1
Изобретение относится к счетно-решающей технике и может использоваться в вычислительных устройствах.
По основному авт. св. № 416701 известно счетно-решающее устройство для преобразования прямоугольных координат вектора в сферические, содержащее источник постоянного напряжения, три линейных вращающихся трансформатора, две следящие системы, каждая из которых состоит из последовательно соединенных усилителя, двигателя отработки и синусно-косинусного вращающегося трансформатора, следящую систему построения модуля вектора, состоящую из последовательно соединенных усилителя, двигателя отработки, линейного и масштабного вращающегося трансформаторов, а также три дополнительных ускоряющих редуктора с кулачковыми выключателями на валах, три дополнительных линейных вращающихся трансформатора, которые через ускоряющие редукторы механически соединены соответственно с каждым из основных линейных вращающихся трансформаторов, два дополнительных синусно-косинусных вращающихся трансформатора, которые .механически соединены с двигателями соответствующих следящих систем, а также релейные переключатели, обмотки питания которых подключены через последовательно соединенные кулачковые выключатели к источнику постоянного напряжения, а контакты включены соответственно в цепь питания дополнительных линейных вращающихся трансформаторов и в цепи между входами усилителей следящих систем и обмотками основных и дополнительных синусно-косинусных вращающихся трансфор.маторов.
Цель изобретения - повышение точности
работы.
Это достигается тем, что -предлагаемое устройство содержит четвертый ускоряющий редуктор и последовательно соединенные четвертый дополнительный линейный вращающийся
трансформатор и дополнительный масштабный вращающийся трансформатор, причем первый вход четвертого дополнительного линейного вращающегося трансформатора подключен к входу одного из дополнительных
линейных вращающихся трансформаторов - датчиков прямоугольной координаты, а второй вход через четвертый ускоряющий редуктор механически соединен с основным линейным вращающимся трансформатором следящей системы построения модуля вектора, вход усилителя следящей системы построения модуля вектора через дополнительную контактную группу релейного переключателя подключен к выходу одного из основных масштабных вращающихся трансформаторов и к выходу до3
полнительного масштабного вращающегося трансформатора.
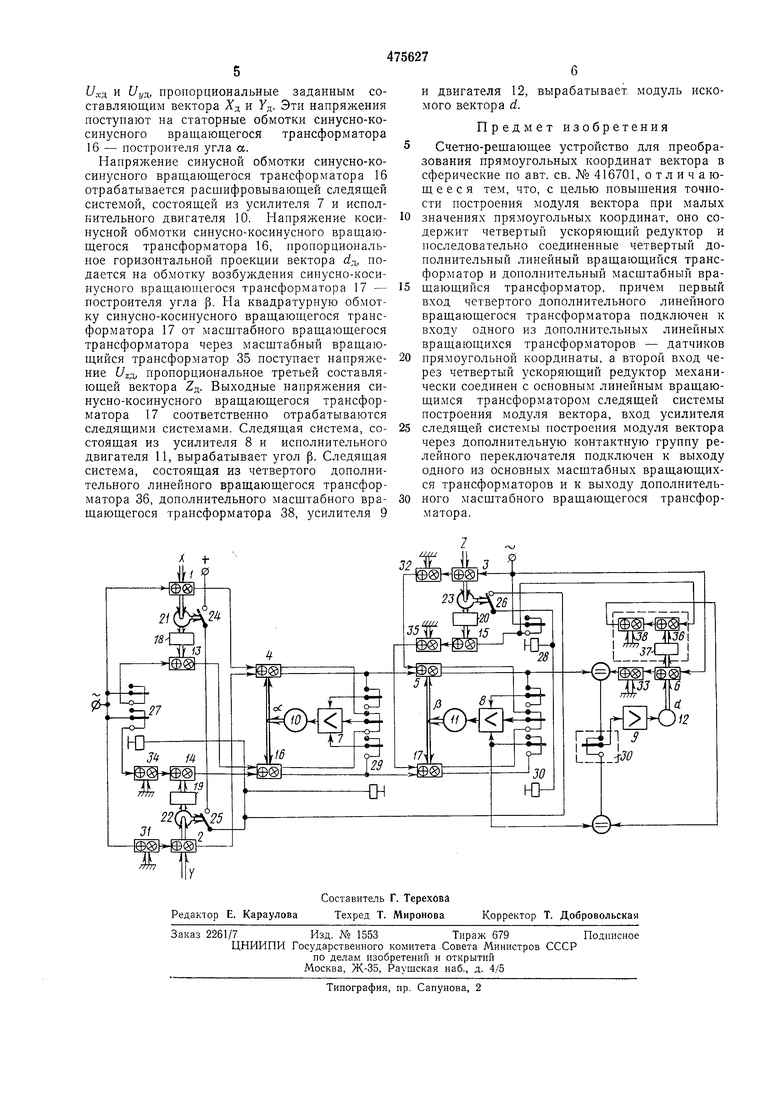
На чертеже изображена схема предлагаемого устройства.
