Чл
/J 1 20
19
,4
4
О ОС
4 кг
Изобретение относится к подъемно-транспортной технике, в частности к захватным устройствам для длинномерных цилиндрических изделий.
Целью изобретения является повышение надежности в работе.
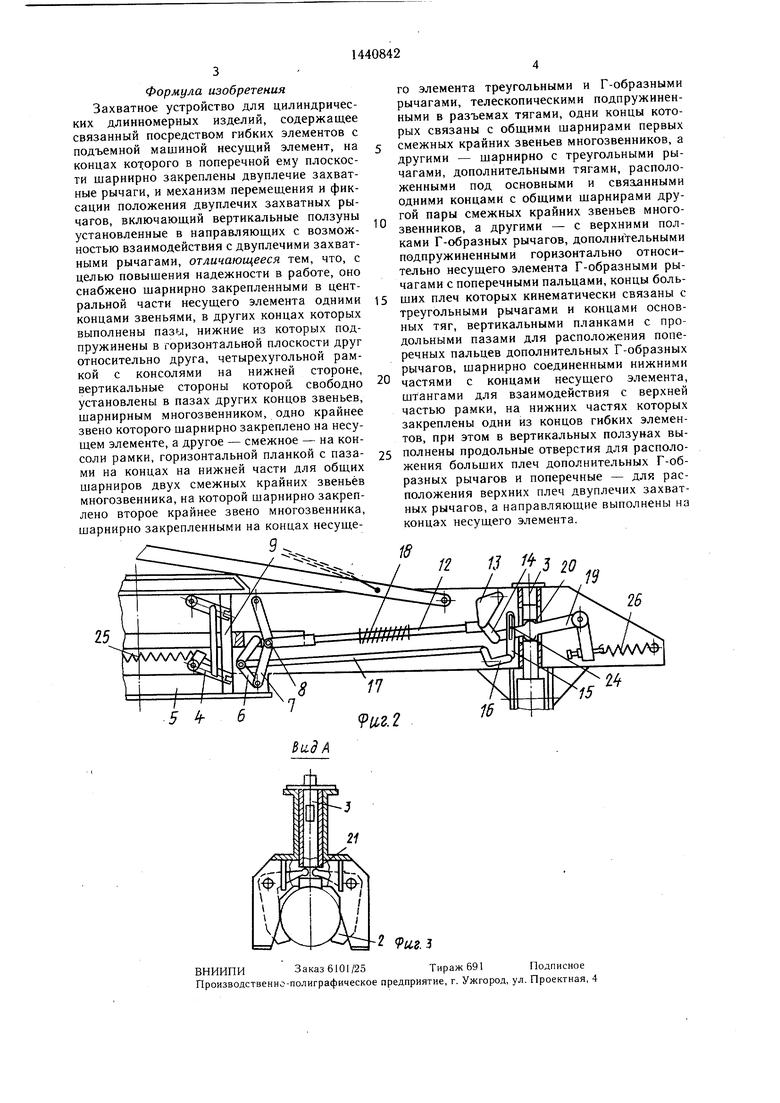
На фиг. 1 показано захватное устройство для длинномерных цилиндрических изделий в рабочем положении; на фиг. 2 - то же, в нерабочем положении; на фиг. 3 - вид А на фиг. 1.
Захватное устройство для цилиндрических длинномерных изделий включает в себя несущий элемент 1, на котором установлены двуплечие захватные рычаги 2, ползуны 3, звенья 4, подпружиненную рамку 5, двухзвенные шарнирные механизмы 6 и 7, образующие многозвенники, при этом механизм 7 выполнен с центральной осью шарнира 8. Между звеньями 7 и вертикальными сторонами 9 подпружиненной рамки 5 расположена планки 10 с пазом II. Устройство также включает в себя основную тягу 12, качающийся треугольный рычаг 13, поворотное звено 14, вертикальную планку 15, Г-образный рычаг 16, дополнительную тягу 17, при этом основная тяга 12 имеет пружину 18, дополнительный Г-образный рычаг 19 с отверстиями продольным 20, поперечным 21.
На траверсе 1 на осях установлены две штанги 22. На некотором расстоянии от осей вращения штанг 22 закреплены гибкие элементы 23. В планке 15 выполнен -продольный паз 24. Рамка 5 подпружинена пружиной 25. Дополнительный Г-образный рычаг подпружинен пружиной 26.
Устройство висит на гибких элементах 23. При этом штанги 22 подняты и находятся в верхнем положении. Изделие, например длинномерная труба, удерживается закрытыми двуплечими захватными рычагами 2. Ползуны 3 и подпружиненные дополнительные Г-образные рычаги 19 находятся в крайнем верхнем положении. Треугольный рычаг 13 находится в крайнем правом положении.
