Известен механизм привода шпинделей хлопкоуборочного аппарата, содержащий ролики, неподвижные внутреннюю и наружную беговые дорожки, вынолненные по винтовой поверхности.
Из-за необходимости реверсировання вращения шнинделя за один оборот барабана шпиндель дважды меняет направление своего вращения. Ири этом вход ролика в зацепление с зубьями беговых дорожек неизбежно сопровождается ударом за счет мгновенного изменения относительной скорости шпинделя.
Набегание выстуна ролика на зубья беговых дорожек сопровождается жестким, ничем не компенсированным ударом, что ведет к увеличению динамических нагрузок в заценлении, уменьшению долговечности и надежности привода.
Цель изобретения - уменьшение динамических нагрузок, повышение надежности и долговечности привода.
Для этого в предлагаемом механизме ролики выполнены в виде пружин, закрепленных на стержне шпинделя с возмол ностыо продольных перемещений, например, посредством ввода ее концов в паз, выполненный в теле шнинделя.
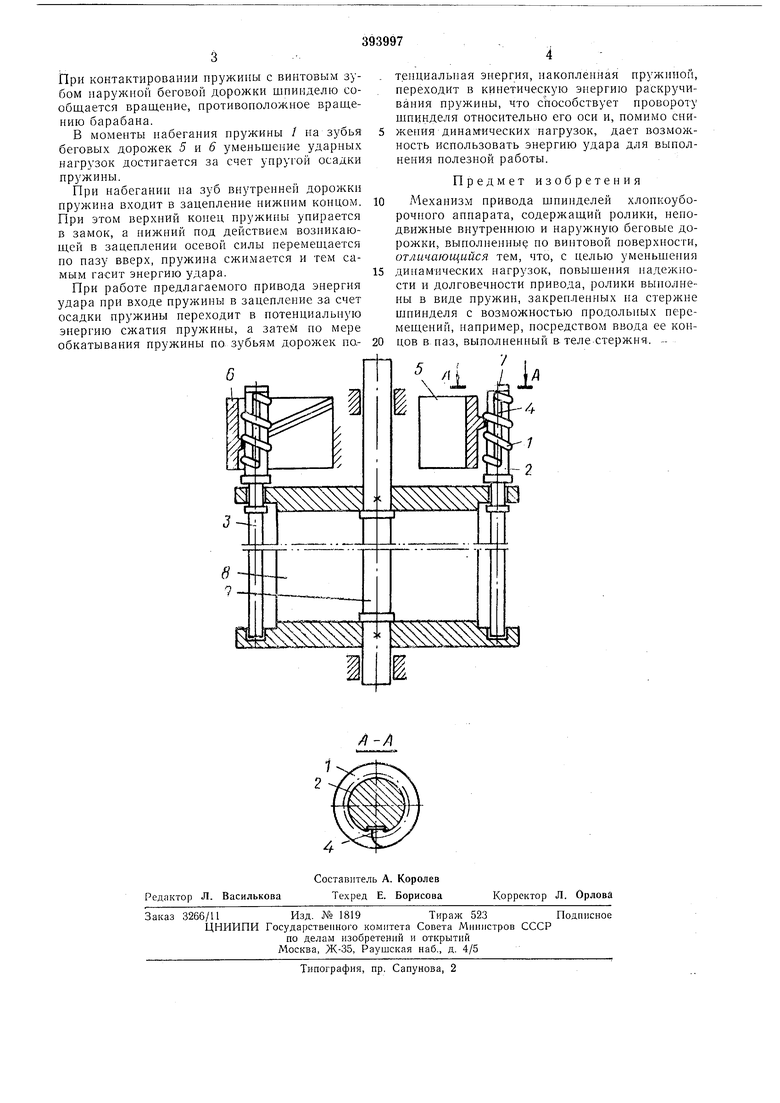
На чертеже представлен шниндельный барабан с предлагаемым механизмом привода шпинделей и сечение ролика по Л-Л.
Механизм привода состоит из ролика, выполненного в виде пружины /, закрепленной на стерл не 2 шнинделя 3 с возможностью нродольных неремещений, но назу 4, и внешней и внутренней беговых дорожек 5 н 6.
Нружина надевается на стержень свободной посадкой. Концы пружины входят в паз стержня и фиксируются только с внешних сторон торцов паза замком 7. Беговая дорожка 5 выполнена в виде сектора с трапецевидным винтовым зубом с постоянным углом подъема и расположена по внутренней дуге окрул ;ности, оннсываемой пружиной. Беговая дорожка Ь выполнена аналогично и расположена но наружной дуге окружно-сти. Угол подъема витка пружины выбирается равным углу подъема зубьев дорожек.
Предлагаемый механнзм привода шпинделей работает следующим образом.
Во время работы хлопкоуборочной машнны барабан 8 через вал 9 нриводится во вращение. Вращаясь относительно своей оси, барабан сообщает переносное движение шнинделю, в процессе которого пружина последовательно входит в зацепление с винтовыми зубьями беговых дорожек. Контактируя с винтовым зубом внутренней беговой дорожки 5, нружина обкатывается но зубу и сообщает шнинделю ,ение отиосительно своей оси, совпадающее с направлением вращения барабана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шпинделей хлопкоуборочногобАРАбАНА | 1979 |
|
SU847956A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОЙМАШИНЫ | 1966 |
|
SU180424A1 |
| Привод шпинделей хлопкоуборочного аппарата | 1990 |
|
SU1787359A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГОАППАРАТА | 1969 |
|
SU233329A1 |
| КОЛОДКА ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧПОГО АППАРАТА | 1970 |
|
SU275579A1 |
| Привод шпинделей хлопкоуборочного барабана | 1981 |
|
SU952151A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1968 |
|
SU209117A1 |
| Натяжной барабан ленточного конвейера | 1981 |
|
SU960097A1 |
| Шпиндель хлопкоуборочного аппарата | 1986 |
|
SU1423037A1 |
| Привод шпинделей хлопкоуборочного барабана | 1982 |
|
SU1110402A1 |
