Изобретение относится к устройствам для определения энергетического сиектра морского волнения и может быть исиользовано для получения характеристик волнения, необходимых при изучении поведения кораблей в штормовом море.
Известны устройства для измерения параметров морского волнения, содержап1пе буй, герметичную камеру, гировертикаль, датчик ускорения, регистрирующий прибор и источник питания. В таких устройствах для стабилизации буя используется флюгарка, укрепленная на буе, разворачивающая его по линии ветра, при этом стабилизация по азимуту производится разворотом буя, что не обеспечивает требуемой точности измерений.
Целью изобретеиия является повышение точности измерений.
Для достижения этого измерение углов волнового склона производится с помощью гировертикали, стабилизация которой осуществляется не разворотом буя, а разворотом иодвижной илощадки, на которой находится гировертикаль, относите.тьно буя, а ориентация осей гировертикали ио азимуту осуществляется с иомощью следящей системы и феррозондового датчика магнитного поля Земли. При этом для улучшения динамических качеств плавучей части и комиецсации реактивного момента к бую подвешен обтекаемый контейнер с ириборами и источником питания, а на его днище в горизонтальной плоскости радиально укреилсны демпфирзющие крылья.
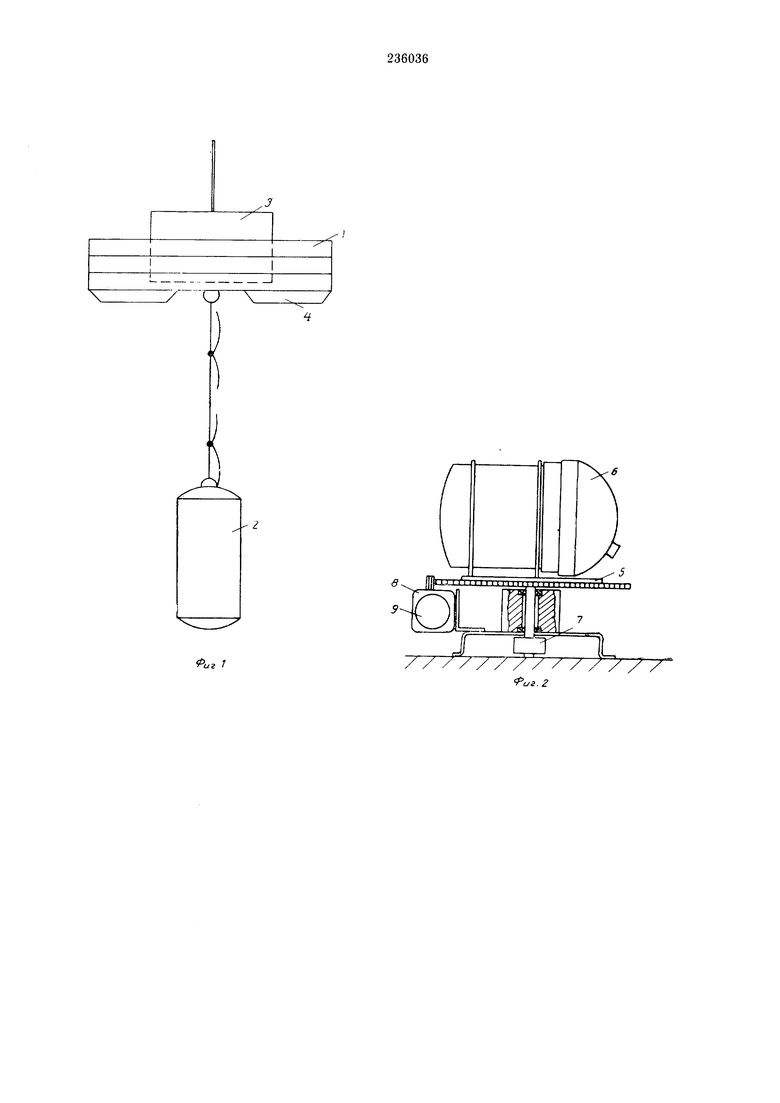
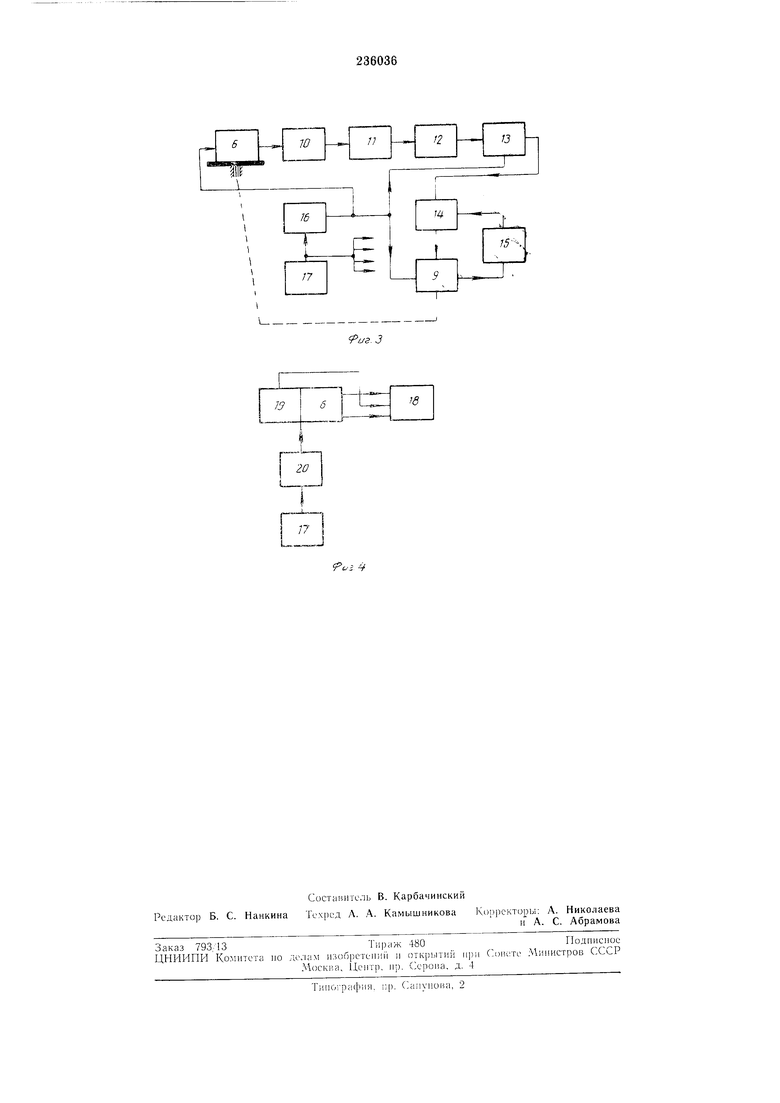
На фмт. 1 изображено описываемое устройство, общий вид; на фиг. 2 - гировертикаль с подвижной платформой; на фиг. 3 - блоксхема магнитной ориентации; на фиг. 4 - блок-схема регистрации пара.метров.
