1
Иаобрегение отнсхзится к технике автоматического управления и регулирования и может найти широкое применение в системах управления, дистанционные передачи которых выполнены с применением синусно-косинусных вращающихся трансформаторов
(сквт).
Известна следящая система с комбинированным управлением, в которую входят три коммутируемых блока коррекции, ооуществляющие минимизацию среднеквадратичного значения ошибки при отработке различных входных сигналов i
Данная система характеризуется сложностью исполнения.
Наиболее близкой к изобретению по технической сущности является следящая система с комбинированным управлением, содержащая синусно-косинусный вращающийся трансформатор (СКВТ) - приемник, выход которого через последовательно соединенные усилитель и двигатель подключен к объекту регулирования, СКВТ - датчик, выход которого подсоединен к входу СКВТ - приемнике, вал которого связан с валом объекта
регулирования, демодулятор, выход которог через корректирующий бл(Ж подключен к другому входу усилителя ,2j.
Однако эта система может работать как комбинированная только в зоне ±,30 от нулевого положения.
Цель изобретения - повыщение точности системы.
Предлагаемая система отличается от известной тем, что содержит дсшолнительны СКВТ - приемник, связанный через :механическую передачу с валом объекта регулирования, при этом вход дополнительного СКВприемника подсоединен к выходу СКВТдатчика, а выход - к входу демодулятора.
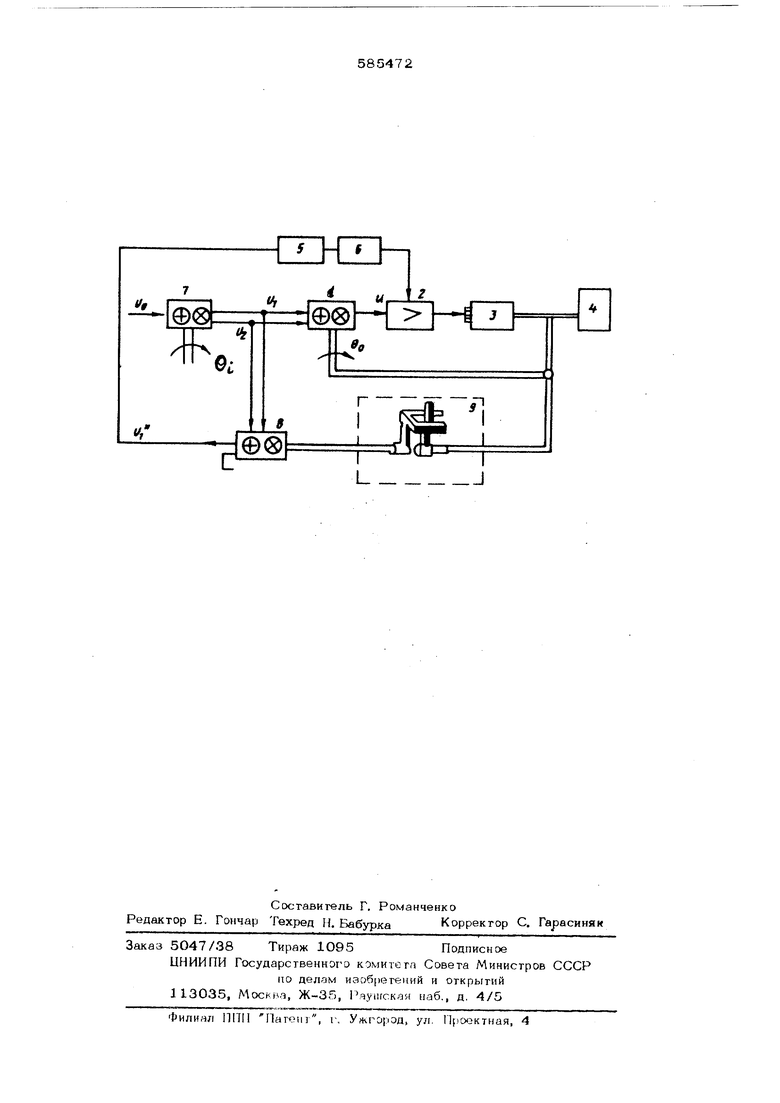
На чертеже дана блсж-схема следящей системы.
