Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении гироскопических приборов для систем стабилизации, наведения и топопривязки объектов наземной техники.
Известны способы определения углов продольного и поперечного наклонов различных объектов с помощью гироскопических вертикалей (гировертикалей) [1, с.170-171], которые заключаются в том, что с помощью гировертикали создают на объекте площадку, стабилизированную в плоскости горизонта, относительно которой с измерительных осей гировертикали, например, с помощью датчиков углов снимают информацию об углах наклонов.
Недостатком известных способов, связанных с использованием гировертикалей, является наличие дополнительной погрешности определения углов наклонов объекта из-за существования скоростной девиации и навигационной погрешности гировертикали вследствие суточного вращения Земли и перемещения объекта относительно Земли [1, с.178-179].
Известен способ определения углов продольного и поперечного наклонов с помощью гировертикали повышенной точности [1, с.191-195], свободный от указанного выше недостатка, заключающийся в том, что в схему гировертикали дополнительно вводят централь скорости, навигационный автомат и курсовую систему, вырабатывающие информацию соответственно о путевой скорости v, географической широте ϕ и географическом курсе А, по информации о которых с помощью счетно-решающих устройств формируют сигналы компенсации и по сформированным сигналам осуществляют компенсацию видимого ухода оси гироскопа гировертикали от вращения Земли и перемещения объекта относительно Земли.
Компенсация ухода оси гироскопа гировертикали в результате вращения Земли и перемещения объекта относительно Земли в известном способе, реализованном в гировертикали повышенной точности [1, с.191-195], осуществляется путем подачи от счетно-решающих устройств соответствующих сигналов на датчики моментов гироскопа гировертикали, а именно осуществляется приборная компенсация погрешностей.
В настоящее время в качестве счетно-решающих устройств широко применяются электронные вычислительные устройства (микроЭВМ), обеспечивающие цифровую обработку информации.
Для реализации приборной компенсации погрешностей при использовании в качестве счетно-решающих устройств микроЭВМ в состав гировертикали повышенной точности необходимо введение дополнительных устройств - цифроаналоговых преобразователей, усложняющих и увеличивающих стоимость гировертикали повышенной точности, что является недостатком известного способа.
В качестве прототипа изобретения принят способ определения продольного и поперечного наклонов с помощью гировертикали повышенной точности [1, с.191-195].
Изобретение направлено на снижение трудоемкости и стоимости изготовления при использовании в качестве счетно-решающих устройств микроЭВМ, повышение точности измерения углов наклонов при изменении углового положения гировертикали повышенной точности в азимуте.
Это достигается тем, что в известном способе определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности, включающем выработку информации о географической широте, выработку информации о географическом курсе, формирование по информации о географической широте и географическом курсе сигналов компенсации, компенсацию по сформированным сигналам видимого ухода оси гироскопа гировертикали от вращения Земли и измерение углов продольного и поперечного наклонов с помощью гировертикали, при формировании сигналов компенсации вычисляют преобразование углового положения измерительных осей гировертикали в горизонтальной системе координат, связанной с ее корпусом, от изменения углового положения гировертикали в азимуте в соответствии с выражениями:

где A0 - исходное азимутальное положение корпуса гировертикали;
Δ β 0, Δ ψ 0 - исходные угловые положения измерительных осей гировертикали в горизонтальной системе координат для азимутального положения A0;
A1 - текущее азимутальное положение корпуса гировертикали после изменения ее положения в азимуте,
а затем численно решают уравнения прецессии главной оси гироскопа гировертикали относительно горизонтальной плоскости в соответствии с выражениями:
где Δ β , Δ ψ - продольный и поперечный углы отклонения главной оси гироскопа гировертикали от направления истинной вертикали,
ε - крутизна коррекции гировертикали,
U - угловая скорость вращения Земли,
причем при решении выражений (2) в качестве начальных значений Δ β , Δ ψ используют значения Δ β 1, Δ ψ 1, вычисленные в соответствии с выражениями (1), а при компенсации полученные в результате решения выражений (2) значения Δ β , Δ ψ суммируют с измеренными углами продольного и поперечного наклонов.
В варианте способа определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности дополнительно к описанным выше действиям включаются: выработка информации о путевой скорости, формирование сигналов компенсации с использованием дополнительной информации о путевой скорости, дополнительная компенсация по сформированным сигналам видимого ухода оси гироскопа гировертикали от перемещения объекта относительно Земли, причем численно решаемые уравнения прецессии главной оси гироскопа гировертикали относительно горизонтальной плоскости принимают вид:

