Изобретение относится к области автомйtHqecKoro управления.
Известны следящие системы с .комбинированным управлением, содержащие приемный синусно-косинусный вращающийся трансформатор, усилитель и корректирующий
блОК.
Предложенная система отличается от изйестных тем, что в ней установлен преобразователь, ВХОД Которого подключен к одному из .входов синуснопкосинусного Вращающегося трансформатора, а выход через корректирующий бло1К подсоединен «о ВХОду усилителя.
Это позволяет значительно повысить точность системы.
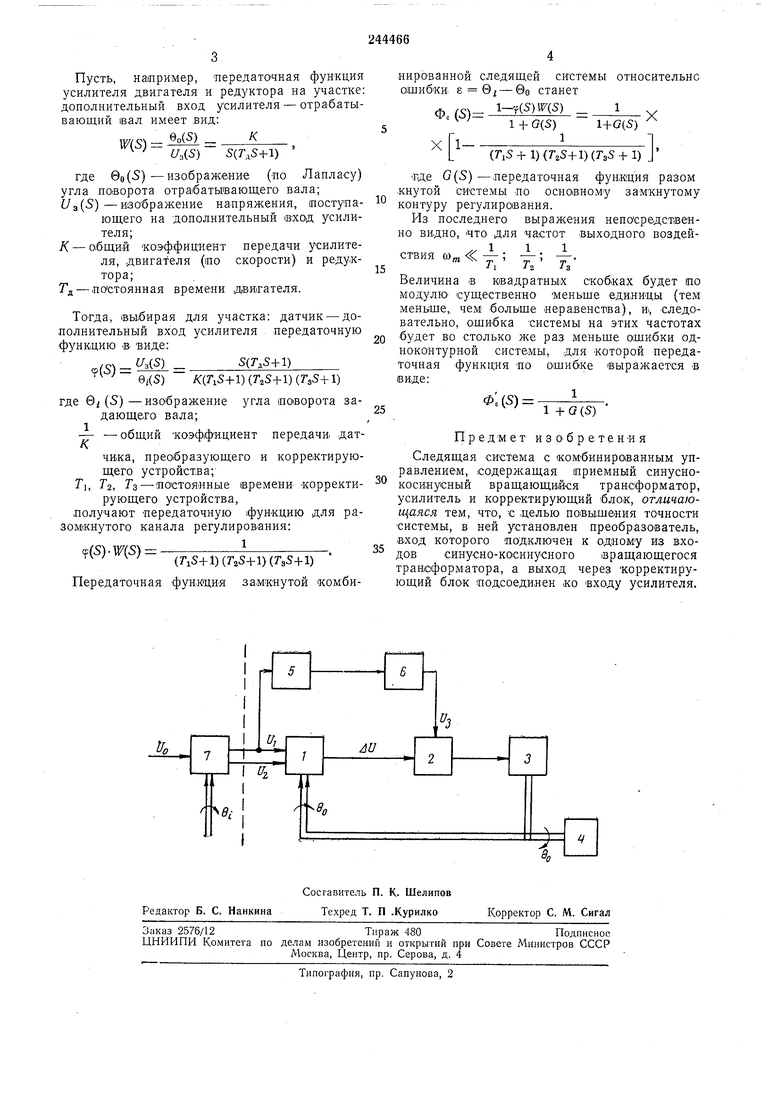
На чертеже представлена :блок-схема следящей системы с комбинированным управлением.
Схема Содержит лри.нимающий элемент Измерительной схемы-.приемный синуснокосинусный вращающийся трансформатор /, усилитель 2, двигатель 3, нагрузку 4, преобразователь 5, корректирующий блок 6 и датчик 7.
На выходах датчика - входах трансформатора действуют напряжения:
где f/o - напряжение питания датчика;
/1 - коэффициент трансформации датчика;
QI-угол поворота задающего вала.
В ря.де практически важных случаев диапазон изменения угла не выходит за пределы ±30%. Тогда Ui UoliQi, и это напряжение может быть Еопользовано в качёст1ве
исходной информации для образования разомкнутого «анала регулирован.ия (грубого капала).
При повороте задающего вала на угол в; @i возникает напряжение Ui U, которое после демодулящии, в преобразователе 5 фильтруется и корректируется в корректирующем бло,ке 6 и через усилитель 2 воздействует на двигатель 3. Двитатель развернет отрабатывающий вал на угол во во, близкий по величине к углу задавания QI. Остающаяся в результате такого грубого слежения ошибка (&I - во) отрабатывается основной однокончуриой замкнутой системой .ия по отклонению по цепи (в| -
во) блок 5- блок .
В этом случае условия работы одноконтурной замкнутой системы гораздо легче, чем при отсутствии дополнительного разомкнутого канала слежения.
Пусть, например, -передаточная функция усилителя двигателя и редуктора на участке: дополнительный вход усилителя - отрабатывающий 1вал имеет вид:
Qo(S) К
W(S)
5(Гд5+1)
(f,(S)
где во(5) - изображ ение (по Лапласу)
угла поворота отрабатывающего вала;
t/3(5)-изображение напряжения, поступающего на дополнительный вход усилителя;
/С -общий Коэффициент передачи усилителя, двигателя (по скорости) и редуктора;
Гд -постоянная времени двигателя.
Тогда, выбирая для участка: датчик - дополнительный вход усилителя передаточную функцию iB виде:
y(S) з()S()
в;(5) K()()(TsS+l)
где 6(5)-изображение угла поворота задающего вала;
- - общий Коэффициент передачи, датК.
чи.ка, прео1бразующего и корректирующего устройства;
, Т, Гз -постояиные еремени корректирующего устройства,
получают Передаточную функцию для разомжнутого канала регулиров-ания:
CE(S). 1Г(5) .
()()()
Передаточная функция замкнутой «омбинированной следящей системы относительно ошибКИ: 8 6 - 00 станет
-i((S) 1
Ф.(5) l-i-G(S)1+G(5)
TiI1
L(T-iS-f 1) (7-25+1) (7-35 + 1) J
аде G(S) -передаточная функция разом кнутой системы по основному замкнутому контуру регулирования.
Из последнего выражения непосредственно видно, что для частот выходного воздей.,1 1 1
ствия со„ « - ; - ; -.
I 1 2-/З
Величина в квадратных скобках будет по модулЮ существенно меньще единицы (тем меньще,. чем больще неравенства), и-, следовательно, ошибка системы на этих частотах будет во столько же раз меньще ошибки одноконтурной системы, для которой передаточная функция ПО ошибке выражается в виде:
Ф.(8}
1 + G (5)
Предмет изОбретеНИя
Следящая система с комбинированным управлением, содержащая приемный синуснокосинусный вращающийся трансформатор, усилитель и корректирующий |блок, отличающаяся тем, что, с делью повы;ще«ия точности системы, в ней установлен преобразователь, вход которого подключен к одному из входов синусно-косинусного вращающегося трансформатора, а выход через корректирующий блок подсоединен ко входу усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система с комбинированным управлением | 1975 |
|
SU585472A1 |
| Дискретный замкнутый электропривод | 1983 |
|
SU1159146A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1970 |
|
SU263014A1 |
| Счетно-решающее устройство для преобразования прямоугольных координат вектора в сферические | 1973 |
|
SU475627A1 |
| Фазовая следящая система | 1981 |
|
SU954926A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