Устройство (см. фпг. 1) состоит из трех основны.х частей: буя 1, подвешенного к нему контейнера 2 п укрепленной на буе герметичной 1камеры 3, обеспечпвающей плавучесть всего устройства. Буй пмеет форму цилиндра, отношение диаметра которого к образующей равно 5, и изготовлен из иенопластовых листов. Коитейнер и герметичная камера выполнены из немагнитного материала, например дюралюминия. На днище буя укреплены демпфирующие крылья 4, расходящиеся по радиусам от его центра.
В герметичной камере 3, расположенной на плавучей части буя J, размещены: подвижная площадка 5, г)1ровертикаль 6 с феррозондовым датчиком магнитного поля Земли (на чертеже не показан), токосъемник 7 редуктор 8, исполнительный дв1 гатель 9 и электронное оборудование (см. фиг. 3) системы магнитной ориентации. В эту систему входят усилитель JO второй гар.монпки, выпрямитель 11 четных гармоник, фильтр Г2, модулятор 13, усилитель
j4 следящей системы, цепь 15 обргггной связи по скорости, преобразователь 16 постоянного тока в трехфазный ток частотоГ: 500 (/;, нанряженнем 36 а i аккумулятор 17.
Двигатель гнроскоиа питается непосредственно от преобразователя 16. Феррозоидов1.1Ц датчик работает ио и)инн1И у магнитиого сиители с удвоением частоты и обла.даст высокой стабильностью и надежностью. Пита.иис его осуп1,ествляется от иреоб)азов;1те.тя 16 через трансформато) и реоста.т оптим;1льного тока подмагнпчивания (на чертеже ис noi aзгпы).
Для измерении yr.TOis lio.iHOBoro склона но двум взаимно иериендикулярн1,м иаправденнял (ем. фиг. 4) непользуются нотеипиометрические датчики гироекопическо ве)тикали 0. Сигна.пл с д,атчнко15 иоетуиают на п1ЛсГи|)Ы ос1иККН)1рафа 18, вместо которого может iipi;меняться трехкаиальпьп :,а.гнито(1)си1. ;1,1тчи ускорения 19 устаповдеи иа впутрспие )аме гироскоинческоп ьертика.и; и под1хлючс1{ ; осии:1/И)гра( 18. /1,,1я иитання иотспдномст-ричеСлих даггчиков нсиольз ется стабилизатор 20 п.ми;) на транзисторах.
В иодвгсном контейнере 2 раснолагают акку:.1улятор 17, 11рсобразователь 16 и осцнлло5 граф IS (ил; магнитофОн). Вынесение этих элементов в контейнер позволяет уменьшить л;олкпгг эне)гин буя 1 п, кроме того, сам контейнер с. якорем буя.
Чтройст1К} л.,ля изме1)ения иараметро морс;чого В0.1НСПИЯ. содержалнее , ге)метичную камеру, гиро15ертика; ь, датчик ус1 орения, ;чгистрир т(лии11 прибор ;i лсточншч иитаппя.
ог.тчик/п ссси Тем, что, с ис.пдо новыи:ення точности i;3MepiHi:ii, li нем )тпкаль снабжена с,Кдяним| CHCTCMCJJ) с 1Ьс1)и)зоид(}:И, да1чи; о , магпитного ноля Земли li стазозлсиа lia подвижной нло1дадке i; ч рметичHviii камсрс. расиоложенно ; ii дентпе бхя. на дпип1с- |.;;11орог() н го 11;3онта.1ьно1| плоскост) радиал1 но :;р1М1лены демп(1 11р ионин кр1)1:И)Я, а и HeHTpi 1:()диси1еи i OHTeiiHe;) обтскас-мой ф;:рм,: с поапоиам 1; и источником .
x:
| название | год | авторы | номер документа |
|---|---|---|---|
| Океанографический буй | 1983 |
|
SU1102711A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2235294C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2234678C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ГОРИЗОНТАЛЬНО^Й СОСТАВЛЯЮЩЕЙ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 1970 |
|
SU278140A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ КРЕНА И ДИФФЕРЕНТА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2486098C1 |
| Навигационный буй с комплексной энергоустановкой | 2018 |
|
RU2672830C1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
fus.Z
