Известны механизмы привода шпинделей Хлопкоуборочного аппарата, установленных по окружности вращающегося барабана, содержащие наружную и внутреннюю неподвижные направляющие дорол ки и свободно вращающиеся на осях подпружиненные ролики, установленные в прол1ежутках между дорожками. Ролики нредназначены для торможения приводных роликов шпинделей при сходе их с одной дорожки перед соприкосновением с другой дорожкой, на которой они получают обратное вращение. Однако, в таких механизмах вследствие пассивности роликов и расположения амортизирующих пружин непосредственно на рычате приводные ролики испытывают значительные динамические нагрузки и не обеспечивают необходимого торможения щпинделей.
В предложенном механизме для уменьшения износа поверхности наиравляющих дорожек и снижения иотребляемой мощности ролики связаны с осями пружина ми скручивания.
Для снижения динамических нагрузок ролики установлены на поворотных рычагах.
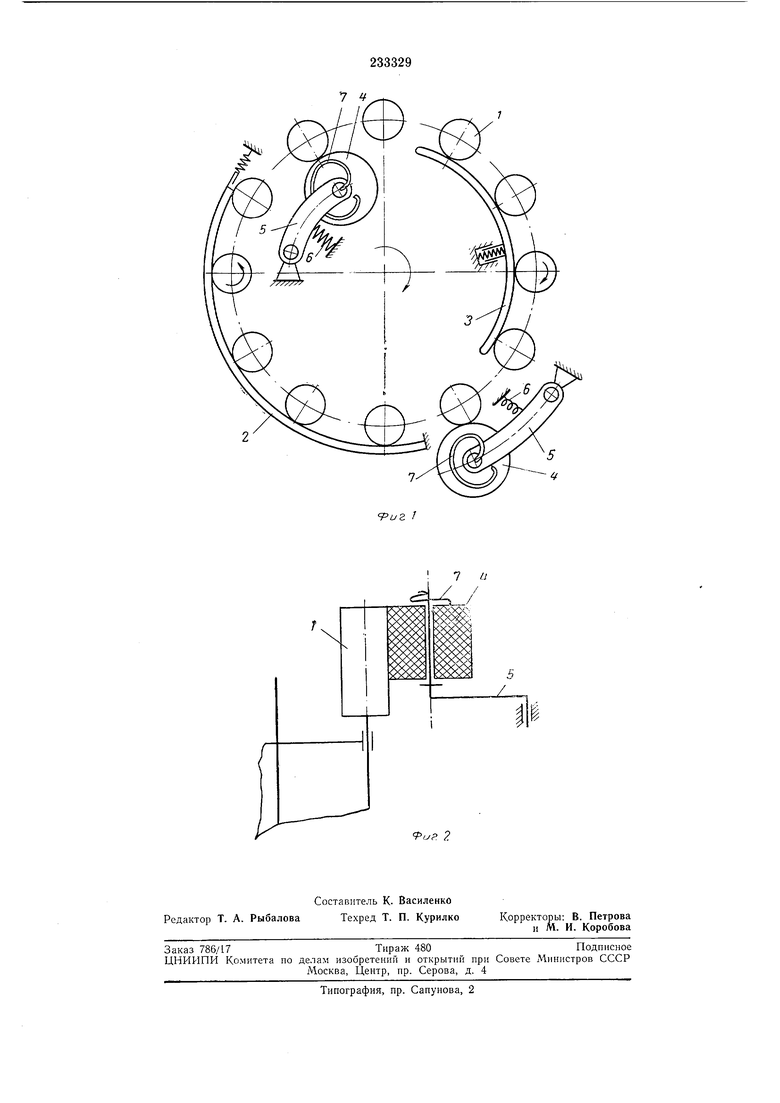
Механизм содержит приводные ролики / шпинделей, наружную 2 и внутреннюю 3 неподвижные направляющие дорожки, ролики 4, свободно укрепленные на осях рычагов 5 с пружинами 6 сжатия и соединенные с рычагами пружинами 7 скручивания.
При работе аппарата и вращении шпиндельного барабана в рабочей зоне приводные ролики шпинделей перекатываются по наружной направляющей . При сходе с дорожки они контактируют с роликом, установленным между дорожками. Этот ролик, амортизируя удар, вращаясь вокруг своей оси и закручивая пружину, соединяющую его с рычагом, одновременно тормозит приводные ролики.
В момент остановки приводного ролика контактирующий с ним под действием выпрямляющейся пружины скручивания получает вращение и увлекает за собой ролик, набегающий далее на внутреннюю направляющую дорожку, расположенную в зоне съема хлопка со шпинделей, которые вращаются при этом в обратном направлении.
Испытания показали, что торможение шпинделей во время контакта роликов осуществляется при повороте барабана на угол 18- 20°, разгон в обратном направлении - при повороте барабана на угол 12-15°.
Предмет изобретения
1. Механизм привода шнииделей хлонко уборочного аппарата, установленных по окружности вращающегося барабана, содержащий наружную и внутреннюю неподвижные направляющие дорожк-и и свободно вращающиеся на осях подпружиненные ролики, установленные в промежутках между дорожками.
отличающийся тем, что, с целью уменьшения износа рабочей поверхности дорожек и снижения .потребляемой мощности, ролики связаны с осями пружинами скручивания.
2. Механизм по п. 1, отличающийся тем, что, с целью снижения динамических нагрузок, ролики установлены на поворотных рычагах.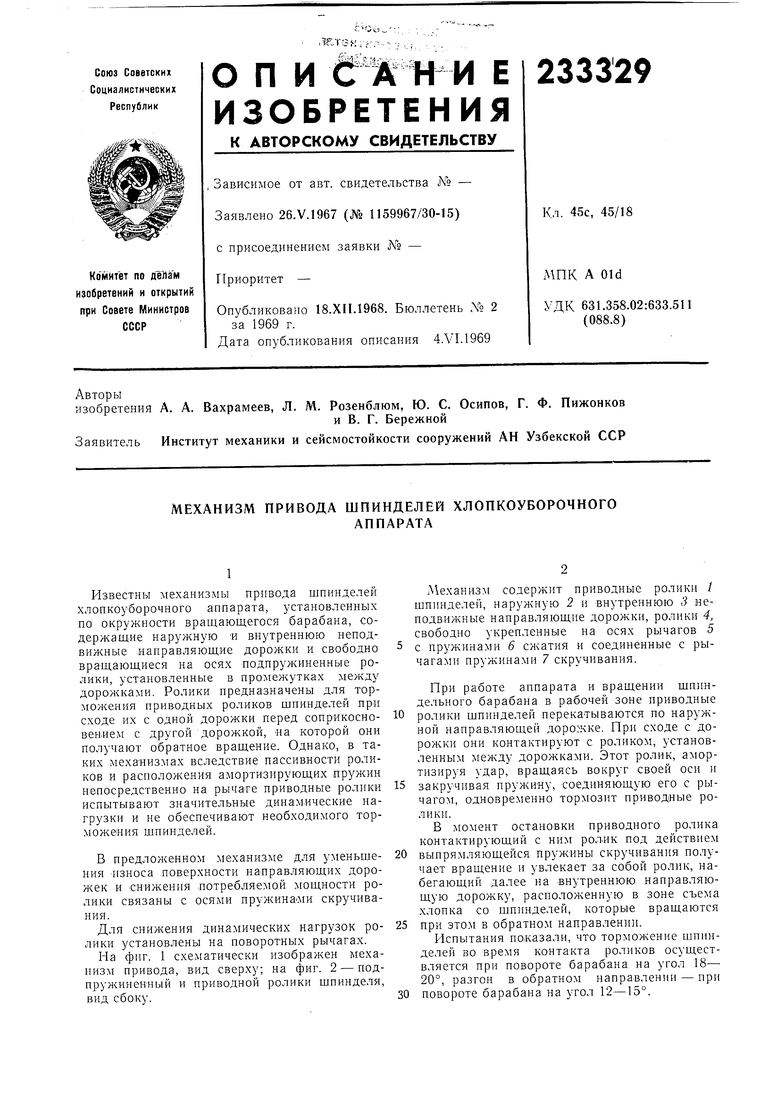
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1968 |
|
SU221410A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1968 |
|
SU209117A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОЙ МАШИНЫ | 1967 |
|
SU223501A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГО АППАРАТАБ:';~;ЛИО' | 1973 |
|
SU393997A1 |
| Привод шпинделей хлопкоуборочного аппарата | 1990 |
|
SU1787359A1 |
| ВЕРТИКАЛЬНО-ШПИНДЕЛЬНЫЙ БАРАБАН ХЛОПКОУБОРОЧНОГО АППАРАТА | 1969 |
|
SU256418A1 |
| ПЛТСИТ.-.С- ^rt''^ Ti:X;j;)vj:G;:.i^ **БПыпшп: ^>& | 1966 |
|
SU178592A1 |
| Механизм привода шпинделей барабана хлопкоуборочной машины | 1982 |
|
SU1039459A1 |
| Привод шпинделей хлопкоуборочногобАРАбАНА | 1979 |
|
SU847956A1 |
| Шпиндель хлопкоуборочного аппарата | 1986 |
|
SU1423037A1 |