Предлагаемый механизм для транспортирования обуви при затяжке не представляет самостоятельной .машины, а является лишь дополнением известной затяжной машины.
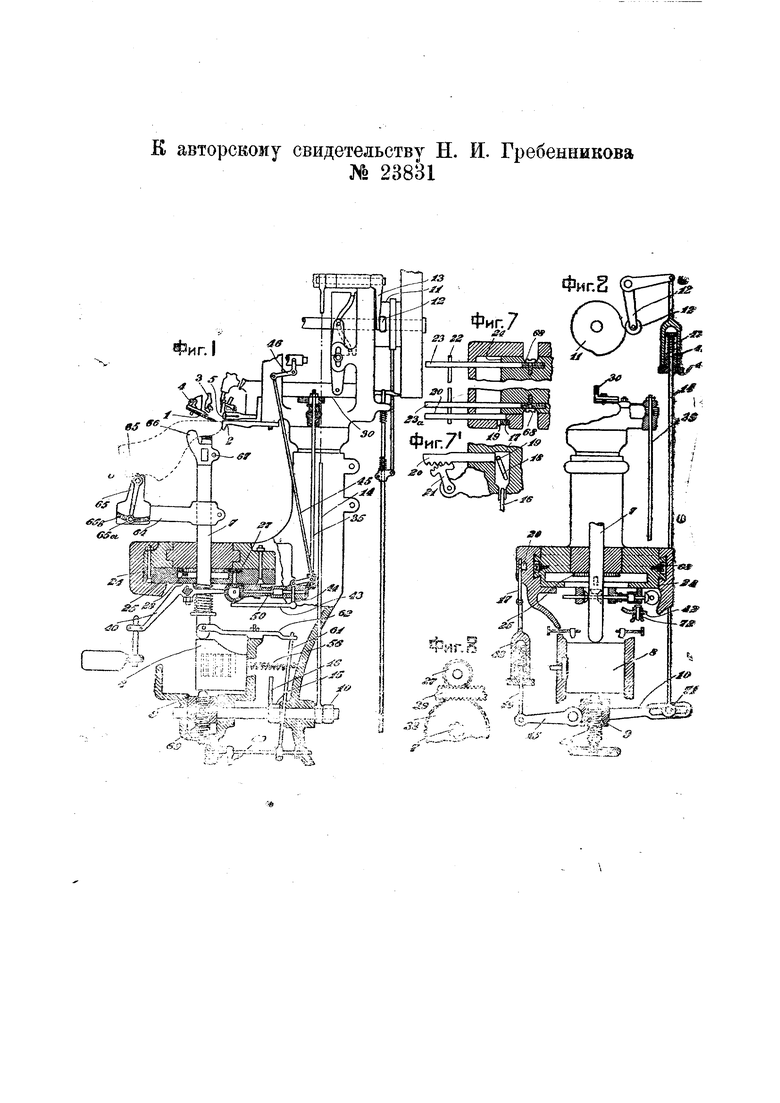
На чертеже фиг. 1-изображает вид механизма сбоку; фиг. 2-вид его спереди; фиг. 3-вид спереди механизма, получающего движение от ползуна тексового патрона для поворачивающего механизма; фиг. 4-вид этого механизма сверху; фиг. 5-то же, вид спереди; фиг, 6-то же, вид сверху; фиг. 7-вид сверху и сбоку механизма для движения вперед и назад основания поворачивающего механизма; фиг. 8-схематическое изображение принципа действия второго варианта конструкции поворачивающего мехапизма; фиг. 9-вид сбоку механизма для опускания и поднимания щтуцера в момент снятия и надевания ботинка; фиг. 10-вид спереди этого механизма: фиг. 11-вид сверху механизма для автоматической остановки машины; фиг. 12-вид спереди этого механизма; фиг. 13-вид сбоку видоизмененного механизма для поднимания и опускания штуцера; фиг. 14-то же, вид спереди. В предлагаемом механизме головка его такая же, как и у обыкновенных затяжных машин, лишь с некоторыми изменениями. Ботинок при затяжке имеет
движения: вверх, перед моментом охватывания клещами товара и забивкой текса, и возвращение в первоначальное положение (вниз), с одновременным поворачиванием в сторону на определенный угол для забивки очередного текса.. При этом движение вверх составляется из движения вертикального-вверх и горизонтального-вперед, так что движение ботинка вверх получается под некоторым углом. Такое движение нужно для лучшей хватки клещами товара н для более плотного прии(атия носка к подпатронной пластинке. В конце nej) вого движения ботинок прижимается в носке к упору 1 и подпатронной пластинке 2 и в этом положении находится неподвижно все время работы клещей 3,, ножевого аппарата 4 и тексового патрона 5 до момента окончания забивки текса, производимой молотковым аппаратом. При возвращении молотка и тексового патрона в первоначальное положение ботинок опускается вниз и поворачивается в сторону. В конце этого движения все части механизма находятся в исходном положении, после чего все движения повторяются в вышеописанном порядке.
