Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении гироскопических приборов для систем стабилизации, наведения и топопривязки объектов наземной техники.
Известны способы определения углов продольного и поперечного наклонов различных объектов с помощью гироскопических вертикалей (гировертикалей) [1, с.170-171], которые заключаются в том, что с помощью гировертикали создают на объекте площадку, стабилизированную в плоскости горизонта, относительно которой с измерительных осей гировертикали, например, с помощью датчиков углов снимают информацию об углах наклонов.
Недостатком известных способов, связанных с использованием гировертикалей является наличие дополнительной погрешности определения углов наклонов объекта из-за существования скоростной девиации и навигационной погрешности гировертикали вследствие суточного вращения Земли и перемещения объекта относительно Земли [1, с.178-179].
Известен способ определения углов продольного и поперечного наклонов с помощью гировертикали повышенной точности [1, с.191-195], свободный от указанного выше недостатка, заключающийся в том, что в схему гировертикали дополнительно вводят централь скорости, навигационный автомат и курсовую систему, вырабатывающие информацию соответственно о путевой скорости v, географической широте ϕ и географическом курсе А, по информации о которых с помощью счетно-решающих устройств формируют сигналы компенсации, и по сформированным сигналам осуществляют компенсацию видимого ухода оси гироскопа гировертикали от вращения Земли и перемещения объекта относительно Земли.
Недостатком известного способа определения углов наклонов с помощью гировертикали повышенной точности является снижение точности определения углов наклонов при наличии погрешности (смещения) (-Δ А) определения угла географического курса А курсовой системой, при наличии погрешностей (смещения) (-Δ β 0), (-Δ ψ 0) определения углов наклонов в результате невыставки датчиков углов, установленных на измерительных осях гировертикали, погрешностей Δ β 1, Δ ψ 1 невыставки датчиков горизонта гировертикали, возникающих в результате изготовления и сборки гировертикали повышенной точности.
Измерение угла географического курса на объекте, как правило, включает в себя две операции: начальное ориентирование и дальнейшее хранение направления в курсовой системе. Начальное ориентирование выполняется обычно с помощью отдельного прибора - гирокомпаса, входящего в состав курсовой системы. При условии точного хранения направления курсовой системой ошибка определения угла географического курса в основном определяется смещением угла географического курса в результате начального ориентирования.
Компенсация ухода оси гироскопа гировертикали в результате вращения Земли и перемещения объекта относительно Земли в известном способе, реализованном в гировертикали повышенной точности [1, с.191-195], осуществляется путем подачи от счетно-решающих устройств соответствующих сигналов на датчики моментов гироскопа гировертикали, а именно, осуществляется приборная компенсация погрешностей.
В настоящее время в качестве счетно-решающих устройств широко применяются электронные вычислительные устройства (микроЭВМ), обеспечивающие цифровую обработку информации.
Для реализации приборной компенсации погрешностей при использовании в качестве счетно-решающих устройств микроЭВМ в состав гировертикали повышенной точности необходимо введение дополнительных устройств - цифроаналоговых преобразователей, что усложняет и повышает стоимость гировертикали повышенной точности.
В качестве прототипа изобретения принят способ определения продольного и поперечного наклонов с помощью гировертикали повышенной точности [1, с.191-195].
Изобретение направлено на снижение трудоемкости и стоимости изготовления при использовании в качестве счетно-решающих устройств микроЭВМ, повышение точности измерения углов наклонов при наличии погрешностей, связанных с изготовлением и сборкой гировертикали повышенной точности.
