I
Изобретение относится к области протезирования.
Известны биоэлектрические ортопедические аппараты на верхнюю конечность, содержащие манжеты предплечья и плеча, шарнкрно соединенные с помощью щин, наплечник и токосъемники, блок питания, электрический сервопривод, электронный узел управления и рычажный кистедержатель.
Известные аппараты недостаточно управляют сгибанием-разгибанием предплечья относительно плеча, имеют «изкую нагрузочную способность при поднятии и удержании груза и не обеспечивают активной механотерапии.
Предлагаемый аппарат отличается от известных тем, что с целью одновременного управления двумя парами двилсений, в нем установлен второй электрический сервопривод и логическое устройство, а в каждом канале помещен блок считывания импульсов, соединенный через интегратор с блоком коммутации, входы которых подсоединены ко входу логического устройства, обеспечивающего попеременное подключение к выходу системы управления приводов кистедержателя или локтевого механизма.
Для проведения активной механотерапии конечности аппарат оснащен блоком-переключателем режимов сгибания-разгибания в локтевом суставе с управляемого на автоматический, установленным между электронным узлом управления и релейно-реверсивным коммутатором, включающим, например, два параллельно соединенных электромагнитных реле с ограничительным резистором и два концевых выключателя на корпусе локтевого механизма.
Секторный замок выполнен с механизмом переключения, что повышает нагрузочную способность аппарата при поднятии и удержании груза.
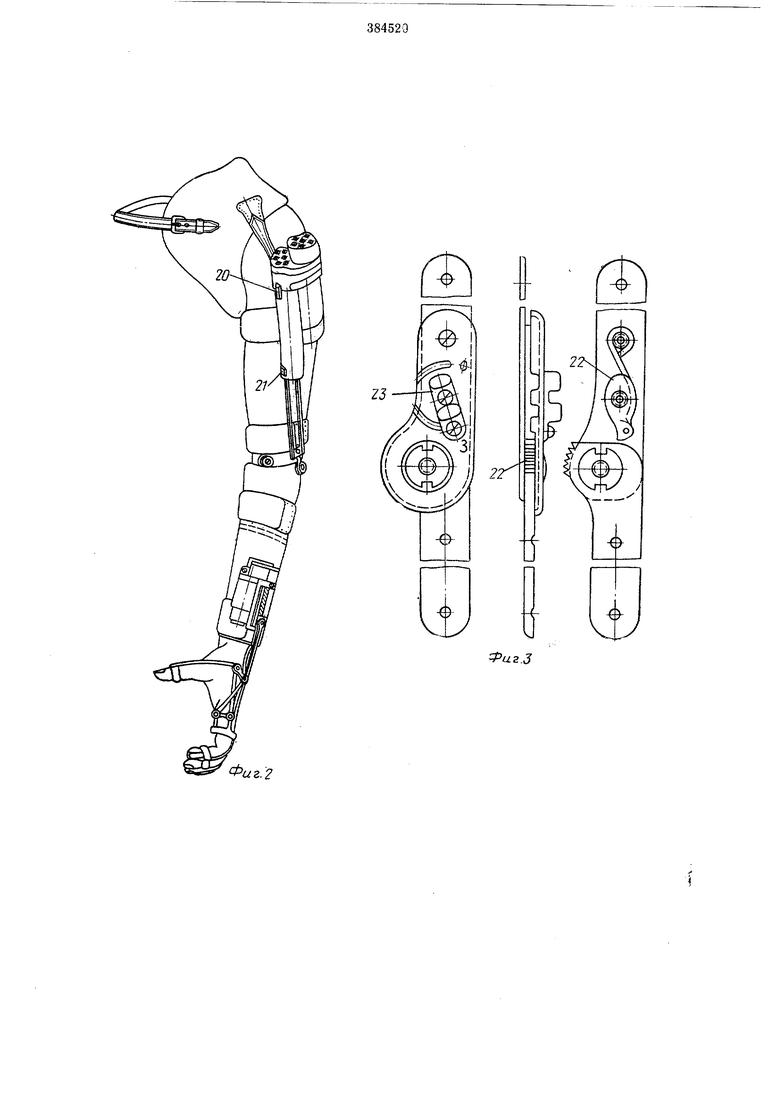
На фиг. 1 изображен описываемый аппарат в положении сгибания предплечья, общий вид; на фиг. 2 - то же, в положении разгибания
предплечья; на фиг. 3 - секторный замок, общий вид; на фиг. 4 - блок-схема биоэлектрической системы последовательного управления двумя парами движений; на фиг. 5 - принципиальная схема системы биоэлектрического
управления; на фиг. 6 - электрическая схема коммутации с переключателем на автоматическое сгибание и разгибание при разработке сустава. Биоэлектрический ортопедический аппарат
на верхнюю конечность содержит наплечник / (на фиг. 1); щарнирно соединенные шинами 2 и 5 манжеты 4, 5 плеча и предплечья; реверсивный электрический сервопривод 6 для кисти с выходной винтовой парой 7, взаимодействующей с рычажным кистедержателем 8;
второй электрический сервопривод 9 локтя, выходная пара которого выполнена также в виде винтовой пары с направляюпл.ими полуцилиндрическими поверхностями и тягой 10 перемещения шариира по оси выходного винта.
