Изобретение относится к области индуктивной электроразведки, основанной на измерении осей эллипса поляризации электромагнитного поля.
Известны устройства для измерения параметров эллипса поляризации электромагнитного поля, содержащие ортогональные приемные рамки, усилители, систему приведения координат к осям эллипса поляризации с вращающимся трансформатором и регистратор.
Предложенное устройство отличается от известных тем, что система приведения координат содержит дополнительно два вращающихся трансформатора (ВТ), при этом входы первого ВТ соединены с выходами первого и второго усилителей, входы второго ВТ - с первым выходом первого ВТ и с выходом третьего усилителя, входы третьего ВТ - со вторыми выходами первого и второго ВТ, первые выходы второго и третьего ВТ соединены со входами регистратора, а роторы вращающихся трансформаторов соединены соответственно через исполнительные механизмы следяии1х систем и фазовые детекторы со вторыми выходами ВТ, с первым выходом второго ВТ - роторы первого и второго ВТ и с первы.м выходом третьего ВТ - ротор третьего ВТ.
упростить аппаратуру и увеличить ее надежность.
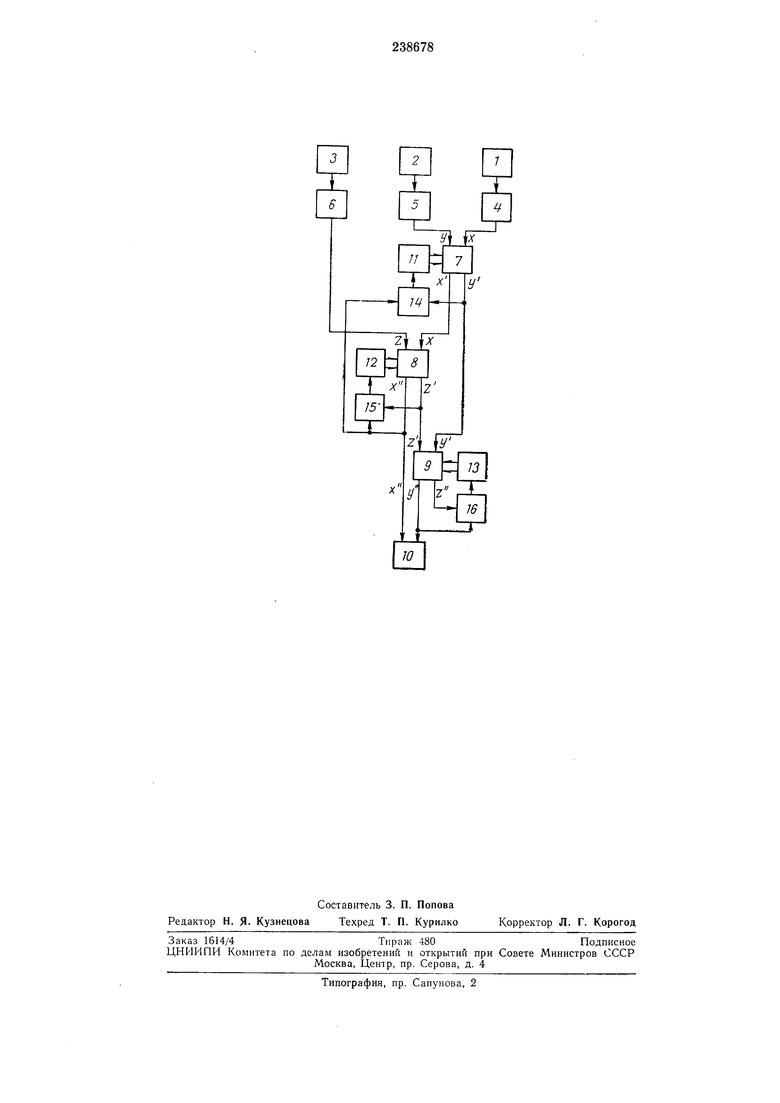
На чертеже представлена блок-схема предложенного измерительного устройства.
Устройство состоит из ортогональных индукционных магнитоприемников /, 2, 3, идентичных усилителей 4, 5, 6, четырехобмоточных ВТ 7, 8, 9, регистратора 10, исполнительных механизмов //, 12, 13 следящей системы и
фазочувствительных детекторов 14, 15, 16.
Принцип действия устройства состоит в автоматическом приведении координат к большой и малой осям эллипса поляризации с помощью трех ВТ, осуществляющих трехкратный поворот координат.
Сигналы на выходе усилителей 4, 5 и 6 соответствуют трем пространственным компонентам переменного магнитного поля X, У и Z, совпадающим с направлением осей ОА,
ОУ и OZ соответствующих индукционных MHIнитоприемников /, 2, 3.
Если полагать, что ось ОХ совпадает с направлением движения и горизонтальна, ось OZ вертикальна и направлена вниз, ось ОУ
составляет с осями ОА и OZ правую систему координат, то первое преобразование координат (поворот вокруг оси OZ) осуществляется с помощью ВТ 7, на вход которого поступают сигналы А и У, а сигналы X и У на его вымагнитоприемников, как бы повернутых вокруг оси OZ на угол рысканья х|), равный повороту ротора ВТ 7; второе преобразои:ыие координат (поворот вокруг оси ОУ) осуществляется с помощью ВТ 8, на вход которого поступают сигналы Z и X, а на выходе - сигналы X и Z соответствуют сигналам датчиков, как бы повернутых вокруг оси ОУ па угол тангажа v, равный углу поворота ротора ВТ 8; третье преобразование коорд1И1ат (поворот вокруг оси ОХ) осуществляется с помощью ВТ 9, на вход которого поступают сигналы У и Z, а на выходе сигналы У и Z соответствуют сигналам датчиков, как бы повернутых вокруг оси ОХ на угол крена у, равный углу поворота ротора ВТ 8.
Исполнительные механизмы 11, 12, 13 вращают роторы ВТ 7, 8, 9 до тех пор, пока на выходе каждого фазочувствительного детектора 14, 15, 16 сигналы не станут равными нулю. Последнее возможно только в том случае, когда сигналы У и Z равиы нулю или находятся в фазовой квадратуре с сигналом А, а сигнал Z равен нулю.
Если сигналы У и Z равиы нулю, то сигнал X, поступающий на вход регистратора 10, соответствует вектору поляризации (случай линейно-поляризованного поля). Если сигналы У и Z находятся в фазовой квадратуре с сигналом X (при эллиптической поляричации), это соответствует ориентации ОХ в направлении больщой оси эллипса поляризации. Сигнал X, поступающий на первый вход регистратора 10, соответствует большой иолуоси эллипса поляризации.
Поскольку при этом сигналы У и Z совпадают по фазе, будут совпадать с ними по фазе и сигналы У и Z. ВТ 9 автоматически установится в положение, при котором сигнал
на выходе фазочувствительного детектора 16 равен нулю, т. е. Z 0. При этом значение У будет максимальным, что соответствует ориеитаиии оси ОУ в направлении малой оси
эллипса поляризации. Сигнал, поступающий с
выхода У ВТ 9 на второй вход регистратора,
соответствует малой оси эллипса поляризации.
Таким образом, описываемое устр рйство
обеспечивает автоматическое приведение координат к больщой и малой осям эллипса поляризации при отсутствии каких-либо требований к ориентации индукционных магнитоприемников в пространстве.
Предмет изобретения
Устройство для измерения параметров эллипса поляризации магнитного поля при индуктивной электроразведке, содержащее ортогональные приемные рамки, усилители, сигтему приведения координат к осям эллипса поляризации с вращающимся трансформатором, регистратор, отличающееся тем, что, с целью повыщения точности и упрощения измерений, система приведения координат содержит дополнительно два вращающихся трансформатора (ВТ), при этом входы первого ВТ соединены с выходами первого и второго усилителей, входы второго ВТ - с первым выходом первого ВТ и с выходом третьего
усилителя, входы третьего ВТ - со вторым; выходами первого и второго ВТ, первые выходы второго и третьего ВТ соединены со входами регистратора, а роторы вращающихся трансформаторов соединены соответственно
через исполнительные механиз.мы следящих систем и фазовые детекторы со вторыми выходами ВТ, с первым выходом второго ВТ - роторы первого и второго ВТ и с первым выходом третьего ВТ - ротор третьего ВТ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат инженерных металлических коммуникаций и устройство для его осуществления | 1986 |
|
SU1318957A1 |
| Сейсмограф | 1986 |
|
SU1409954A1 |
| Градиентометр | 1978 |
|
SU789949A1 |
| Способ измерения поляризационных характеристик антенны | 1988 |
|
SU1631460A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| УСТРОЙСТВО для ГЕОЭЛЕКТРОРАЗВЕДКИ | 1973 |
|
SU397876A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565067C1 |
| Устройство для измерения анизотропии пульсаций векторного поля | 1981 |
|
SU1136080A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2531065C2 |