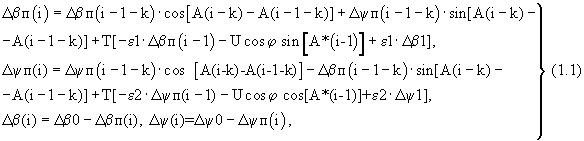
Это достигается тем, что в известном способе определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности, включающем выработку информации о географической широте ϕ , выработку информации о географическом курсе А, формирование по информации о географической широте ϕ и географическом курсе А сигналов компенсации, компенсацию по сформированным сигналам видимого ухода оси гироскопа гировертикали от вращения Земли и измерение углов продольного β и поперечного ψ наклонов с помощью гировертикали, перед формированием сигналов компенсации осуществляют настройку гировертикали повышенной точности, заключающуюся в том, что определяют Δ А - поправку на смещение угла географического курса А, Δ β 0, Δ ψ 0 - поправки на смещение продольного и поперечного датчиков угла гировертикали, (-Δ β 1), (-Δ ψ 1) - поправки на смещение от продольной и поперечной систем коррекции гировертикали, ε 1, ε 2 - значения коэффициентов крутизны коррекции гировертикали по углу продольного β и поперечного ψ наклонов соответственно, значения поправок и коэффициентов вводят и (или) хранят в запоминающем устройстве, а сигналы компенсации формируют в цифровом виде как цифровые поправки Δ β , Δ ψ к измеренным углам наклона β и ψ , причем при вычислении поправок решают выражения:
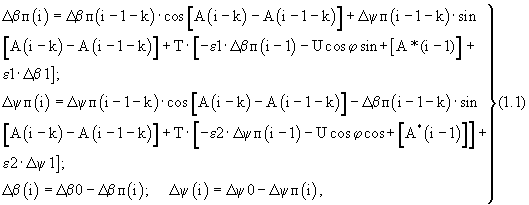
где k=1;
Т - период цикла вычислений;
(-Δ β п(i)), (-Δ ψ п(i)) - поправки в i-й момент времени на скоростную девиацию и смещение от продольной и поперечной систем коррекции с учетом преобразования углового положения главной оси гироскопа гировертикали в географической системе координат;
A* (i-1)=A(i-1)+Δ А - значение угла географического курса в (i-1)-й момент времени с учетом поправки Δ А;
Δ β (i), Δ ψ (i) - поправки к измеренным гировертикалью углам наклона β и ψ в i-й момент времени,
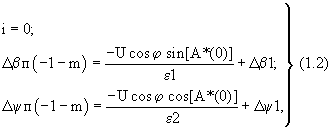
причем в момент начала вычислений по выражениям (1.1) устанавливают начальные значения:
i=0;
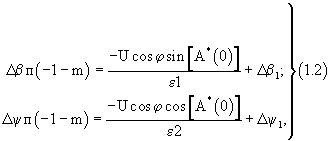
где m=0,1.
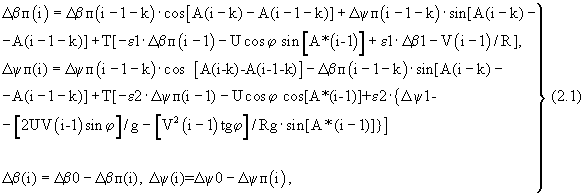
В варианте способа определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности, дополнительно включающем выработку информации о путевой скорости v, формирование сигналов компенсации с использованием дополнительной информации о путевой скорости v, дополнительную компенсацию по сформированным сигналам видимого ухода оси гироскопа гировертикали от перемещения объекта относительно Земли после указанной выше настройки гировертикали повышенной точности цифровые поправки Δ β , Δ ψ к измеренным углам наклона β и ψ формируют путем решения выражений
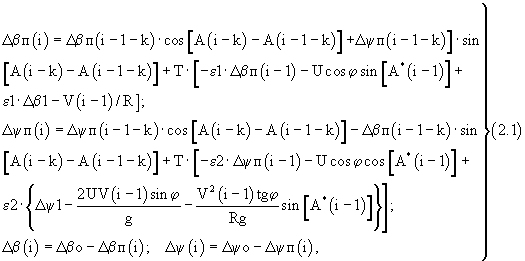
где k=1 и дополнительно к обозначениям (1.1)
V(i-1) - путевая скорость объекта в (i-1)-й момент времени;
R - радиус Земли;
g - ускорение свободного падения,
причем в момент начала вычислений по выражениям (2.2) устанавливают начальные значения:
i=0;
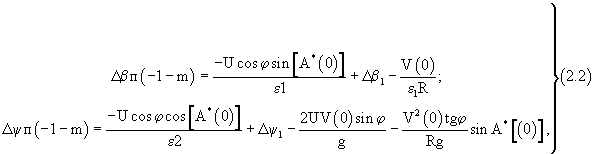
где m=0,1.