При опускании устройства натяжение гибких элементов 23 ослабевает и штанги 22 опускаются на подпружиненную рамку 5. Подпружиненная рамка 5 опускается.
Во время движения рамки 5 звенья 7 с осью шарнира 8 начинают распрямляться, перемещая основную тягу 12 и планку в крайнее левое положение. Горизонтальная планка 10, находящаяся плоской поверхностью на оси щарнира 8, в виде того, что ось шарнира 8, перемещаясь в крайнее левое положение, опускается - также опускается, и при самом крайнем левом положении оси 8 паз 11 горизонтальной планки 10 фиксирует ось шарнира 8 от перемещения в об- ратном направлении. Звенья 6, дополнительная тяга 17 в результате того, что рамка 5 и планка 10 опускаются также вместе с ними.
0
При подъеме гибкие элементы 23 начинают натягиваться и поднимать штанги 22 с рамки 5. Но подпружиненная рамка 5 не поднимается, так как ось шарнира 8 находится в пазу 11 планки 10 без возможности самопроизвольного выхода из него. Так как планка 14 основной тягой 12 переведена в крайнее левое положение, то при дальнейшем подъеме в момент отрыва двуплечих захватных рычагов 2 несущего элемента 1 с поверхности, например стапеля, дополнительный Г-образный рычаг 19 под действием пружииы 26 начинает перемещаться из крайнего верхнего положения в нижнее, раскрывая двуплечие захватные рыча5 ги 2. Изделие остается на стапеле.
При своем дальнейшем движении (1/3 хода) палец рычагов 19, находящийся в пазу 24 вертикальной планки 15, начинает воздействовать на нее. В результате этого Г-образный рычаг 16 поворачивается и через
0 дополнительную тягу 17 начинает воздействовать на звенья 6, которые, воздействуя на планку 10, заставляют его перемещаться в крайнее верхнее положение. Паз 11 сходит с оси шарнира 8. Звенья 7 начи5 нают складываться под действием пружины рамки 5. Рамка 5 поднимается, но не полностью потому, что находящийся в крайнем нижнем положении дополнительный Г-образ- ный рычаг 19 удерживает планку и треугольный рычаг 13 в положении, показан0 ном на фиг. I. При этом длина основной тяги 12 становится минимальной, так как пружина 18 тяги 12 сжата под действием пружины 25 рамки 5.
Освободившееся от изделия устройство
5 транспортируется к месту захвата следующего изделия, где устройство располагается над изделием параллельно и опускается на него. При захвате изделия гибкие элементы должны быть ослаблены, а штанги 22 не должны касаться подпружиненной рамки 5.
Во время опускания ползуны 3 устройства начинает взаимодействовать с изделием. Так как вес устройства превышает усилия пружин 25, то захватное устройство
5 будет безпрепятственно опускаться, а ползуны 3 подниматься, переводя дополнительные Г-образные рычаги из нижнего положения в верхнее, поворачивая при этом звено 14 вокруг оси треугольного рычага 13 до положения, показанного на фиг. 1. Рамка 5 подни0 мается в свое верхиее положение под действием освобождающихся пружин.
Поднявшийся в верхиее положение дополнительный треугольный рычаг 19 закрывает двуплечие захватные рычаги 2, которые начинают удерживать изделие. Грузо5 захватное устройство поднимается и начинает транспортировать изделие и, например, стапель, где и происходит освобождение изделия.
