Известны устройства для определения пространственного положения оси ствола скважииы способом последовательных ходов, содержащие несколько штанг, узлы, сочленяющие щтанги, измерители угла.
Предложенное устройство отличается тем, что, с целью повыщения точности измерении, узлы, сочленяющие штанги, выполнены в виде трехосных щарнпров и соединены тягами с маятниковым измерителем зенитного угла.
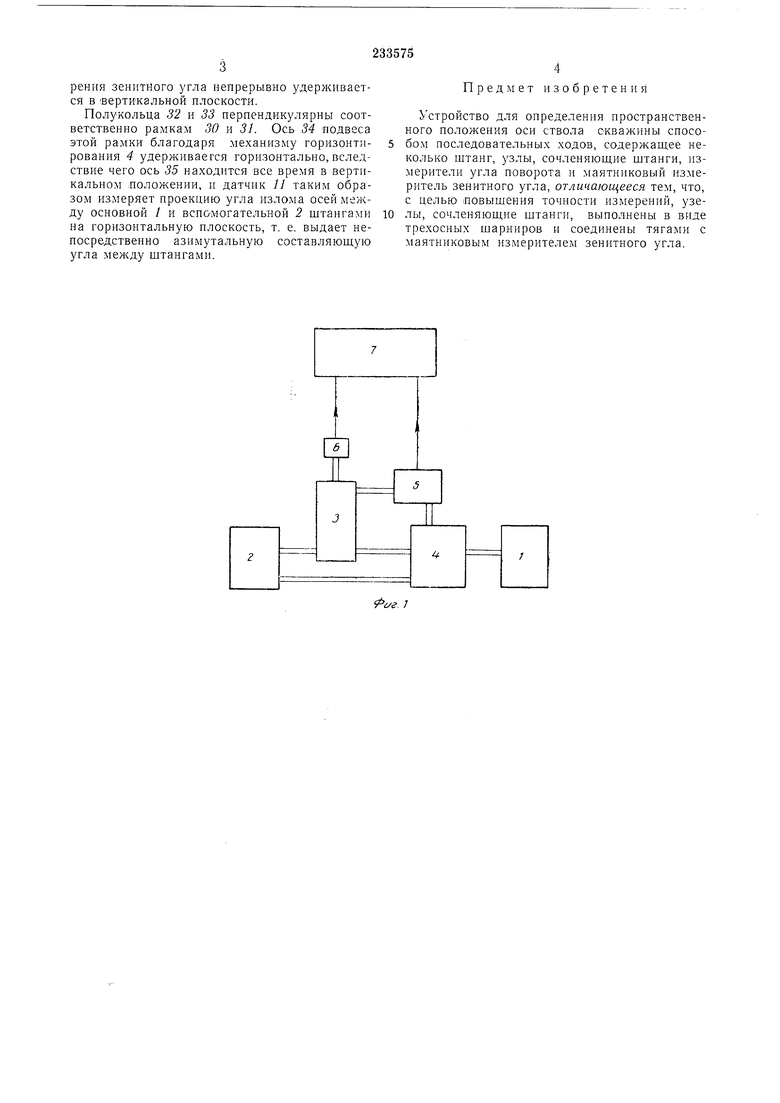
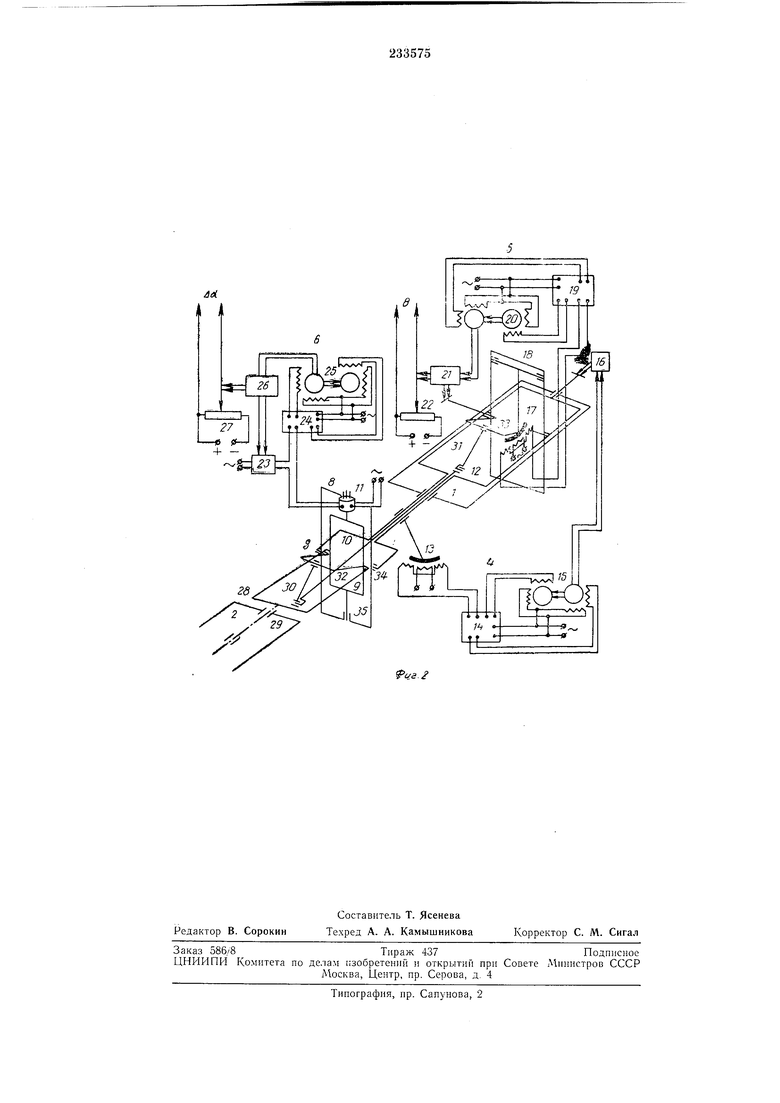
На фиг. 1 изображена блок-схема описываемого устройства: на фиг. 2-принципиальная схема передающего устройства.
Устройство для определения пространственного положения оси ствола скважины состоит из основной 1 и вспомогательной 2 штанг, трехосного шарнирного узла 3, механизма горизонтирования 4 и механиз.ма измерения зенитного угла 5, размещенных в основной щтанге, механизма измерения 6 азимутальной составляющей угла между штангами, размещенного в трехосном щарнирном узле, и наземного принимающего прибора 7.
Трехосный щарнирный узел состоит из рамки 8 и крестовины 9; рамка 8 соединена щтангой 10 с механизмом измерения зенитного угла 5. На оси сочленения рамки 8 и крестовины 9 находится датчик 11 азимутальных составляющих угла между щтангами / и 2. Механизм горизонтирования 4 связан с рамкой
12 и механизмом измерения зенитного угла и удерживает плоскости измерения зенитного угла механизма 5 в вертикальноГ плоскости, а рамку 12 - в илоскости, перпендикулярной
к вертикальной.
Шарнирный узел должен быть защищен гибким гофрированным . Механизм горизонтирования состоит из датчика 13 (горизонтального маятника) угла отклонения,
усилителя 14, двигателя 15 и редуктора 16. Механизм измерения зенитного угла состоит из маятника с датчиком отклонений 17, иомещенного в рамке 18, усилителя 19, двигателя 20, редуктора 21 и иотенциометра 22 диста)ционной иередачи показаний на иоверхность. Механизм 6 из.мерения азимутальной составляющей угла .между штангами состоит из датчика 11 угла отклоиений, датчика 23 отработки следящей системы, усилителя 24, серводвигателя 25, редуктора 26 и потенциометра 27 дистанционной иередачи показаний на поверхность.