Для сокращения количества переменных в предлагаемых выражениях (1.1), (1.2), (2.1), (2.2) может быть принято k=0, m=0.
Для исключения появления дополнительной погрешности гировертикали повышенной точности в случае, если на момент формирования сигналов компенсации не известны достоверные значения географической широты ϕ и (или) географического курса А, в качестве поправок к углам продольного и поперечного наклонов используют значения смещений продольного и поперечного датчиков углов гировертикали (-Δ β 0), (-Δ ψ 0) или дополнительно значения смещений от систем коррекции Δ β 1, Δ ψ1.
На этапе изготовления гировертикали повышенной точности путем соответствующих регулировок курсовой системы и гировертикали могут обеспечиваться нулевые значения всех или некоторых поправок.
В этом случае в запоминающее устройство вводят и хранят лишь ненулевые поправки, нулевые не используют, а с помощью счетно-решающих устройств реализуют одну из форм зависимостей (1.1), (1.2), (2.1), (2.2), в которых отсутствуют нулевые члены при неиспользуемых поправках, что сокращает объем дополнительного операторского обслуживания гировертикали повышенной точности и повышает ее быстродействие за счет сокращения объема математических операций, производимых вычислительным устройством.
Аналогично в результате изготовления гировертикали повышенной точности может обеспечиваться равенство крутизны коррекции гировертикали по углам продольного и поперечного наклонов ε 1=ε 2.
В этом случае аналогично для сокращения объема операторского обслуживания и повышения быстродействия с помощью счетно-решающих устройств реализуют форму зависимостей (1.1), (1.2), (2.1), (2.2), в которой ε 1=ε 2=ε , где ε - крутизна коррекции гировертикали, и вместо двух значений ε 1 и ε 2 в запоминающем устройстве хранят одно значение ε .
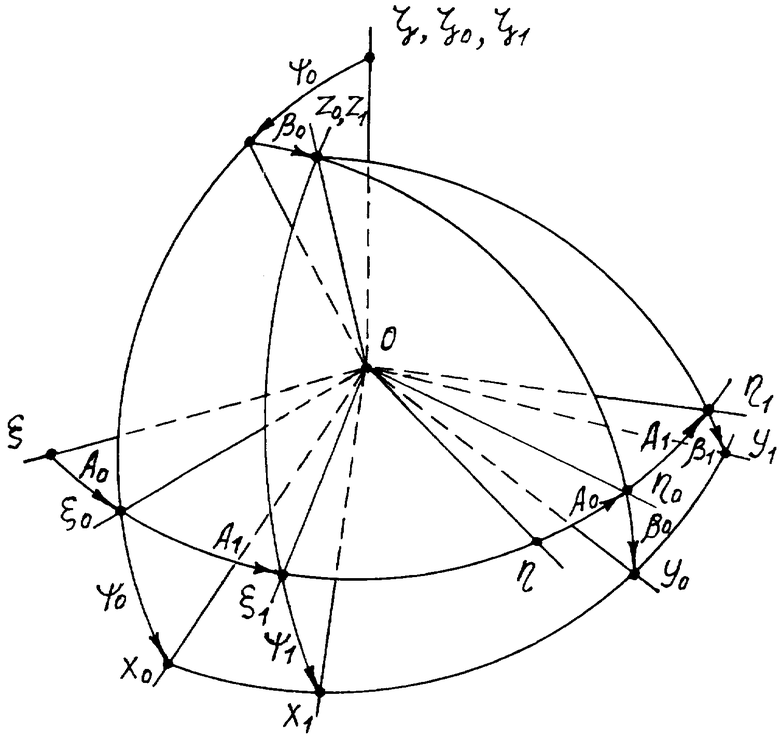
Реализация способа определения углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности поясняется чертежом, на котором представлена схема преобразований углового положения главной оси гироскопа гировертикали в географической системе координат при поворотах корпуса гировертикали по углу курса.
Реализация предлагаемого способа осуществляется следующим образом.
Гировертикаль повышенной точности, реализующая предлагаемый способ определения углов продольного и поперечного наклонов, содержит гировертикаль, средство для выработки угла географического курса - курсовую систему, средство для выработки информации о географической широте - навигационный автомат, в варианте реализации: средство для выработки информации о путевой скорости - централь скорости.
На подвижном объекте гировертикаль устанавливается так, что ось поворота наружной рамы карданова подвеса с датчиком угла параллельна продольной оси объекта, а ось поворота средней рамы с датчиком угла лежит в плоскости, содержащей поперечную ось объекта.
Курсовая система на подвижном объекте устанавливается так, что ее продольная ось параллельна продольной оси объекта.
После включения и истечения времени готовности курсовая система вырабатывает текущий угол географического курса А, навигационный автомат - текущее значение широты ϕ .
Ввиду того, что установкой на подвижном объекте обеспечивается параллельность продольной оси курсовой системы и оси наружной рамы гировертикали, угол географического курса А дает информацию о положении измерительных осей гировертикали относительно направления меридиана.
В этом случае уравнение прецессии для гировертикали, покоящейся относительно Земли, в соответствии с [1, с.178] и установкой гировертикали на объекте, с учетом наличия погрешностей (-Δ А), Δ β 1, Δ ψ 1, без учета собственной скорости прецессии гировертикали можно представить в виде:
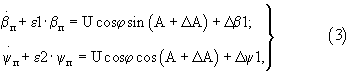
где β п, ψ п - продольный и поперечный углы отклонения главной оси гироскопа гировертикали от направления истинной вертикали.
Для упрощения и снижения стоимости гировертикали повышенной точности, в которой в качестве счетно-решающих устройств используются микроЭВМ, в предлагаемом способе предполагается осуществление алгоритмической компенсации погрешностей гировертикали от ее уходов.
Решение выражений (3) в реальном времени с помощью микроЭВМ возможно путем использования их дискретного аналога, который в простейшем случае имеет вид:

или после преобразования:

Выражения (4) определяют положение главной оси гироскопа гировертикали относительно направления истинной вертикали в результате прецессии от воздействия составляющей Ucosϕ угловой скорости вращения Земли при изменении углового положения А ее измерительных осей относительно направления меридиана в i - момент времени.
Пусть плоскость основания корпуса гировертикали перпендикулярна направлению истинной вертикали, а поворот корпуса гировертикали осуществляется вокруг направления истинной вертикали, тогда величины β п и ψ п суть погрешности Δ β п и Δ ψ п измерения углов продольного β и поперечного ψ наклонов от скоростной девиации и смещения при измерении углов наклонов от систем коррекции.
В обозначениях погрешностей Δ β п и Δ ψ п выражение (4) имеет вид
После завершения процесса начальной выставки по истечении времени готовности установившиеся значения погрешностей определения углов наклонов будут соответствовать условию k· Т → ∞ , где k=i, k· Т - время.
Моментом начала вычислений по выражениям (5) является момент i=0, на который известны текущий угол географического курса А и значение широты ϕ . Для момента i=0 и условия k· Т→ ∞ , и при условии, что A=const, начальные погрешности гировертикали в соответствии с (5) равны
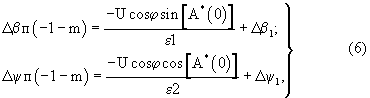
где m=0
Значения (6) являются начальными значениями при расчете по выражениям (5) в момент i=0.
При развороте корпуса гировертикали в азимуте кроме прецессии в соответствии с формулами (3) происходит преобразование углового положения главной оси гироскопа, а следовательно, и измерительных осей гировертикали в географической системе координат, относительно которой происходит измерение углов наклона.
Пусть Oξ η ζ - географическая система координат (см.чертеж), Oξ 0η 0ζ 0; Oξ 1η 1ζ 1 - системы координат, связанные с корпусом гировертикали в угловых положениях А0, А1, Ox0y0z0, Ox1y1z1 - системы координат, связанные с измерительными осями гировертикали в этих же положениях. При условии А0=0, A1=0 системы координат Oξ0η 0ζ 0, Oξ 1η 1ζ 1 совпадают с системой координат Oξ η ζ .
Пусть в результате прецессии в соответствии с выражениями (3) при угловом положении А0 в азимуте главная ось гироскопа гировертикали заняла направление, характеризующееся угловым положением β 0 и ψ 0 в системе координат Oξ0η0ζ0. связанной с корпусом гировертикали в угловом положении А0.
В положении главной оси гироскопа гировертикали β 0 и ψ 0 отключим коррекцию и будем осуществлять компенсацию видимого ухода главной оси гироскопа от собственной скорости прецессии и составляющей Ucosϕ , при этом корпус гировертикали покоится относительно земной поверхности.
Из-за свойства свободного гироскопа сохранять направление главной оси в инерциальном пространстве положение плоскости Ох0у0, задаваемой измерительными осями гировертикали, с точностью до погрешностей при указанных выше условиях остается неизменным относительно географической системы координат Oξ η ζ .
Пусть теперь корпус гировертикали развернут в азимуте в новое положение A1 в азимуте в системе координат Oξ η ζ , вокруг оси Oζ .
В соответствии с чертежом в новой системе координат Oξ 1η 1ζ 1, связанной с корпусом в положении A1, положение главной оси гироскопа гировертикали, а следовательно, и ее измерительных осей, характеризуется угловыми координатами β 1 и ψ1.
Аналитически описанное преобразование углового положения β 0 и ψ 0 в угловое положение β 1 и ψ 1 измерительных осей гировертикали при развороте ее корпуса в азимуте в обозначениях для погрешностей Δ β пi и Δ ψ п i определения углов наклонов можно представить как

В действительности при включенной коррекции при работе гировертикали изменение погрешностей определения углов наклонов происходит совместно как вследствие процесса (3), так и процесса (7).
Как следует из выражений, изменение погрешностей определения углов наклонов в результате прецессии (3) от скоростной девиации происходит с некоторой постоянной времени, в то время как изменение погрешностей в результате преобразования (7) - мгновенно при изменении угла курса.
Формально, по аналогии с процессами (3) и (7), дискретный аналог (5) выражений (3) может быть также разбит на “мгновенную” (слагаемые Δ β п(i-i) и Δ ψ п(i-1) и “инерционную” (слагаемые Т[-ε1·Δβ п(i-1)-Ucosϕ sin[A* (i)]+Δ β 1] и Т[-ε 2· Δ ψ п(i-1)-Ucosϕ cos[A* (i)]+Δ ψ 1)]) части.
Дискретный аналог суперпозиции процессов (3) и (7) в этом случае может быть получен подстановкой в “мгновенную” часть выражений (5) “мгновенного” преобразования (7) в дискретной записи:

что дает:
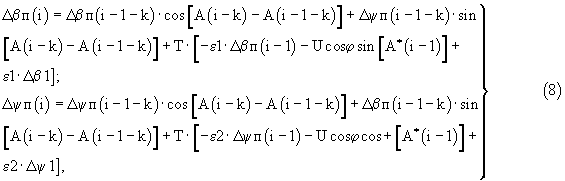
где k=1.
При перемещении гировертикали по земной поверхности возникают дополнительные скоростная и навигационная погрешности [1, с.178-179]. При этом в уравнения прецессии (3) должны быть введены дополнительные члены.