Формула изобретения Захватное устройство для цилиндрических длинномерных изделий, содержащее связанный посредством гибких элементов с подъемной машиной несущий элемент, на концах ко- орого в поперечной ему плоскости шарнирно закреплены двуплечие захватные рычаги, и механизм перемещения и фиксации положения двуплечих захватных рычагов, включающий вертикальные ползуны установленные в направляющих с возможностью взаимодействия с двуплечими захватными рычагами, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено шарнирно закрепленными в центральной части несущего элемента одними концами звеньями, в других концах которых выполнены пазы, нижние из которых подпружинены в горизонтальной плоскости друг относительно друга, четырехугольной рамкой с консолями на нижней стороне, вертикальные стороны которой свободно установлены в пазах других концов звеньев, шарнирным многозвенником, одно крайнее звено которого шарнирно закреплено на несущем элементе, а другое - смежное - на консоли рамки, горизонтальной планкой с пазами на концах на нижней части для общих шарниров двух смежных крайних звеньев многозвенника, на которой шарнирно закреплено второе крайнее звено многозвенника, шарнирно закрепленными на концах несуще
го элемента треугольными и Г-образными рычагами, телескопическими подпружиненными в разъемах тягами, одни концы которых связаны с общими шарнирами первых
смежных крайних звеньев многозвенников, а другими - шарнирно с треугольными рычагами, дополнительными тягами, расположенными под основными и связанными одними концами с общими шарнирами другой пары смежных крайних звеньев многозвенников, а другими - с верхними полками Г-образных рычагов, дополнительными подпружиненными горизонтально относительно несущего элемента Г-образными рычагами с поперечными пальцами, концы больших плеч которых кинематически связаны с треугольными рычагами и концами основных тяг, вертикальными планками с продольными пазами для расположения поперечных пальцев дополнительных Г-образных рычагов, щарнирно соединенными нижними
частями с концами несущего элемента, штангами для взаимодействия с верхней частью рамки, на нижних частях которых закреплены одни из концов гибких элементов, при этом в вертикальных ползунах выполнены продольные отверстия для расположения больших плеч дополнительных Г-образных рычагов и поперечные - для расположения верхних плеч двуплечих захватных рычагов, а направляющие выполнены на концах несущего элемента.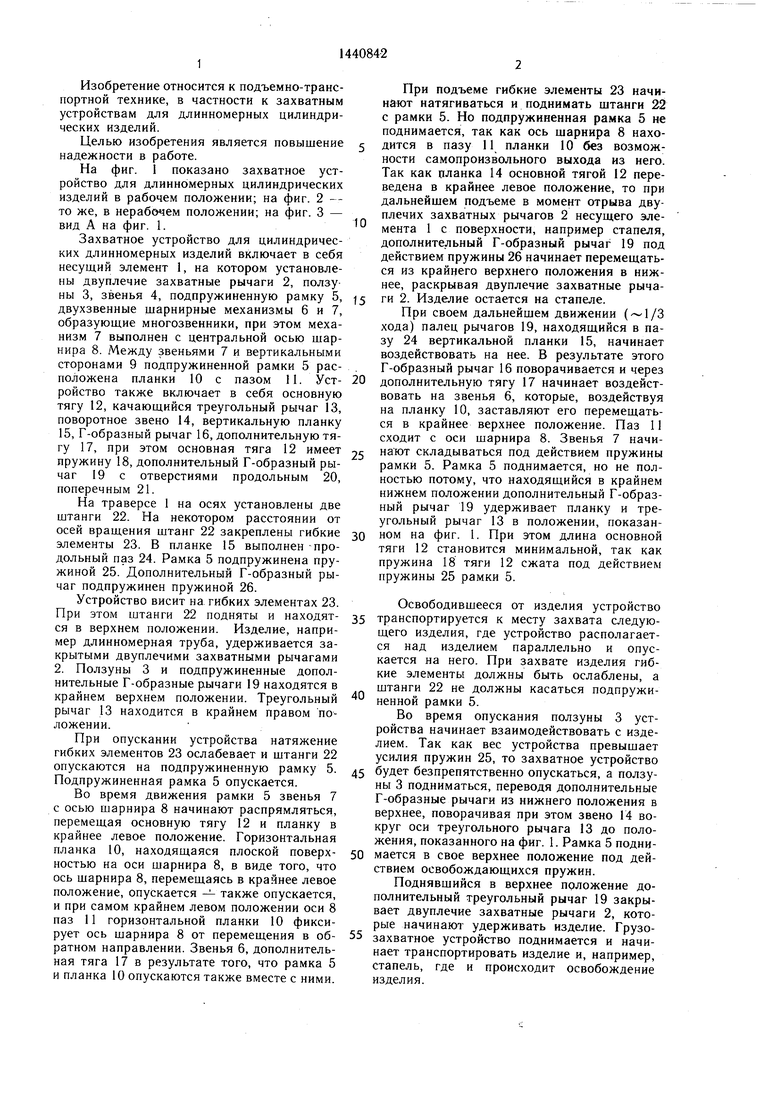
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
| Устройство для загрузки пакета длинномерных изделий | 1980 |
|
SU874528A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1119757A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282549C1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Станок для гибки длинномерных изделий | 1980 |
|
SU940913A1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| Устройство для подъема длинномерной конструкции в вертикальное положение | 1985 |
|
SU1291542A1 |
Изобретение относится к подъемно- транспортной технике. Цель&х изобретения является повышение надежности в работе. Захватное устройство для длинномерных изделий содержит рамку 5, горизонтальные планки 10, звенья 4, звенья шарнирных многозвенников, соединенные с ними тяги 12 и дополнительные тяги 17, кинематически связанные с дополнительными Г-образными рычагами 19, взаимодействующими с двуплечими захватными рычагами 2. 3 ил.
5
18
/J ,320
19
26
У
| Автоматическое захватное устройство для длинномерных грузов | 1980 |
|
SU901232A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