Следящая система с комбинированным управлением содержит синусно-косинусный вращающийся трансформатс (СКВТ)-приемник 1, .усилитель 2, двигатель 3, объект регулирования 4, демодулятор 5, корректирующий блок6, СКВТ-датчик1 7, дополнительный СКВТ-приемник 8 и механическую передачу (с зазором) 9.
Кроме того, на чертеже принятые следующие обозначения: XJ , Ug - сигналы выходных обмоток СКВТ -датчика; U -сигнал на выходе дополнительного СКВТ-приемника; © , в(5 - входной и выходной углы системы и Ug - напряжение питания СКВТдатчика. . Следящая система с комбинированным
управлением работает следующим образом.
В качестве исходной информации для
разомкнутого канала регулирования используется сигнал, снимаемый с обмоток дополнительного СКВТ-приемника 8, который соединен с выходным валом 4 с помощью механической передачи 9 с зазором. Величина зазора выбирается tiexea из амплитуды сигнала на входе системы. Величина зазора должна быть больше, чем удвоенная амплитуда входного возмущени, которое предполагается гармоничес-
КИМ.
При воздействии на систему входного возмущения возникает напряжениеUj KjSifJ0 HUj K COs9j , Эти напряжения поступают на СКВТ-приемник 8 и с него снимается напряжение U U, , которое после демодуляции блока Б воадействуют на следящую систему. При отработке входных возмущений и колебаниях объект рег уяиреваний 4 и СКВТ-приемника 1 в пределах величины зазора СКВТ-приемник 8 остается неподвижным и лишь трансформирует без ис кажений сигнал II. в виде напряжения Lf
11 ч
Напряжение Uj поступает в демодулятор 5, корректирующий блок 6 и далее на усилитель 2.
При поступлении входных возмущений на участке окружности, превышающих пределы ±30 (в другом секторе окружности) следящая система отрабатывает это возмущение по основной одноконтурной замкнутой системе слежения по отклонению. При этом дополнительный СКВТ-приемник 8 также занимает (поворачивается) новое положение. Входные колебания Около нового положения вала нагрузки из-за зазора не передаются на СКВТ-приемник 8, а дистанционная передача из последовательно сое-
диненных СКВТ-дагчика 7 и СКВТ-приемника 8 передает сигнал по разомкнутому конTjrpy регулирования (при этом СКВТ-приемни 8 неподвижен).
Таким образом, основная одноконтурная система как бы подтягивает дополнительный СКВТ-приемник В для того, чтобы с лего снимался сигнал, соответствующий линейному участку характеристики, где справедливо соотношение
UiKjUoe.e,- ,
а линейный участОк с диапазоном углов ±.30 как бы перемещается по окружности на тот участок, где система должна воспроиводить гармонические колебания.
Таким образом, предлагаемая следящая система с комбинированным управлением позволяет использовать принцип управления по входному возмущению, обеспечивающий уменьшение динамической ошибки в 1,5-2 раза в системах с дистанционной передачей на СКВТ во всем диапазоне углов входных возмущений.
Формула изобретения
Следящая система с комбинированным управлением, содержащая синусно-косинусный вращающийся трансформатор (СКВТ) - приемник, выход которого через последовательно соединенные усилитель и двигатель подключен,к объекту регулирования, СКВТдатчик, выход которого подсоединен к входу СКВТ-приемника, вал которого связан с валом объекта регулирования, демодулятор, выход которого через корректирующий блс« подключен к другому входу усилителя, отличающаяся тем, что, с целью повышения точности системы, она содержит дополнительный СКВТ-приемник, связанный через механическую передачу с валом объекта регулирования, при этом вход дополнителного СКВТ-приемника подсоединен к выходу СКВТ-датчика, а выход - к входу демодулятора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 259227, кл. G 05 11/01, 1968.
2.Авторское свидетельство СССР № 244466, кл. Q 05 il/Ol, 1968.
II
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1976 |
|
SU585473A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| Устройство компенсации помех (его варианты) | 1982 |
|
SU1096604A1 |
| НАКЛОННО-ПОВОРОТНЫЙ СТЕНД | 2004 |
|
RU2277697C1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| Следящая система с комбинированным управлением | 1984 |
|
SU1236419A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |