Изобретение относится к устройствам, облегчающим труд механизаторов, а также повын ающим точность ручного, автоматического и дистанциониого управления сельскохозяйственными агрегатами. Оно -может быть использовано и как самостоятельный прибор следящего действия в схемах измерения и управления.
В механизмах управления современных гусеничных тракторов одному и тому же отклонению рычагов управления соответствуют различные радиусы и угловые скорости поворотов трактора в зависимости от тягового усилия и поступательной скорости движеиия. Это приводит к необходимости напряженного слежения за поведением трактора как при уводе, так и во время управляемого поворота. Качество слежения зависит от квалификации тракториста.
Известные автоматические устройства для направления движения агрегата не обеспечивают качественного слежения в разнообразных, изменяющихся полевых условиях. Устройства содержат источники и цепи электрического и гидравлического питания, управляющие реостаты и электрогидравлический сервомеханизм.
том независимо от возмущающих воздействий, (например, тягового усилия и скорости движения) снабжена мостовой схемой, в одно из плеч которой включены бесконтактные датчики угловых скоростей механизма поворота, обеспечивающие отрицательную обратную связь по разности угловых скоростей выходных звеньев механизма поворота.
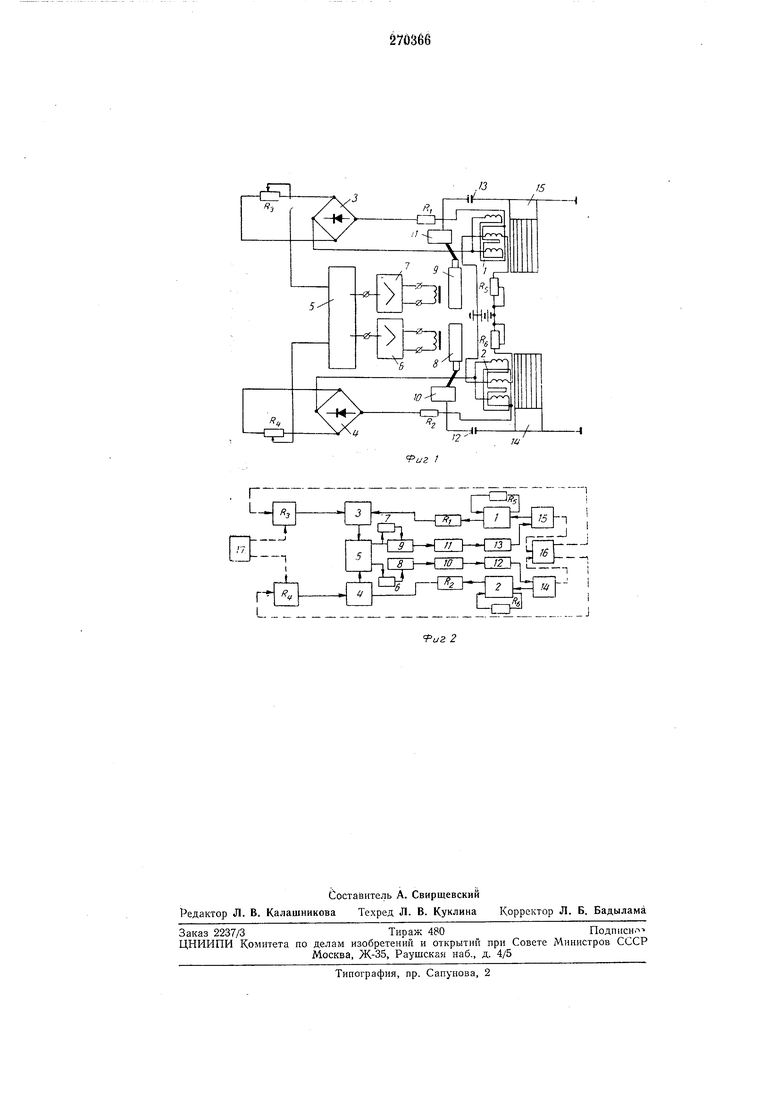
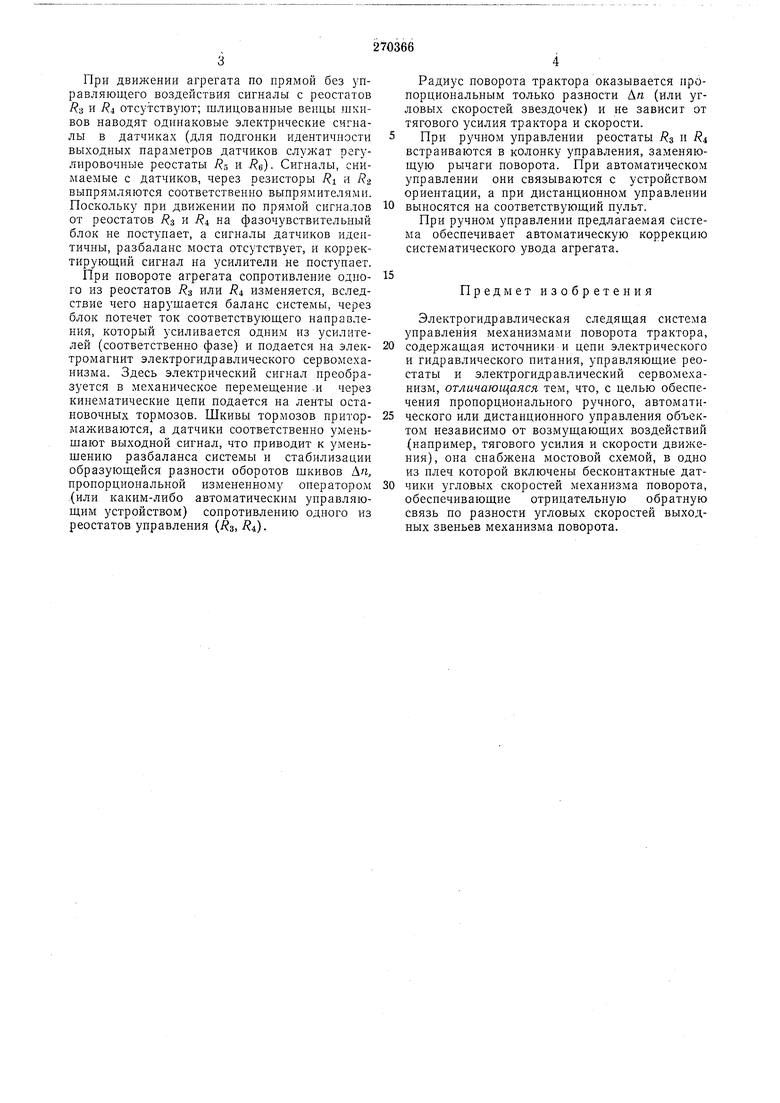
На фиг. 1 представлена принципиальная схема предлагаемого устройства; на фш. 2
функциональная схема.
Здесь 1,2 - бесконтактные (например, индуктивные) датчики правого и левого останоночных тормозов; 3, 4 - выпрямители сигналов датчиков; 5 - входной фазочувствительный блок иостоянного тока; 6, 7 - усилители постоянного тока; 8, 9 электрогидравлические сервомеханизмы левого и правого остановочных тормозов; 10, 11 кинематические силовые цепи; 12, 13 - ленты остановочных тормозов; 14, 15 - щкивы остановочных тормозов со шлицованными венцамщ 16 - объект управления - трактор; 17 - трактористоператор; , R., - нагрузочные резисторы; RS, Ri - реостаты управления; , - реостаты настройки датчиков. При движении агрегата по прямой без управляющего воздействия сигналы с реостатов и отсутствуют; шлицованные венцы шкивов наводят одинаковые электрические сигналы в датчиках (для подгонки идентичности выходных параметров датчиков служат регулировочные реостаты Rs и R). Сигналы, снимаемые с датчиков, через резисторы Ri и Ко выпрямляются соответственно выпрямителями. Поскольку при движении по прямой сигналов от реостатов з и на фазочувствительный блок не