В трехосном шарнире размещен только датчик 11 угла отклонений, все прочие детали механизма 6 размещены в основной штанге /. PaiMKa 28 свободно вращается в подшипниках 29 щтанги 2, горизонтируется через кинематическую связь механизма 4 от рамки 12. Рамка 8 трехосного шарнирного узла 3 при помощи
рения зенитного угла непрерывно удерживается в вертикальной плоскости.
Полукольца 32 и 33 перпендикулярны соответственно рамкам 30 и 31. Ось 34 подвеса этой рамки благодаря механизму горизонтирования 4 удерживаегся горизонтально, вследствие чего ось 35 находится все время в вертикальном положении, и датчик 11 таким образом измеряет проекцию угла излома осей между основной / и вспомогательной 2 штангами на горизонтальную плоскость, т. е. выдает непОСредственно азимутальную составляющую угла между штангами.
Предмет изобретения
Устройство для определения пространственного положения ОСИ ствола скважины способом последовательных ходов, содержаш,ее неколько штанг, узлы, сочленяющие штанги, измерители угла поворота и маятниковый измеритель зенитного угла, отличающееся тем, что, с целью повышения точности измерений, узелы, сочленяющие штанги, выполнены в виде трехосных шарниров и соединены тягами с маятниковым измерителем зенитного угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| Устройство для измерения кривизны буровых скважин | 1940 |
|
SU73116A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1983 |
|
SU1134705A1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК ИНКЛИНОМЕТРА | 1995 |
|
RU2126525C1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
| Инклинометр | 1982 |
|
SU1082939A1 |
9ца.