Ботинок укрепляется на штуцере 6,, (фиг. 1), смонтированном на стержне 7. Нижний конец стержня 7 давит на ynopg,
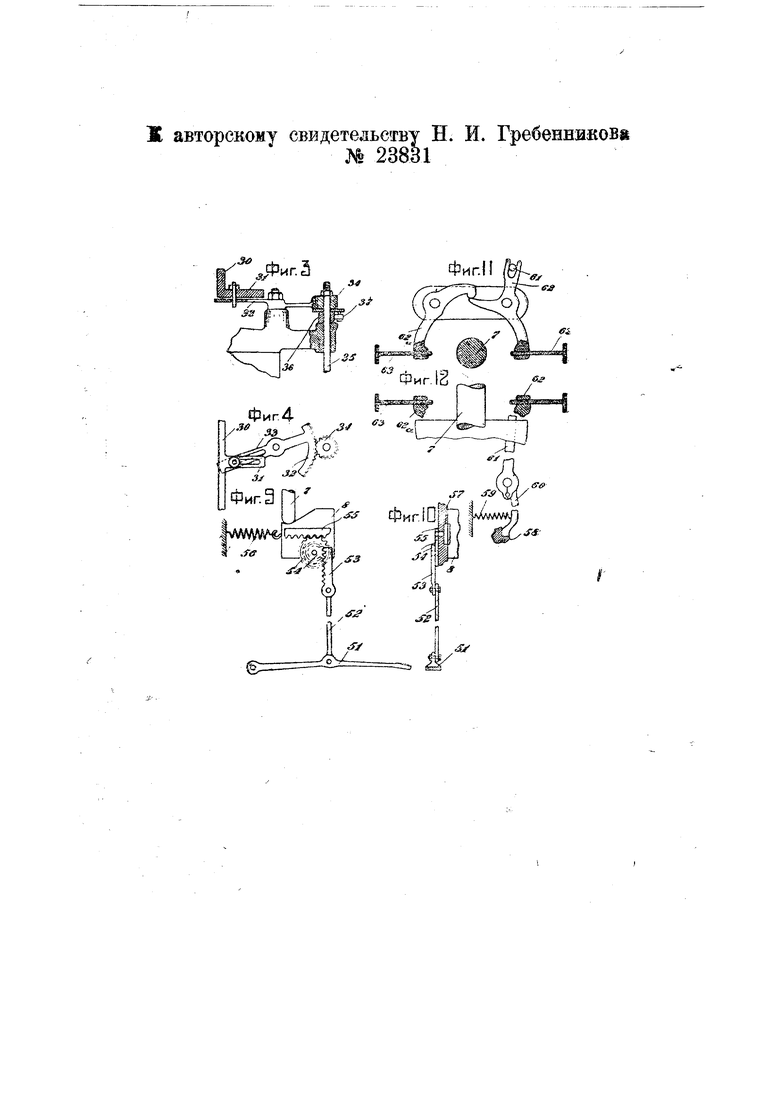
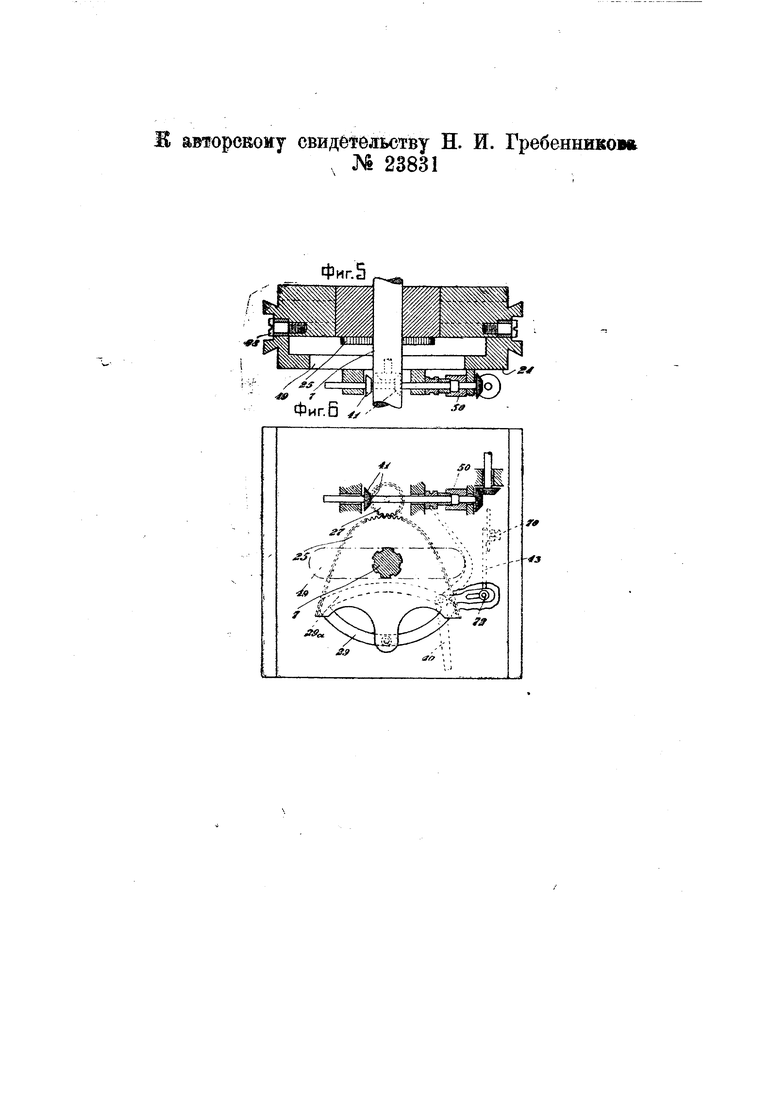
тя который при работе действует конец рычага 9, связанного осью с рычагом 10. .При вращении эксцентрика 11 он выпуклой кривой своей поверхности заставляет ролик 12 и рычаг 13 отходить в сторону, тем самым поднимал при помощи тяги 14 плечо рычага 10 и, следогвательно, конец рычага 9. Это движение последовательно передается через упор 8, стержень 7 и илтуцер 6 ботинку, который и прижимается к упору 1. Движе шю вверх придается характер движения зюд углом: рычаг 15 (фиг. 2) связан осью с рычагом 10, при движении которого вверх, сам опускается вниз и при по-мощи тяги 16 опускается ползун 17 с вырезом 18. В этот вырез входит па-лец 19 (фиг. 7) зубчатой рейки 20, находящейся в зацеплении с зубчатым -сегментом 21, который, в свою очередь, связан осью 22 с зубчатыми рейками 23 и 23а, неподвижно прикре.пленными к салазкам 24 поворачивающего механизма. Таким образом, дви-жение ползуна 17 вверх и вниз пере..дается салазкам 24, движущимся вперед и назад. За этим происходят движения .клещей, ножевого аппарата и забивка текса. При дальнейщем вращении эк-сцентрика 11, ролик 12 рычага 13 отходит с кривой поверхности эксцентрика больщего радиуса на меньишй. Вслед-ствие этого, все части, поддерживавщие штуцер, а вместе с ними и