В соответствии с выражениями [1, с.179, формулы (6.13), (6.15)] аналитические выражения для установившихся значений указанных погрешностей при перемещении корпуса гировертикали по поверхности Земли со скоростью v в принятых по тексту обозначениях будут иметь вид:

В этом случае с учетом составляющих (9) уравнения прецессии главной оси для гировертикали, движущейся относительно земной поверхности со скоростью v, можно представить в виде:

Дискретный аналог для выражений (10) с учетом (7) по аналогии с (8) может быть представлен в виде:
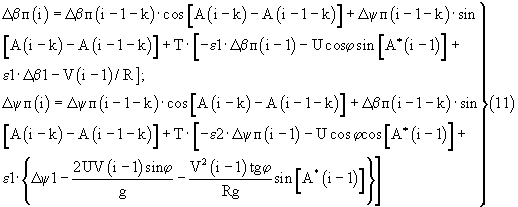
где k=1.
В выражениях (8) и (11) наряду с переменными Δ β п(i-1), Δ ψ п(i-1) присутствуют переменные Δ β п(i-2) и Δ ψ п(i-2), поэтому для начала решения выражений (8) и (11) необходимо два начальных значения (6) при m=0 и m=1, причем при вычислении начальных значений для выражений (11) выражения (6) должны быть дополнены составляющими (9) для момента i=0, в которых v=v(0).
Для сокращения количества переменных, участвующих в расчетах, при условии малости величины Т без значимого снижения точности вычислений по выражениям (8) и (11) можно принять k=0.
Невыставка продольного и поперечного датчиков угла гировертикали приводит к формированию статических погрешностей определения углов продольного β и поперечного ψ наклонов, учет которых в предлагаемом способе осуществляется с использованием постоянных поправок Δ β 0 и Δ ψ 0.
Суммарные значения поправок к измеренным углам наклона β и ψ в i-й момент времени с учетом невыставки датчиков угла гировертикали равны
Δ β (i)=Δ β 0-Δ β п(i); Δ ψ (i)=Δ ψ 0-Δ ψ п(i)
Достоверные значения поправок Δ β п(i), Δ ψ п(i) могут быть определены только при условии, если на момент начала вычислений (8), (11) известны достоверные значения угла курса А и широты ϕ .
С момента запуска гировертикали повышенной точности достоверные значения угла курса А и широты ϕ вырабатываются за вполне определенное время, определяемое алгоритмами работы курсовой системы и навигационного автомата, и могут быть известны значительно позднее достижения времени готовности гировертикали к измерению углов наклонов.
В этом случае для сохранения необходимой точности определения углов наклонов гировертикалью повышенной точности до момента выработки достоверных значений угла курса А и широты ϕ поправки Δ β п(i), Δ ψ п(i) не определяют, а компенсируют лишь статическую часть погрешностей поправками
Δ β (i)=Δ β 0; Δ ψ (i)= Δ ψ 0,
или с учетом смещения датчиков горизонта гировертикали
Δ β (i)=Δ β 0+Δ β 1; Δ ψ п(i)=Δ ψ о+Δ ψ 1
В частных случаях изготовления гировертикали повышенной точности могут быть получены нулевые значения всех или нескольких поправок Δ А, Δ β 0, Δ β 1, Δ ψ 0 или Δ ψ 1, а также равенство крутизны коррекции гировертикали по углам продольного и поперечного наклонов ε 1=ε 2.
В этом случае реализуют одну из форм зависимостей (1.1), (1.2), (2.1), (2.2), в которых отсутствуют нулевые члены при неиспользуемых поправках, а ε 1=ε 2=ε , где ε - крутизна коррекции гировертикали.
Предлагаемый способ может быть реализован в навигационной системе, содержащей в своем составе вычислительное устройство (микроЭВМ), датчик скорости, установленный на оси колеса подвижного объекта, и систему самоориентирующуюся гироскопическую курсокреноуказания (ССГККУ) [2], или в самой ССГККУ при наличии в ее составе микроЭВМ.
ССГККУ обеспечивает выработку текущего значения угла географического курса А после завершения выполняемого автоматически самой ССГККУ процесса начального ориентирования с учетом поправки Δ А, выработку текущих значений углов продольного β и поперечного ψ наклонов объекта на стоянке и в движении с учетом поправок.
Текущее значение широты ϕ вырабатывается в навигационной системе при решении навигационных алгоритмов.
