг. 6 - кинематическая схема аналогового механизма с электромеханическим приводом управления стрелой; на фиг. 7 - бустер; на фиг. 8 - схема управления электродвигателем аналогового механизма при помощи бустера; на фиг. 9 - схема управления электродвигателем аналогового механизма по программе.
Механическая рука содержит исполнительный механизм со съемным рабочим органом и аналоговый механизм.
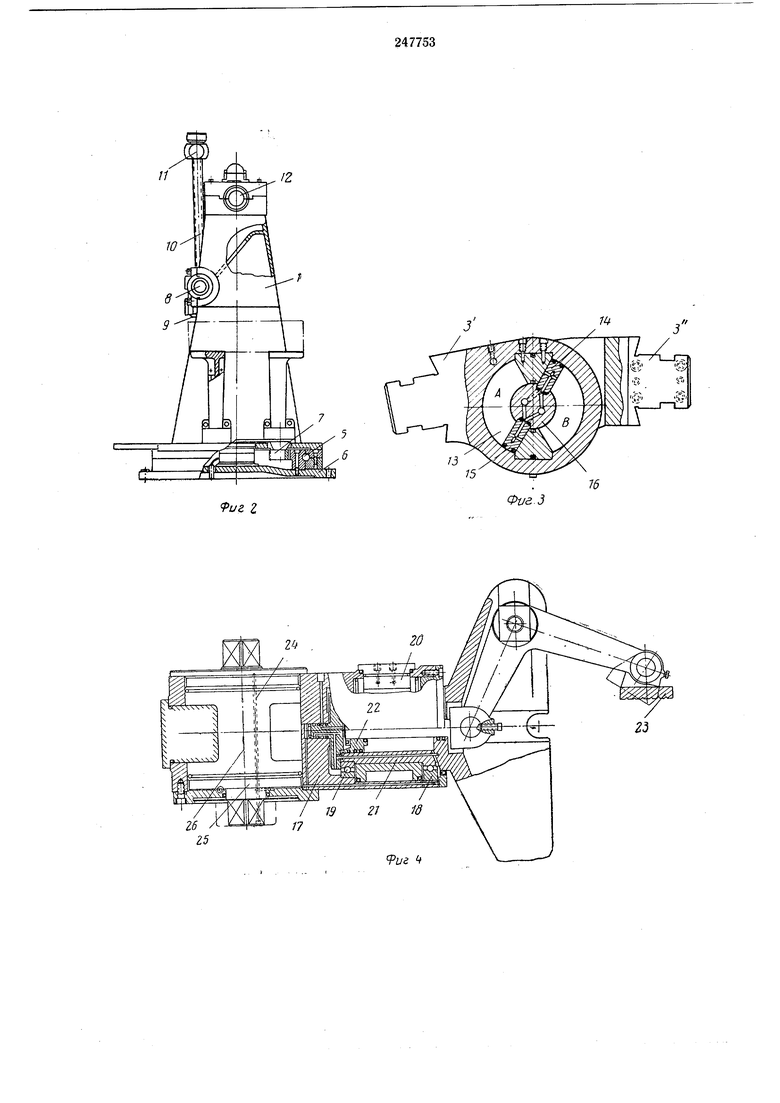
Исполнительный механизм имеет стойку 1 (фиг. I), на которой смонтированы кабина 2 оператора, шарнирный многозвенник - стрела 3, состоящая из звеньев 3 и 3 и рабочий орган - клещи 4, установленный на конечном звене стрелы. Внутри кабины находится ана-. логовый механизм и устройство для программного управления.
Стойка опирается через радиальный подщипник 5 качения на пяту-основание 6 и имеет привод от гидродвитателя 7.
В средней части стойки, в подщипниках- 8 скольжения смонтирован привод поворота стрелы гидродвигатель 9, вращающий винт 10, по которому перемещается гайка 11, и поворачивающий стрелу, на оси 12. Ось 12 установлена в верхней части стойки (фиг. 2).
Звенья 3 и 3 стрелы связаны меледу собой щарнирно гидроприводом 13, имеющим две рабочие полости Л и J5.