Устройство содержит линейные вращающиеся трансформаторы 1, 2 и 3 - датчики прямоугольных координат X, У, Z вектора; синусно-косинусные вращающиеся трансформаторы 4 и 5 - построители полярных углов а, Р; линейный вращающийся трансформатор 6 - построитель модуля вектора d; усилители 7, 8 и 9 расшифровывающих следящих систем построения полярных углов а, |3 и модуля вектора d; исполнительные двигатели 10, 11 и 12 расшифровывающих следящих систем построения полярных углов а, р и модуля вектора d; дополнительные линейные вращающиеся трансформаторы 13, 14 и 15 - датчики прямоугольных координат Хд, Уд, 7д; донолнительные синусо-косинусные вращающиеся трансформаторы 16 и 17 - построители полярпых углов а, Р; ускоряющие редукторы 18, 19 и 20, включепные соответственно между линейными вращающимися трансформаторами I и 13, 2 и 14, 3 и 15; кулачок 21 на валу линейного вращающегося трансформатора 1; кулачок 22 на валу линейного вращающегося трансформатора 2; кулачок 23 на валу линейного вращающегося трансформатора 3; выключатели 24, 25 и 26, управляемые соответственно кулачками 21, 22 и 23; переключатели 27 и 28 подключения входов дополнительных линейных вращающ 1хся трансформаторов 13, 14 и 15 к сети переменного тока при малых значениях прямоугольных координат; переключатель 29 переключения входа усилителя 7 с выхода синусно-косинусного вращающегося трансформатора 4 на выход синусно-косинусного вращающегося трансформатора 16; переключатель 30 переключения входа усилителя 8 с выхода синусно-косинусного вращающегося трансформатора 5 на выход сннуснокосинусного вращающегося трансформатора 17; вольтодобавочную мащину 31 уравнивания масштаба координаты У с масштабом координаты X; масштабный вращающийся трансформатор 32 уравнивания координаты Z с масщтабом горизонтальной составляющей модуля вектора с синусно-косинусного вращающегося трансформатора 4; масштабный вращающийся трансформатор 33 уравнивания масштаба модуля вектора с линейного вращающегося трансформатора 6 с масштабом модуля вектора с синусно-косинусного вращающегося трансформатора 5, причем обмотки трансформаторов 5 и 33 включены встречно; вольтодобавочную мащину 34 уравнивания масщтаба координаты Уд с масштабом координаты д; масштабный вращающийся трансформатор 35 уравнивания масщтаба координаты 2д с масштабом горизонтальной составляющей дополнительного вектора д с синусно-косинусного вращающегося трансформатора 16; четвертый дополнительный линейный вращающийся трансформатор 36 - построитель модуля дополнительного вектора д, четвертый ускоряющий редуктор 37; дополнительный масштабный вращающийся трансформатор 38 уравнивания масштаба модуля дополнительного вектора с линейного вращающегося трансформатора 36 с масштабом модуля дополнительного вектора с синусно-косинусного вращающегося трансформатора 17, причем обмотки трансформаторов 38 и 17
О включены встречно, а переключение входа усилителя 9 с зыхода масштабного врспцающегося трансформатора 33 па выход дополнительного масштабного вращающегося трансфо)матора 38 обеспечивается дополнительной
5 контактной гру|;1пой перекл1очате.:1я 30. Схема работает следующим образом. Линейные вращающиеся трансформаторы 1 и 2 обеспечивают преобразование механических перемещений их роторов в нанряжения
0 ix и Uy, пропорциональные заданным составляющим вектора X и Y. Эти напряжения поступают на статорные обмотки синусно-косинусного вращающегося трансформатора 4 - построителя угла а. Напряжение синусной об5 мотки синусно-косинусного вращающегося трансфор.матора 4 отрабатывается расшифровывающей следящей системой, состоящей из усилителя 7 и исполнительного двигателя 10. В результате вырабатывается искомый угол
0 а. Напряжепие косипусной обмотки синуснокосинусного вращающегося трансформатора 4, пропорциональное горизонтальной проекции модуля вектора d, подается на обмотку возбуждения синусно-косинусно вращающегося
5 трансформатора 5 - построителя угла р. На квадратурную об.мотку синусно-косинусного вращающегося трансформатора 5 от линейного вращающегося трансформатора 3 через масштабный вращающийся трансформатор 32
0 поступает напряжение U, пропорциональное третьей составляющей вектора Z. Выходные напряжения синусно-косинусного вращающегося трансформатора 5 соответственно отрабатываются следящими системами. Следящая система, состоящая из усилителя 8, исполнительного двигателя 11, вырабатывает угол р. Следящая система, состоящая из линейного вращающегося трансформатора 6 и масщтабного вращающегося трансформатора 33, усилителя
0 9 и двигателя 12, вырабатывает модуль искомого вектора d.
При малых значениях прямоугольных координат от воздействия кулачков 21, 22 и 23 на выключатели 24, 25 и 26 последние срабатывают и замыкают цепь включения переключателей 27-30. При этом к сети переменного тока подключаются линейные вращающиеся трансформаторы 13, 14, 15 и 36, механически еоединенные соответетвенно с линейными вращающимися трансформаторами 1, 2, 3 и 6 через ускоряющие редукторы 18, 19, 20 и 37 соответственно.
Линейные вращающиеся трансформаторн 13 и 14 обеспечивают преобразование механи5 ческих перемещений и.х роторов в папряжениЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1972 |
|
SU328390A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ МОДУЛЯ И АРГУМЕНТА ВЕКТОРА | 1972 |
|
SU328423A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| Устройство для формирования дозных полей | 1974 |
|
SU576684A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ ВЕКТОРНОЙФУНКЦИИ | 1970 |
|
SU277905A1 |
| Векторный построитель | 1956 |
|
SU113081A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ПРИБОР | 1969 |
|
SU245906A1 |