ботинок, юпускают-ся вниз. В промежутке времени ют начала до конца дви-жения ботинка :вниз происходит также поворот его в сторону. Фигурная шестерня 25 поворачивающего механизма (фиг. 5) находится в постоянном зацеплении (помощью шпошок) со стержнем 7 так, что он может свободно в ней передвигаться вверх И вниз. Стержень 7 проходит в ползуне 26, могущем двигаться вправо и :влево в направляющих пазах салазок 24, в зависимости от затяжки правой или .левой стороны носка. Шестерня 27 по..лучает движение от обратного хода ползуна тексового патрона. Для этого у :ползуна 30 (фиг. 3 и 4) имеется отросток 31 с продольным вырезом, в которрм может закрепляться палец, свободно входящий нижним концом своим :в продольный вырез плеча рычага 33, плечо которого оканчивается
зубчатым сегментом 32, находящимся в зацеплении с шестерней 34, свободно сидящей на вертикальном валу 35. Под щестерней 34 находится храповое колесо 36, составляющее одно целое с валом 35. Собачка 37, бегающая по храповому колесу, находится на шестерне 34. Таким образом, движение взад и вперед ползуна тексового патрона передается шестерне 34 с укрепленной собачкой 37, которая при вращении в одну сторону шестерни свободно перескакивает с зубца на зубец храпового колеса, а при вращении в другую сторону-захватывает зубец его и поворачивается с ним, приводя во вращение вал 35, который, в свою очередь, передает это движение, через ряд шестеренок, шестерне 27.
