Изобретение относится к области приборостроения и, в частности, к устройствам для определения угла наклона к горизонту подвижных объектов, например судов на подводных крыльях.
Известна гировертикаль (см. Гировертикаль малогабаритная МГВ-5. Руководство по технической эксплуатации. ИСМЯ.402164.001 РЭ, аналог), предназначенная для определения углового положения судов на подводных крыльях относительно вертикали места, содержащая трехстепенной гироскоп в кардановом подвесе, снабженный электрической маятниковой коррекцией относительно продольной и поперечной осей, коррекционные моторы и стопорное устройство для обеспечения времени готовности при запуске гировертикали.
Недостатком гировертикали является ее сложность и невозможность ее нормальной эксплуатации на качающемся основании, каковым является судно на подводных крыльях, ввиду наличия требования после отключения электропитания в течение 5 минут изделие не переносить и не поворачивать.
Указанный недостаток частично устранен в маятниковом кренодифферентомере (см. Авторское свидетельство СССР №618286, кл. G01C 9/12, 1979, прототип), содержащем пространственный физический маятник, на осях подвеса которого установлены датчики углов крена и дифферента, а также датчики момента, управляемые через усилители от акселерометров и датчиков угловых скоростей, расположенных на маятнике.
Недостатком прототипа является его сложность.
Целью изобретения является упрощение конструкции устройства для определения углов крена и дифферента, снижение его веса и габаритов.
Поставленная цель достигается тем, что устройство для определения углов крена и дифферента содержит два акселерометра, два датчика угловой скорости и вычислительный модуль. При этом датчики расположены непосредственно на корпусе объекта, а вычислительный модуль вычисляет углы на основе комбинации низкочастотной и высокочастотной составляющих сигналов датчиков в продольной и поперечной плоскостях соответственно.
Функциональная схема предлагаемого устройства для определения угла наклона подвижного объекта относительно одной из двух идентичных осей приведена на чертеже.
Предлагаемое устройство на каждой оси содержит акселерометр 1, датчик угловой скорости 2 и вычислительный модуль 3.
Устройство работает следующим образом.
При статических углах наклона корпуса объекта акселерометр 1 измеряет составляющую ускорения силы тяжести и имеет передаточную функцию Kα·sinα, где α - угол наклона корпуса объекта, а Кα - крутизна выходного сигнала акселерометра 1. При малых углах наклона, что реально имеет место на судах на подводных крыльях с системой стабилизации углов крена и дифферента, передаточную функцию акселерометра 1 можно принять в виде Kα·α, и в этом качестве как датчик угла наклона акселерометр 1 используется в предлагаемом устройстве. Выходной сигнал акселерометра 1 поступает на первый вход вычислительного модуля 3, имеющий передаточную функцию 
Таким образом, формируется низкочастотная составляющая сигнала устройства определения угла наклона.
Для компенсации запаздывания выходного сигнала вычислительного модуля 3, возникающего вследствие фильтрации помехи, на второй вход вычислительного модуля 3 поступает сигнал датчика угловой скорости 2, имеющего передаточную функцию 

Передаточная функция предлагаемого устройства для определения углов наклона подвижных объектов относительно одной из двух идентичных осей, приведенного на чертеже, имеет вид:

при  передаточная функция принимает вид
передаточная функция принимает вид

Из передаточной функции (I) видно, что предлагаемое устройство измеряет только статические углы наклона объекта, полностью устраняет динамическую составляющую сигнала акселерометров, возникающие вследствие действия возмущений, например, при волнении моря.
При длительной циркуляции (развороте) судна на подводных крыльях на выходе предлагаемого устройства в канале крена формируется выходной сигнал, возникающий вследствие центробежной силы. Этот сигнал системой стабилизации судна воспринимается как ошибка стабилизации и формирует наклон судна во внутреннюю сторону разворота, обеспечивая тем самым координированный разворот.
Таким образом, предлагаемое устройство при более простой конструкции позволяет определять углы наклона подвижного объекта при действии возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
Изобретение относится к области приборостроения, в частности к устройствам для определения угла наклона к горизонту подвижных объектов. Устройство содержит два акселерометра и два датчика угловых скоростей, расположенных непосредственно на корпусе судна, и вычислительный модуль, вычисляющий углы наклона на основе комбинации низкочастотной и высокочастотной составляющих сигналов датчиков в продольной и поперечной плоскостях соответственно. Изобретение обеспечивает упрощение конструкции устройства, снижение его веса и габаритов. 1 ил.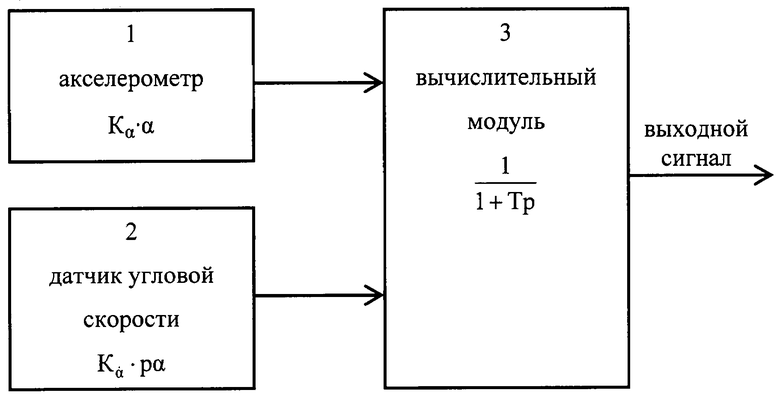
Устройство для определения углов крена и дифферента подвижных объектов, например судна на подводных крыльях, содержащее два акселерометра, два датчика угловых скоростей и два вычислительных модуля, отличающееся тем, что, с целью упрощения конструкции, датчики жестко связаны с корпусом подвижного объекта, а вычислительные модули вычисляют углы наклона на основе комбинации низкочастотной и высокочастотной составляющих сигналов датчиков в продольной и поперечной плоскостях соответственно.
| ЕР 1722239 А2, 15.11.2006 | |||
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| WO 00/36376 A1, 22.06.2000 | |||
| US 4318300 A, 09.03.1982 | |||
| Верньерное шкальное устройство | 1973 |
|
SU512563A1 |
| Маятниковый кренодифферентометр | 1977 |
|
SU678286A1 |