Выработка текущих значений углов продольного β и поперечного ψ наклонов объекта производится с учетом поправок Δ β (i), Δ ψ (i), расчет которых в реальном времени реализован с помощью вычислительного устройства по выражениям (1.1) или (2.1).
Таким образом, предлагаемый способ за счет предварительной настройки гировертикали повышенной точности и последующего формирования поправок в цифровом виде путем решения в реальном времени дискретных выражений, одновременно учитывающих процессы прецессии и преобразования углового положения измерительных осей гировертикали в системе координат, связанной с ее корпусом, позволяет повысить точность определения углов наклонов без усложнения гировертикали повышенной точности.
Библиографические данные
1. Гироскопические системы. Гироскопические приборы и системы. Учеб. / Д.С. Пельпор, И.А. Михалев, В.А. Бауман и др.; Под ред. Д.С. Пельпора. - М.: Высш. шк., 1988. – 424 с.
2. Патент на изобретение РФ №2124184, МПК 6 G 01 C 19/38. Система самоориентирующаяся гироскопическая курсокреноуказания /Верзунов Е.И., Королев В.В., Заморский А.В., Матвеев В.Г. Приоритет 15.12.96. Бюл. №36, 1998. - с.403.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2235294C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ КОРРЕКЦИИ АНАЛИТИЧЕСКИХ ГИРОВЕРТИКАЛЕЙ УСЕЧЕННОГО СОСТАВА | 2002 |
|
RU2253091C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2256879C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
Изобретение относится к гироскопической технике и может быть использовано в измерительных системах и системах управления подвижных объектов. Сущность изобретения: при определении углов продольного и поперечного наклонов подвижного объекта с помощью гировертикали повышенной точности с использованием сигналов компенсации, перед формированием сигналов компенсации осуществляют настройку гировертикали. Настройка заключается в определении поправок на смещение угла географического курса, смещение продольного и поперечного датчиков угла, смещение продольной и поперечной систем коррекции гировертикали, определении значений коэффициентов крутизны коррекции по продольному и поперечному углу. Значения поправок и коэффициентов вводят и (или) хранят в запоминающем устройстве, а сигналы компенсации формируют в цифровом виде как поправки к измеренным углам наклона путем решения аналитических зависимостей. Технический результат - повышение точности при снижении трудоемкости и стоимости изготовления. 2 н. и 5 з.п. ф-лы, 1 ил.
где k=1;
Т- период цикла вычислений;
 поправки в i-й момент времени на скоростную девиацию и смещение от системы коррекции гировертикали с учетом преобразования углового положения главной оси гироскопа гировертикали в географической системе координат;
поправки в i-й момент времени на скоростную девиацию и смещение от системы коррекции гировертикали с учетом преобразования углового положения главной оси гироскопа гировертикали в географической системе координат;
А*(i-1)=A(i-1)+ΔA - значение угла географического курса в (i-1)-й момент времени с учетом поправки ΔА;
Δβ(i), Δψ(i) - поправки к измеренным гировертикалью углам наклона β и Ψ в i-й момент времени,
причем, в момент начала вычислений по выражениям (1.1) устанавливают начальные значения
где m=0; 1.
где k=1 и дополнительно к обозначениям (1.1):
V(i-1) - путевая скорость объекта в (i-1)-й момент времени;
R - радиус Земли;
g - ускорение свободного падения,
причем, в момент начала вычислений по выражениям (2.1) устанавливают начальные значения
где m=0; 1.
Δβ=Δβ0; Δψ=Δψ0.
Δβ=Δβ0+Δβ1; Δψ=Δψ0+ψ1.
| Пельпор Д.С | |||
| и др | |||
| Гироскопические системы | |||
| - М.: Высшая школа, 1988, с.191-195.RU 2124184 С1, 27.12.1998.RU 2165074 С1, 10.04.2001.RU 2171450 С1, 27.07.2001.RU 2192622 С1, 10.11.2002.US 3455172, 15.07.1969.US 4387513 А, 14.07.1983.DE 19852490 А1, 31.05.2000. |