Второй вариант (фиг. 8) зацепленияшестерен в поворачивающем механизме отличается от первого только тем, что вместо фигурной шерстерни 25 на стержень 7 насаживается цилиндрическая шестерня 38 и между ней и шестеренкой 27-а находится зубчатая рейка 39, которая вставляется в соответствующие пазы в салазках 24. При вращении шестеренки 27 рейка 39 движется и зубьями другой стороны производит вращен ие и передвижение в сторону шестерни 38, когда ролик 28 вошел в продольный направляющий паз 29 (фиг. 6).
Рычаг 40 и шестеренки 41 служат для переключения и включения шестеренки 27.
Установка клещей и включение соответствующего ножа при затяжке правой или левой стороны носка, производятся автоматически при переводе рычага 40, включающего вращение штуцера в соответствии с движением клещей. Для этого рычаг- 40 снабжен плечом 42, подвижно соединенным тягой 43 с рычагом 44, который, через тягу 45 и рычаг 46 (фиг. 1), передает движение муфте, переводящей клещи, и пластинке, переключающей ножи. При среднем положении рычага 40, когда шестерня 27 выключена, клещи могут работать без выворота и ножи включены.
Амортизаторы 47 и 48 (фиг. 2) служат для смягчения нажима ботинка: первый-к упору 1 и второй-к подпатронной пластинке 2. Кроме того.
амортизатор 48 при затяжке носка, | ограниченного наименее правильными i кривыми. линиями, восполняет некото- j рую неточность поворота штуцера в соответствии с округленностью линий носка (за счет сжатия и растяжения его пружины). Винт 47а позволяет регулировать натяжение пружины 476. Продольный вырез 49 (фиг. 5) в салазках 24 допускает движение стержня 7 вправо и влево. Муфты сцепления 50 валов позволяют свободное продольное движение их.
Опускание штуцера 6 в момент снимания и одевания на него ботинка, производится нажатием на педаль 51 (фиг. 9 и 10), соединенную тягой 52 с зубчатой рейкой 53, которая передает движение через зубчатые колеса 54 и зубчатую рейку 55 упору 8. При этом конец стержня 7 идет по наклону вниз и, следовательно, опускает штуцер. При отпускании педали упор 8 силою пружины 56 возвращается в первоначальное положение. Рейка 55 соединяется с упорОм 8 при посредстве планки 57, имеющей зубцы, входящие в соответству1Ьщие впадины упора, позволяя последнему свободно двигаться вверх и вниз.
Механизм пускается в ход нажатием ножной педали, как и у ныне существующих машин. На одном плече педаль имеет выемку 58 (фиг. 12), в которую, в момент нажатия на педаль, входит при помощи пружины 59 конец плеча рычага 60. Конец второго плеча 61, входящий в паз рычага 62, заставляет другое плечо его повернуться по напра- влению к стержню 7. В продолжении работы рабочий не должен держать ногу на педали.
Механизм останавливается автоматически: при движении в сторону стержня 7 он надавливает на конец рычага 62, оторый передает движение концу плеча рычага 60 и последнее выходит из выемки 58 педали. Рычажок 62-а слуит для выключения механизма при вижении стержня 7 влево. Винты 63 редназначаются для регулировки длины атягиваемой стороны носка, так как, ем быстрее остановится механизм, тем еньшую дляиу стороны поска он заянет.
Обязанность работающего на предлагаемом механизме состоит: в надевании на штуцер ботинка (фиг. 1) отодвиганием от себя рукоятки 65а, одеванием трубкой колодки на шпенек 65S и затем движением к себе рукоятки, на которой имеется собачка, входящая в зубцы 65в; в установке ботинка (перед затяжкой правой или левой стороны носка) срединою носка против тексового патрона; в пуске машины в ход, в переключении, рычагом 40, (один конец которого имеет форму вилки для вставления колена ноги. рабочего) направления вращения ботинка и в снимании затянутого ботинка, на штуцер.
Регулировка под размер ботинка производится: на штуцере 6-поднятием и опусканием детали 64 и передвижением вперед и назад стойки 65; по ширине и длине носка-разведением и. сведением щечек 66 винтом 67 и передвижением вперед и назад салазок 24 поворачивающего механизма, для чего ослабляются винты 68 и 70 и после установки снова притягиваются (фиг. 7, 6 и 5)-,. по высоте носка-винтом 69 (фиг. 1 и 2).
Расстояние между вбиваемым тек-сом достиг.:1ется укреплением болта 32. (фиг. 3 и 4) на соответствующем расстоянии от ползуна 30 тексового патронав продольном вырезе отростка 31. Размах движения вверх и вниз стержня 7 производится соответствующей установкой пальца 71 в вырезе рычага Ш (фиг. 2). Выворот клещей - соответствующим установлением пальца 72 в прорези плеча 42 (фиг. 6).
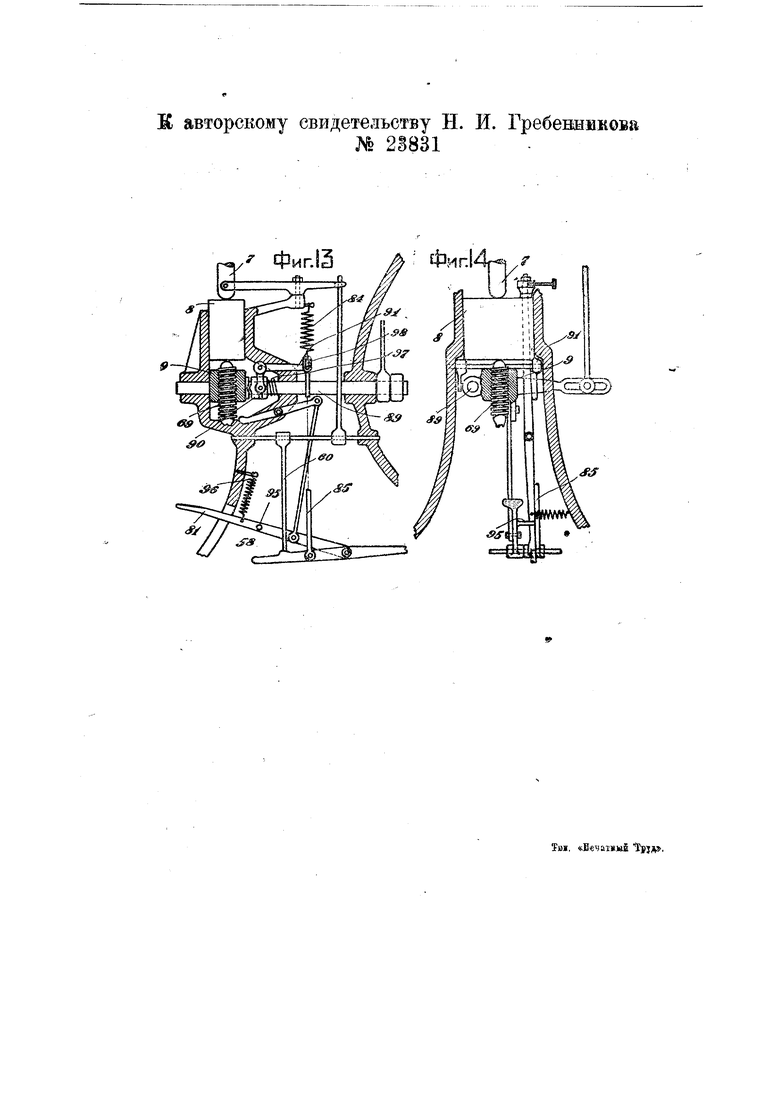
В видаизменении изобретения, д.1я пуска в ход механиз.ма и для поднимания П1туцера применена лишь одна педаль 81 (фиг. 13 и 14). При остановке механизма, когда пятка обуви уже затянута, происходит автоматическое опускание П1туцера: плечо 60 рычага механизма для остановки машины отходит в сторону, освобождая плечо рычага 58, имеющего на конце второго плеча клин, приводящий в соприкосновение фрикционные диски на контр-приводе машины. Рычаг 58, силою пружины 84 и при посредстве тяги 85, производит выключение механиз.ма и одновременно опускает штуцер: одноплечий рычаг 9. имеюпшй випт 69, который в свою очередь поддерживает упор 8, свободно -сидит на валу 89 и соединяется с ним -ПОМОЩЬЮ муфты 90, насаженной на :вал 89, посредством шпонки и могущей передвигаться в продольном напра, явлении его. При движении вверх рычага 91, производя вторым плечем выключение муфты 90; рычаг 9 опускается ВНИЗ и следовательно вместе с ним и штуцер. При дальнейшем движении вниз педаль 81 нажимает своим пальцем 95 на конец рычага 58, опуская его вниз, ,и тем самым помош,ью тяги 85 и рычага 91 производит включение муфты 90, а вместе с ней и самого механизма. После того,-как конец рычага 60 механизма для автоматического останавли.вания машины застопорил рычаг 58, педаль возвранхается в первоначальное положение силою пружины 96. Пружина 97 и продольный вырез 98 в конце тяги 85 позволяют включать механизм, когда муфта 90 уже включена и при дальнейшем опускании рычага 58 палец рычага 91 свободно скользит в вырезе 38.
Для передвижения стержня 7 вдоль его оси применен рычаг 94, предназначенный для перемеш,ения рычага 9.
Метод установки ботинка срединою заднего ремня против тексового патрона перед затяжкой правой и левой стороны пятки, согласно видоизменения изобретения, отменяется, а затяжка произво.дится от конца одного крыла задника и до другого без перерыва. Этим устраняются лишние движения рабочего и необходимость два раза останавливать механизм во время затяжки одной пятки, Б результате чего производительность .механизма повышается.
Предмет изобретения.
1. Механизм для транспортирования обуви при затяжке, отличающийся при менением фигурной шестерни 25, которая снабжена помещенным в направляющий паз 29 роликом 28 и укреплена на стержне 7, пропущенном через помещенный на салазках 24 иолзун 26.
2.Форма выполнения механизма по п. 1, отличающаяся тем, что для передачи движения от ползуна 30 фигурной шестерне 25 применена шестерня 34, которая снабжена собачкой 37, действующей совместно с укрепленным на валу 35 храповым колесом 36, и находится в зацеплении с зубчатым сегментом 32, расположенным на конце рычага 33.
3.Форма выполнения механизма по п. 1, отличающаяся тем, что для автоматической остановки последнего, предусмотрены расположенные по бокам стержня 7 установочные винты 63, один из которых укреплен в рычаге 62, сочлененном с нагруженным пружиной 59 рычагом 60-61. 4.Форма выполнения механизма по п. 1, отличающаяся тем, что для передвижения стержня 7 вдоль оси, предусмотрен нагруженный пружиной 56 упор 8, опирающийся на рычаг.9, при-. водимый в движение от эксцентрика 11 через носредство рычага 13 и тяги 145.Форма выполнения механизма ио п. 1, отличающаяся тем, что, с целью подачи ботинка вперед при его подъеме, салазки 24 снабжены зубчатыми рейками 23, для передвижения которых предусмотрен ползун 17.
6.Видоизменение механизма по п.и. 1-5,,,отличающееся тем, что вместо фигурной шестерни 25 на стержень 7 насажена, находящаяся в зацеплении с рейкой 39, цилиндрическая щестерня 38, несущая помещенный в направляющий паз 29 ролик 28.
7.Видоизменение механизма, по н.п. 1-4 и 6, отличающееся тем, что, для передвижения стержня 7 вдоль его оси, применен рычаг 94, предназначенный для перемещения рычага 9 (фиг. 13). к авторСЕгоиу свидетельству Н. И. № 28881 Гребенникова
ж авторскому свидетельству Н. И.
Фиг101 № 23831
&
ff
J-7 Л
ш -«Гребенниковв авторскому свидетельству Н. И.
Фиг. 5
ff № 23831
х
J
4JSO
ff
/3 Гребенникова Е авторскому свидетельству Н. И. № 23831
Фиг.14г // Гребенникова