поступает, а сигналы датчиков идентичны, разбаланс моста отсутствует, и корректирующий сигнал на усилители не поступает. При повороте агрегата сопротивление одного из реостатов Ra или R изменяется, вследствие чего нарушается баланс системы, через блок потечет ток соответствующего направления, который усиливается одним из усилителей (соответственно фазе) и подается на электромагнит электрогидравлического сервомеханизма. Здесь электрический сигнал преобразуется в механическое перемещение и через кинематические цепи подается на ленты остановочных тормозов. Шкивы тормозов притормаживаются, а датчики соответственно уменьшают выходной сигнал, что приводит к уменьшению разбаланса системы и стабилизации образующейся разности оборотов шкивов Д«, пропорциональной измененному оператором .(или каким-либо автоматическим управляющим устройством) сопротивлению одного из реостатов управления (.з, Rt)Радиус поворота трактора оказывается пропорциональным только разности Л« (или угловых скоростей звездочек) и не зависит от тягового усилия трактора и скорости. При ручном управлении реостаты R и 4 встраиваются в колонку управления, заменяющую рычаги поворота. При автоматическом управлении они связываются с устройством ориентации, а при дистанционном управлении выносятся на соответствующий пульт. При ручном управлении предлагаемая система обеспечивает автоматическую коррекцию систематического увода агрегата. Предмет изобретения Электрогидравлическая следящая система управления механизмами поворота трактора, содержащая источники и цепи электрического и гидравлического питания, унравляющие реостаты и электрогидравлический сервомеханизм, отличающаяся тем, что, с целью обеспечения пропорционального ручного, автоматического или дистанционного управления объектом независимо от возмущающих воздействий (например, тягового усилия и скорости движения), она снабжена мостовой схемой, в одно из нлеч которой включены бесконтактные датчики угловых скоростей механизма поворота, обеспечивающие отрицательную обратную связь по разности угловых скоростей выходных звеньев механизма поворота.
-
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН | 1966 |
|
SU188311A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСТАНОВКОЙ ИЗ НЕСКОЛЬКИХ СИЛОВЫХАГРЕГАТОВ | 1971 |
|
SU453677A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНОГО АГРЕГАТА | 1967 |
|
SU202604A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| Устройство для автоматического поворота тракторного агрегата | 1976 |
|
SU593680A1 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ | 1970 |
|
SU260434A1 |