Известны способы биоэлектрического управления сервоп.рвводамН ортопедических аппаратов. В качестве управляющего параметра используют биоэлектрическую активность пораженных мышц. Одиа-ко в том случае, когда поражение мышц весьма глубоко, биоэлектрический сигеал представляет собой последовательность импульсов, пмеющих малую мощность, а и.х амплитуда лищь незначительно может превосходить уровень помех, а порой и вообще лежать ниже этого уровня. В этом случае известные способы биоэлектрического управления мышцами с глубоким -парезом оказываются малоэффективными.
Предлагаемый способ отличается от известных тем, что в качестве основного параметра для биоэлектрического управления принимают не энергетический показатель - биоэлектрическую активность, а числовую характеристику - частоту следования биоэлектрических импульсов. Это связано с тем, что с увеличением напряжения глубокопаретичных мышц растет частота следования импульсов биоэлектрической активности, хотя их амилитуда вначале увеличивается незначительно, а затем вообще имеет тенденцию к снижеиию.
Предлагаемый способ позволяет, следовательно, повысить помехоустойчивость уиравления сервоприводом биопотенциалами мышц. При онределениой степени пареза зависимость частоты следования им ;ульсов от степени мышечного нанряжения имеет нелинейный характер. Предлагаемый способ предусматриваете связи € этим линеаризацию полученной т оследовательности имнульсов, что обеспечивает плавность управления сервоприводами.
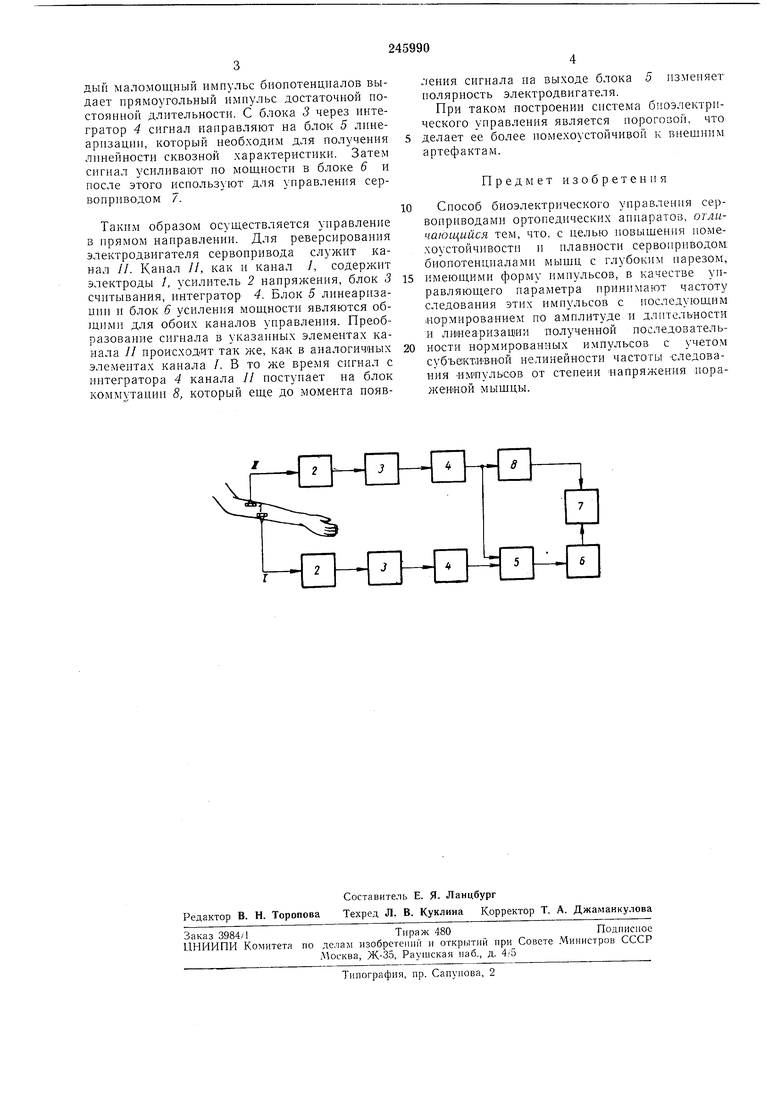
На чертеже представлена блок-схема, поясняющая предлагаемый способ.
Таким образом, предлагаемый способ биоэлектрического управления заключается в том, что в качестве управляющего параметра принимают частоту следования имнульсов бпоэлектрической активности с последующим нормированием по амплитуде длительности и линеаризации ползченной последовательности нормированных импульсов с учетом субъективной нелинейности частоты следования имиульсов от степени напряжения порал енпой мышцы.
Применительно к реверсив1юму биоэлектрическому управлению одним сервоприводом предлагаемый способ может быть осуществлен по следующей схеме. Используются два канала: канал / для управления в прямом направлении и канал // для управления з обратном направлении. В Ka ;:;ie / сигнал, отведенный от мыщц с иомошь;.о электродов / и усилениый предварительны:: С1зл 1теле 1 2 паиряжеиия, направляют в блок 3 считывания и преобразования импульсов, который на ккждыи маломощный импу.тьс биопотенциалов выдает прямоугольный импульс достаточной постоянной длительности. С блока 3 через интегратор 4 сигнал направляют на блок 5 лпнеарнзации, который необходим для получения линейности сквозной характеристики. Затем сигнал усиливают по мощности в блоке 6 и после этого используют для управления сервоприводом 7.
Таким образом осуществ.тяется управление в прямом направлении. Для реверсирования электродвигателя сервопривода служит канал //. Канал //, как п канал /, содержит электроды /, усилитель 2 напряжения, блок 3 считывания, интегратор 4. Блок 5 линеаризации и блок 6 усиления моишости являются общим) для обоих каналов управления. Преобразование сигнала в указанных элементах канала // происходит так же, ка-к в аналогичных элементах канала /. В то же время сигнал с интегратора 4 канала // иостуиает на блок коммутации 8, который еще до момента цоявления сигнала на выходе блока 5 изменяет полярность электродвигателя.
При таком построении система биоэлектрического управления является пороговой, что делает ее более помехоустойчивой к впещним артефактам.
Предмет изобретения
Способ биоэлектрического управления сервоприводами ортопедических аппаратов, отличающийся тем, что. с целью иовыщения помехоустойчивости и нлавности сервоприводом биопотенциалами мыщц с глубоким парезом,
имеющими форму импульсов, в качестве управляющего параметра принимают частоту следования этих импульсов с последующим нормированием по амплитуде и длительности и линеаризации полученной последовательности нормированных импульсов с учетом субъективной нелинейности частоты -следования «мпульсов от степени напряжения пораженшой мыщцы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1977 |
|
SU976952A2 |
| Способ биоэлектрического управления механизмами и устройствами | 1957 |
|
SU110657A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ БИОЭЛЕКТРИЧЕСКИХ ПРОТЕЗОВ | 1967 |
|
SU198524A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ОПЕРАТОРА | 1970 |
|
SU278024A1 |
| БИОЭЛЕКТРИЧЕСКИЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ НА ВЕРХНЮЮ КОНЕЧНОСТЬ | 1973 |
|
SU384520A1 |
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1976 |
|
SU929054A2 |
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1974 |
|
SU856436A1 |
| Устройство для управления биоэлектрическими протезами верхних конечностей | 1980 |
|
SU936908A1 |
| Способ коррекции функционального состояния жевательных мышц | 2020 |
|
RU2752710C1 |
| Способ диагностики возбудимости нервно-мышечных аппаратов и стимуляции мышц | 1960 |
|
SU147971A1 |