Лопатки 14 и 15 (фиг. 3), укрепленные в катущке 16, под давлением масла, поступающего то в одну, то в другую рабочие полости, поворачивают катушку вместе с одним из звеньев стрелы относительно корпуса гидропривода.
На конечном звене стрелы установлен рабочий орган - клещи 4, в корпусе 17 которых на двух радиальпоупорных подшипниках 18 и 19, размещен сервоцилиндр 20. В сервоцилиндр 20 вмонтирован гидроцилиндр 21 с
поршнем 22.
Сервоцилиндр 20 предназначен для вращения грузозахватывающих органов 23 относительно оси 24 (см. фиг. I и 4), а сжимание и разжимание их осуществляется перемещением
поршня 22 гидроцилиндра 21. Кроме того, в корпусе 17 установлен сервоцилиндр 25, предназначенный для вращения рабочего органаклещей 4 относительно оси 26. Аналоговый механизм с ручным приводом
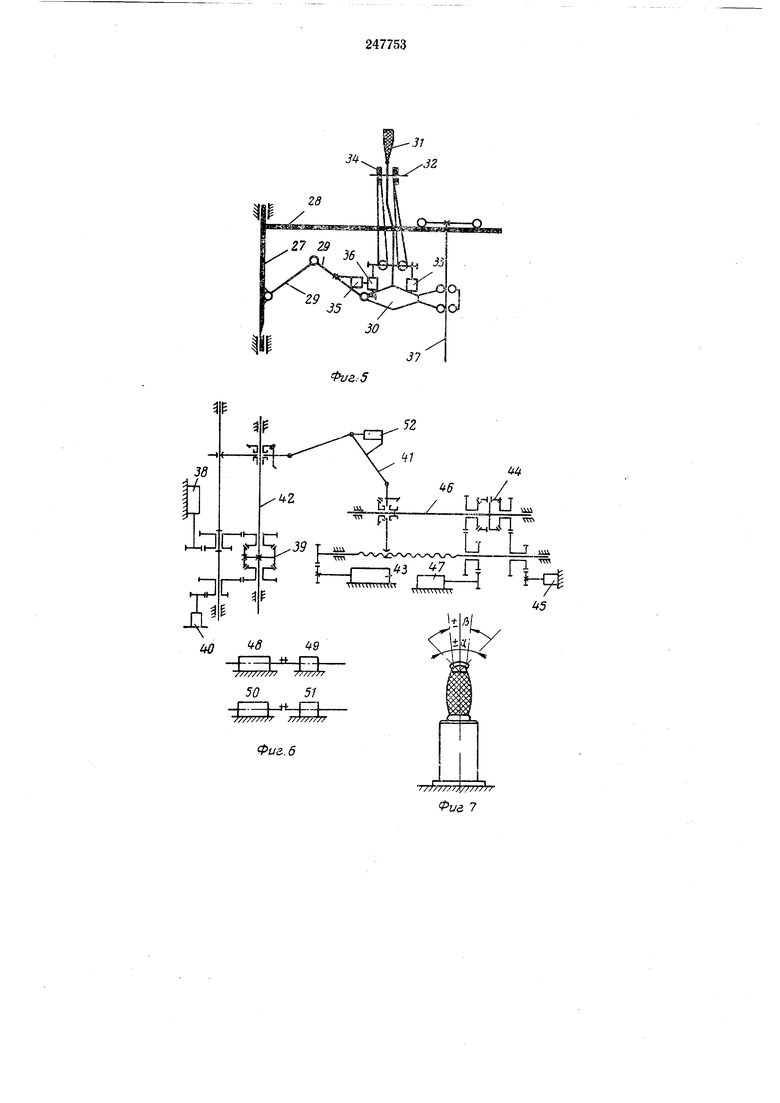
(фиг. 5) состоит из многозвенного рычажного механизма, масштабно соответствующего исполнительному механизму (см. фиг. 1). Мас штабное соотношение исполнительного и аналогового механизмов определяется по конструктивным соображениям: с одной стороны - габаритами исполнительного механизма, например высотой, подъемом стрелы, вылетом ее, а с другой - малыми габаритами и удобством в эксплуатации аналогового механизма.
Ось 27 с консолью 28 (см. фи-г. 5) аналогового механизма масштабно соответствует стойке исполнительного механизма. Рычаги 29 соответствуют звеньям 3 и 3, каретка 30- конечное звено аналогового механизма - клещам 4.
С кареткой 30 жестко соединена рукояткамодулятор 31 оператора, на которой установлены лимб 32, связанный с датчиком 33 поворота клещей, и лимб 34, -связанный через дифференциальную пару 35 с датчиком 36.
Каретка 30 может перемещаться вдоль рейки 37, а последняя - вдоль консоли 28, которая жестко связана с осью 27 и может поворачиваться вокруг собственной оси. Таким образом, рукоятка 31 может перемещаться во всех трех плоскостях.
Ось 24 клещей при помощи лимба 34 (см. фиг. 5) можно устанавливать в любом положении плоскости стрелы 3 исполнительного
механизма, независимо от угловых перемещений в датчике 36, при перемещении каретки 30 в плоскости аналогового механизма (фиг. 1 и фит. 5). Аналоговый механизм может быть также
выполнен с электромеханическим приводом, включающим электродвигатели постоянного тока. В этом случае электродвигатель 38 (фиг. 6) вращает через дифференциальный механизм 39 сельсин-датчик 40 и перемещает
Электродвигатель 43 через дифференциальный механизм 44 вращает сельсин-датчик 45 и -перемещает рычажный механизм 41 вдоль оси 46.
Электродвигатель 47 через дифференциальный механизм 44 сообщает сельсин-датчику 45 дополнительное вращение, обеспечивая этим рабочему органу заданную ориентацию в любом положении в плоскости многозвенника. Перемещение рычажного механизма 41 вдоль оси 42 соответствует вертикальному перемещению рабочего органа - клещей исполнительного механизма. Перемещение рычажного механизма 4} вдоль оси 46 соответствует горизонтальному перемещению рабочего органа- клещей 4 исполнительного механизма.
При сочетании этих перемещений можно получить заданную траекторию движения рабочего органа.
Для обеспечения вращения стойки / (см. фиг. 1) вокруг оси 27 используется электродвигатель 48 и сельсин-датчик 49 (см. фиг. 6).
Для обеспечения вращения грузозахватывающих органов 23 вокруг оси 24 (см. фиг. 4) предназначен электродвигатель 50 и сельсиндатчик 51 (фиг. 6).
Угловые перемещения сельсин-датчиков 40, 45, 49, 51 и сельсин-датчика 52, установленного на рычажном механизме 41, и угловые перемещения сельсин-приемников, установленных в соответствующих щарнирных звеньях исполнительного механизма (на фиг. не показаны) , преобразуются в электрические сигналы, которые после усиления подаются на управляющие обмотки гидравлических золотников электрогидравлических следящих приводов (на фиг. не показаны) перемещения исполнительного механизма.
Таким образом, механическая рука имеет пять аналогичных следящих систем, обеспечивающих электрогидравлические связи щарнирных звеньев исполнительного механизма с аналоговым по принципу астатического регулирования.
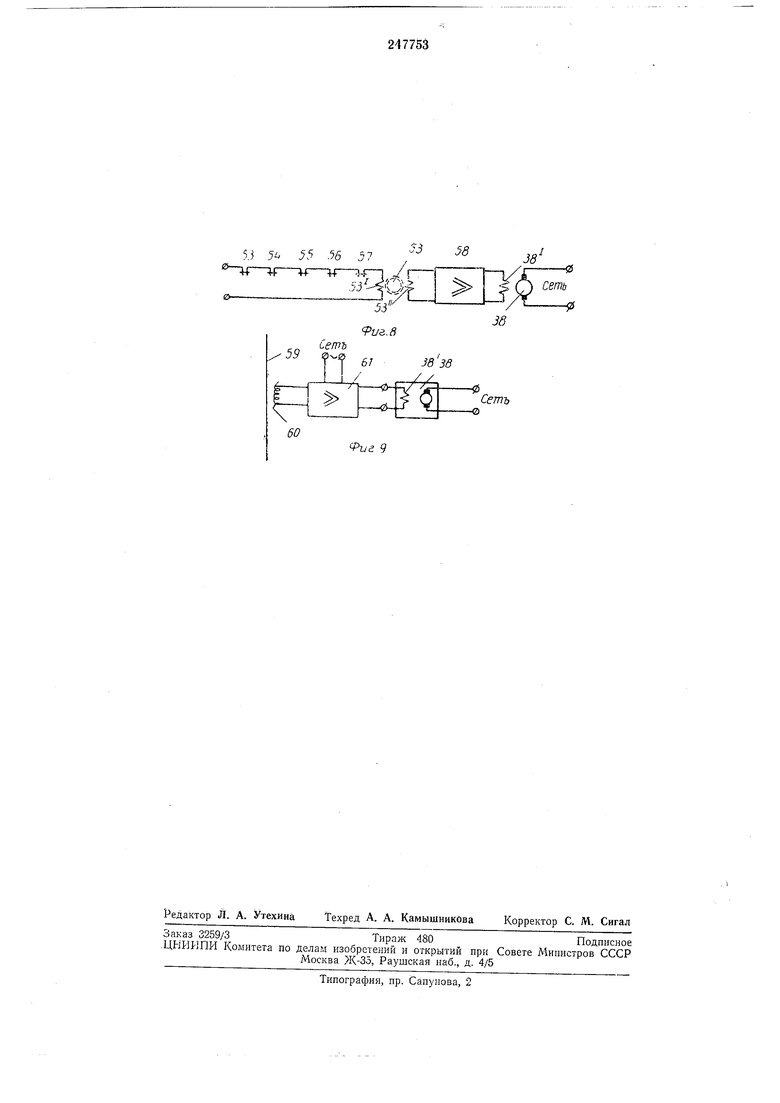
Для управления электродвигателями 38, 43, 47, 48 и 50 постоянного тока (фиг. 6) в цепях управляющих обмоток этих электродвигателей установлены фазочувствительные индукционные потенциометры 53 (на фиг. 8 показан только один), вмонтированные в рукоятку-бустер (фиг. 7) так, что при поворотах последней вперед, назад, вправо, влево и вокруг своей оси оператор управляет соответственно теми или иными потенциометрами, которые, в свою очередь, передают сигналы на соответствующие электродвигатели аналогового механизма. Число потенциометров соответствует числу электродвигателей.
Напряжение питания подается на управляющую обмотку 53 фазочувствительного потенциометра 53 (фиг. 8) через последовательно соединенные контакты реле 53, 54, 55, 56 и 57 максимального тока, включенные параллельно управляющим обмоткам гидравлических золотников электрогидравлических следящих приводов перемещения исполнительного механизма.
С исполнительной обмотки 53 (фиг. 8) потенциометра 53 напряжение подается на электронный усилитель 58 и далее на управляющую обмотку 58 электродвигателя 38 (остальные потенциометры и усилители на фиг. 8 не показаны).
Механическая рука может также работать по программе.
Программирование работы механической руки производится путем записи на магнитную ленту 59 (фиг. 9) сигналов управления
электродвигателями 38, 43, 47, 48 и 50 (см. фиг. 6) аналогового механизма (с электромеханическим приводом) отдельно на каждую дорожку магнитной ленты. Снимаемые магнитными головками 60 (на фиг. 9 показана
только одна) сигналы подаются на усилитель 61 (показан только один) и далее на управляющие обмотки электродвигателей 38, 43, 47, 48, 50 (на фиг. 8 показана только одна - 38).
Механическая рука снабжена устройством для предотвращения рассинхронизации исполнительного механизма с аналоговым.
В цепи управляющих катущек золотников следящих приводов исполнительного механизма включены реле 53, 54, 55, 56 и 57 максимального тока, а контакты их (или другие устройства с теми же функциями) включены в цепь управляющих обмоток фазочувствительных потенциометров.
Для питания электрогидравлической следящей системы на механической руке установлены гидронасосная станция 62 и гидроаккумулятор 63, который обеспечивает работу механической руки на некоторое время после снятия электропитания гидронасосной станции (см. фиг. 1).
Механическая рука может быть выполнена в нескольких модификациях: на подвижном и неподвижном основаниях, с различным числом звеньев многозвенника - стрелы.
Предлагаемая механическая рука может быть использована в термических, кузнечнопрессовых, щтамповочных цехах на погрузочно-разгрузочных работах, при монтажах (например при сборке в вакуумных камерах), работах в реакторных залах или при производстве радиоактивных материалов.
Механическая рука, например, с грузоподъемностью 750 кг,- линейной скоростью
300 мм/сек, окружной скоростью 5 об/мин, вылетом стрелы 4 м, высотой подъема груза 2,5 м имеет установленную мощность 30 кет.
Предмет изобретения
1. Механическая рука, исполнительный механизм которой представляет собой управляемый щарнирный многозвенник с рабочим органом на конце, отличающаяся тем, что, с целью упрощения управления, она содержит аналогбвыи механизм исполнительного механизма в уменьшенном масштабе, а механизм унравления многозвенником связан с аналоговым механизмом и вынолнен в виде следяш,их электрогидравлических нриводов, работающих по принципу астатического регулировапйя.
2.Механическая рука по п. 1, отличаюишя ся тем, что аналоговый механизм содержит дифференциальный механизм, обеспечнваюШ.ИЙ заданную ориентацию рабочему органу механической руки.
3.Механическая рука по пп. 1 и 2, отличающаяся тем, что для ручного управления аналоговым механизмом установлена рукояткамодулятор.
4.Механическая рука по пн. 1 и 2, отличающаяся тем, что для механизированного управления аналоговым механизмом в нем смонтированы электродвигатели, а вне его - органбустер, управляюш,ий электродвигателями.
5.Механическая рука по п. 4, отличающаяся тем, что зправляюший электродвигателями аналогового механизма оргган представляет собой смонтированные в дистанционно расположенной рукоятке-бустере индукционные фазочувствительные потенциометры, число которых равно числу электродвигателей на аналоговом механизме.
6.Механическая рука по п. 4, отличающаяся тем, что в качестве управляющего органа электродвигателями аналогового механизма использована магнитная лента с записью заданной программы работы механической руки.
сигналы с которой через усилители поступают на соответствующие электродвигатели аналогового механизма.
7.Механическая рука но пп. 3 п 4, отличающаяся тем, что для предотвращения рассинхронизации исполнительного механизма с аналоговым на величину, большую величины рассогласования, обеспечивающую слежение, она снабжена устройствами, ограничивающими рассинхронизацню аналогового механизма, а в электрические цепи следящих электрогидравлических приводов включены реле максимального тока, подающие сигналы на эти устройства.
8.Механическая рука по п. 7, отличающаяся тем, что в случае ручного управления аналоговым механизмом устройства, огранич ивающие рассинхронизацию, представляют собой следящие гидроэлементы поводкового типа, установленные на шарнирах аналогового механизма и управляемые от реле максимального тока следящих электрогидравлических приводов.
9.Механическая рука по п. 7, отличающаяся тем, что в случае механизированного управления аналоговым механизмом устройства, ограничивающие его рассинхронизацию представляют собой контакты реле максимального тока (или другие устройства с теми же функциями), последовательно соединенные и включенные в цепь питания фазочувствительных индукционных потенциометров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
| Электрогидравлическая следящая система для манипулятора | 1958 |
|
SU116059A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
г«
Фиг 1
9иг Z
Фvг.д
9иг
Ь-г-Э«г иЗ l-cJ
T mrtTTWrt l r15 У
37
««
«5
5J 56 J5 .56 51
58
(.етъ
ЛИП
J5 У /
///
Сеть