где v - скорость перемещения корпуса гировертикали по поверхности Земли,
R - радиус Земли,
g - ускорение свободного падения.
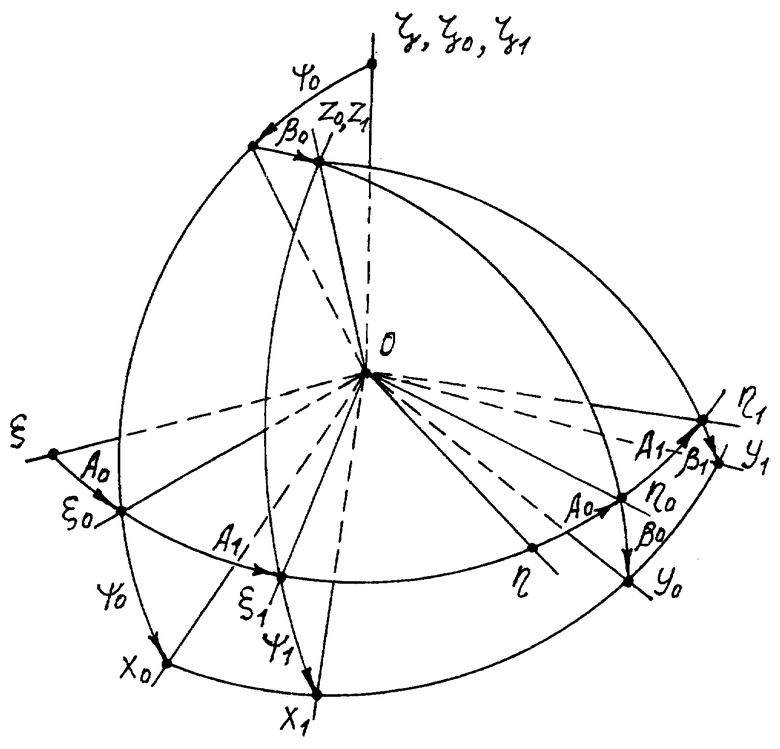
Реализация способа определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности поясняется чертежом, на котором представлена схема преобразований углового положения главной оси гироскопа гировертикали в географической системе координат при поворотах корпуса гировертикали по углу курса.
Реализация предлагаемого способа осуществляется следующим образом.
Гировертикаль повышенной точности, реализующая предлагаемый способ определения углов продольного и поперечного наклонов, содержит гировертикаль, средство для выработки угла географического курса - курсовую систему, средство для выработки информации о географической широте - навигационный автомат, в варианте реализации: средство для выработки информации о путевой скорости - централь скорости.
На подвижном объекте гировертикаль устанавливается так, что ось поворота наружной рамы карданова подвеса с датчиком угла параллельна продольной оси объекта, а ось поворота внутренней рамы с датчиком угла лежит в плоскости, содержащей поперечную ось объекта.
Курсовая система на подвижном объекте устанавливается так, что ее продольная ось параллельна продольной оси объекта.
После включения и истечения времени готовности курсовая система вырабатывает текущий угол географического курса А, навигационный автомат - текущее значение широты ϕ .
В виду того что установкой на подвижном объекте обеспечивается параллельность продольной оси курсовой системы и оси наружной рамы гировертикали, угол географического курса А дает информацию о положении измерительных осей гировертикали относительно направления меридиана.
В этом случае уравнение прецессии для гировертикали, покоящейся относительно Земли, в соответствии с [1, с.178] и установкой гировертикали на объекте без учета собственной скорости прецессии гировертикали можно представить в виде:

Выражения (4) определяют положение главной оси гироскопа гировертикали относительно направления истинной вертикали в результате прецессии от воздействия составляющей Ucosϕ угловой скорости вращения Земли при изменении углового положения А ее измерительных осей относительно направления меридиана.
В известном способе определения углов наклонов с помощью гировертикали повышенной точности [1] выработка сигналов компенсации осуществляется в аналоговом виде в соответствии с выражениями (4).
Для упрощения и снижения стоимости гировертикали повышенной точности, в которой в качестве счетно-решающих устройств используются микроЭВМ, в предлагаемом способе осуществляется алгоритмическая компенсация погрешностей гировертикали от ее уходов.
Пусть плоскость основания корпуса гировертикали перпендикулярна направлению истинной вертикали, а поворот корпуса гировертикали осуществляется вокруг направления истинной вертикали, тогда величины Δ β и Δ ψ - суть погрешности измерения углов продольного β и поперечного ψ наклонов от скоростной девиации гировертикали.
При развороте корпуса гировертикали в азимуте кроме прецессии в соответствии с выражениями (4) происходит преобразование углового положения главной оси гироскопа, а следовательно, и измерительных осей гировертикали в географической системе координат, относительно которой происходит измерение углов наклона.
Пусть Oξ η ζ - географическая система координат (см. чертеж); Oξ 0η 0ζ 0, Oξ 1η 1ζ 1 - горизонтальные системы координат, связанные с корпусом гировертикали в угловых положениях A0, A1; Ox0y0z0, Ox1y1z1 - системы координат, связанные с измерительными осями гировертикали в этих же положениях. При условии А0=0, A1=0 системы координат Оξ 0η 0ζ 0, Oξ 1η 1ζ 1 совпадают с системой координат Oξ η ζ .
Пусть в результате прецессии в соответствии с выражениями (4) при угловом положении А0 в азимуте главная ось гироскопа гировертикали заняла направление, характеризующееся угловым положением β 0 и ψ 0 в системе координат Оξ 0η 0ζ 0, связанной с корпусом гировертикали в угловом положении А0.
В положении главной оси гироскопа гировертикали β 0 и ψ 0 отключим коррекцию и будем осуществлять компенсацию видимого ухода главной оси гироскопа от собственной скорости прецессии и составляющей Ucosϕ , при этом корпус гировертикали покоится относительно земной поверхности.
Из-за свойства свободного гироскопа сохранять направление главной оси в инерциальном пространстве положение плоскости Оx0y0, задаваемой измерительными осями гировертикали, с точностью до погрешностей при указанных выше условиях остается неизменным относительно географической системы координат Oξ η ζ .
Пусть теперь корпус гировертикали развернут в азимуте в новое положение A1 в азимуте в системе координат Oξ η ζ вокруг оси Оζ .
В соответствии с чертежом в новой системе координат Oξ 1η 1ζ 1, связанной с корпусом в положении A1, положение главной оси гироскопа гировертикали, а следовательно, и ее измерительных осей, характеризуется угловыми координатами β 1 и ψ 1.
Аналитически описанное преобразование углового положения β 0 и ψ 0 в угловое положение β 1 и ψ 1 измерительных осей гировертикали при развороте ее корпуса в азимуте в обозначениях для погрешностей Δ β и Δ ψ определения углов наклонов можно представить как

В действительности при включенной коррекции при работе гировертикали изменение погрешностей определения углов наклонов происходит как вследствие процесса (4), так и процесса (5).
Для учета погрешностей определения углов наклонов в предлагаемом способе осуществляется формирование цифровых поправок путем численного решения выражений (4) и (5) в микроЭВМ.
Для этого после включения и истечения времени готовности при работе гировертикали повышенной точности с помощью курсовой системы измеряются текущее азимутальное положение корпуса гировертикали A1 и приращение (A1-А0), с помощью навигационного автомата вырабатывается текущее значение широты ϕ , а с помощью микроЭВМ рассчитываются значения Δ β 1 и Δ ψ 1, которые используются в качестве начальных условий при численном решении уравнений (4). Полученные в результате решения уравнений (4) значения поправок Δ β , Δ ψ суммируют с измеренными углами продольного и поперечного наклонов.
При перемещении гировертикали по земной поверхности возникают дополнительные скоростная и навигационная погрешности [1, с.178-179]. При этом в уравнения прецессии (4) должны быть введены дополнительные члены.
В соответствии с выражениями (6.13), (6.15) [1, с.179] аналитические выражения для установившихся значений указанных погрешностей при перемещении корпуса гировертикали по поверхности Земли со скоростью v в принятых по тексту обозначениях будут иметь вид:
 ;
;  ,
,
подстановка которых в (4) дает:

Предлагаемый способ по вариантам может быть реализован в навигационной системе, содержащей в своем составе вычислительное устройство (микроЭВМ), датчик скорости, установленный на оси колеса подвижного объекта, и систему самоориентирующуюся гироскопическую курсокреноуказания (ССГККУ) [2], или в самой ССГККУ при наличии в ее составе микроЭВМ.
ССГККУ обеспечивает выработку текущего значения угла географического курса А после завершения выполняемого автоматически самой ССГККУ процесса начального ориентирования, выработку текущих значений углов продольного β и поперечного ψ наклонов объекта на стоянке и в движении.
Текущее значение широты ϕ вырабатывается в навигационной системе при решении навигационных алгоритмов.
Выработка текущих значений углов продольного β и поперечного ψ наклонов объекта производиться путем добавления к измеренным углам продольного и поперечного наклонов поправок Δ β , Δ ψ , расчет которых осуществляется путем численного решения выражений (1) и (2) или (1) и (3) в вычислительном устройстве по представленному выше алгоритму.
Таким образом, предлагаемый способ за счет формирования поправок к измеряемым углам наклонов в цифровом виде путем численного решения аналитических зависимостей, учитывающих преобразование углового положения измерительных осей гировертикали относительно горизонтальной плоскости в системе координат, связанной с ее корпусом, и прецессию главной оси гироскопа гировертикали относительно горизонтальной плоскости, позволяет повысить точность определения углов наклонов при алгоритмической компенсации при изменении углового положения подвижного объекта в азимуте без усложнения и увеличения стоимости гировертикали повышенной точности.
Источники информации
1. Гироскопические системы. Гироскопические приборы и системы. Учеб./Д.С. Пельпор, И.А. Михалев, В.А. Бауман и др./Под ред. Д.С. Пельпора. - М.: Высш.шк. 1988. - 424 с.
2. Патент на изобретение РФ № 2124184, МПК 6 G 01 C 19/38. Система самоориентирующаяся гироскопическая курсокреноуказания /Верзунов Е.И., Королев В.В., Заморский А.В., Матвеев В.Г. Приоритет 15.12.96, Бюллетень № 36, 1998. - с.403.
Изобретение относится к измерительной технике и предназначено для систем стабилизации, наведения и управления, работающих на подвижных объектах. При определении углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности сигналы компенсации формируют в цифровом виде как цифровые поправки к измеренным углам наклона путем решения аналитических зависимостей, одновременно учитывающих процессы прецессии и преобразования углового положения измерительных осей гировертикали в системе координат, связанной с ее корпусом. Техническим результатом является снижение трудоемкости и стоимости изготовления, повышение точности измерения углов наклонов с помощью гировертикали повышенной точности, устранение влияния динамической погрешности, возникающей при изменении угла курса гировертикали. 2 с.п. ф-лы, 1 ил.

где А0 - исходное азимутальное положение корпуса гировертикали;
Δβ0, Δψ0 - исходные угловые положения измерительных осей гировертикали в горизонтальной системе координат для азимутального положения А0;
А1 - текущее азимутальное положение корпуса гировертикали после изменения ее положения в азимуте,
а затем численно решают уравнения прецессии главной оси гироскопа гировертикали относительно горизонтальной плоскости в соответствии с выражениями
где Δβ, Δψ - продольный и поперечный углы отклонения главной оси гироскопа гировертикали от направления истинной вертикали;
ε - крутизна коррекции гировертикали;
U - угловая скорость вращения Земли,
причем при решении выражений (2) в качестве начальных значений Δβ, Δψ используют значения Δβ1, Δψ1, вычисленные в соответствии с выражениями (1), а при компенсации полученные в результате решения выражений (2) значения Δβ, Δψ суммируют с измеренными углами продольного и поперечного наклонов.

где А0 - исходное азимутальное положение корпуса гировертикали;
Δβ0, Δψ0 - исходные угловые положения измерительных осей гировертикали в горизонтальной системе координат для азимутального положения А0;
А1 - текущее азимутальное положение корпуса гировертикали после изменения ее положения в азимуте,
а затем численно решают уравнения прецессии главной оси гироскопа гировертикали относительно горизонтальной плоскости в соответствии с выражениями

где Δβ, Δψ - продольный и поперечный углы отклонения главной оси гироскопа гировертикали от направления истинной вертикали;
ε - крутизна коррекции гировертикали;
U - угловая скорость вращения Земли;
v - скорость перемещения корпуса гировертикали по поверхности Земли;
R - радиус Земли;
g - ускорение свободного падения,
причем при решении выражений (2) в качестве начальных значений Δβ, Δψ используют значения Δβ1, Δψ1, вычисленные в соответствии с выражениями (1), а при компенсации полученные в результате решения выражений (2) значения Δβ, Δψ суммируют с измеренными углами продольного и поперечного наклонов.
| Гироскопические системы | |||
| Гироскопические приборы и системы./Ред | |||
| Д.С.Пельпора | |||
| - М.: Высшая школа, 1988, с.170, 171, 191-195 | |||
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| US 5416976 А, 23.05.1995. | |||