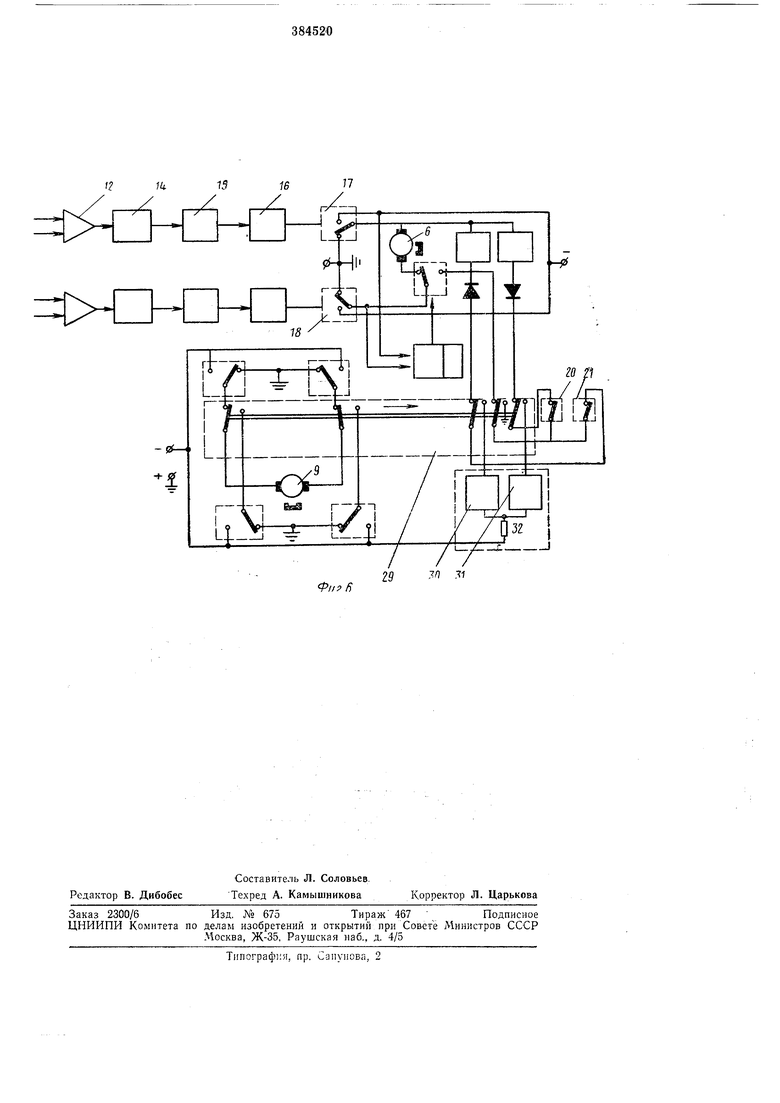
Аппарат снабжен также двухканальной системой управления с общим усилителем 11 мощности (фиг. 4). В каждом канале этой системы имеются усилитель 12 напряжения токосъем-ного устройства 13; блок 14 считывания импульсов; интегратор 15; блок 16 коммутации с реле реверсирования 17 и 18 сервопривода 6. В систему управления входит переключатель в виде логического устройства с выходным реле 19 (фиг. 5), переключающим управление с привода 6 кисти на сервопривод 9 локтя при появлении сигнала совместной активности обеих управляющих паретичных мь1щц:КрЬме того, всервоприводе 9 оппозитно установлены концевые нормально замкнутые микровыключатели 20 и 21 (фиг. 2).
Шарнирно соединенные щины 2 и 3 оснащены с внутренней стороны секторным замком 22, отключение которого возможно тольКО при полном сгибании с помощью механизма 23 отключения.
Усилители 12 напряжения каждого канала выполнены трехкаскадными с трансформаторами на входах блоки 16 коммутации - двухкаскадными, общий усилитель 11 мощности- трехкаскадным, а логическое устройство состоит из реле 24 (фиг. 5) с двумя входными цепями от обоих интеграторов 15 и симметричного триггера 25 с выходными реле 26 и 19.
Биоэлектрический сигнал усиливается усилителем 12 напряжения и поступает на ждущий мультивибратор блока 14 считывания импульсов. Импульсы последнего, сглаженные интегратором 15, управляют блоком 16 коммутации, выходные реле 17 и 18 которого своими контактами К 17 и К 18 коммутируют обмотку реверсивного электрического сервопривода 6 кисти пропорционально степени напряжения мыщд. В зависимости от того, по какому каналу,поступает сигнал управляющей мыщцы, вал,.электродвигателя привода вращается в одном или другом направлении.
При одновременной подаче сигналов по обеим .каналам срабатывает логическое устройство, д. реле25 своими контактами К 26 переключает систему в релейный режим, щунтируя .усилитель // мощности, а реле 19 контактами К 19 подключает к системе второй электрический серводривод 9 локтя, который управляется реле 17 и 18 непосредственно, если он той же мощности, что и реверсивный электрический сервопривод 6 кисти (фиг. 4), или реле 27 и 28 (фиг. 5), если он имеет больщую мощность. Система управления в случае неиспользования реле 26 (фиг. 5) может работать в пропорциональном .режиме.
Для выборочного срабатывания второго электрического сервопривода 9 локтя в автоматическом реверсивном режиме при использовании описываемого аппарата и для механотерапии разрабатываемого локтевого сустава служит переключатель 29 (фиг. 6) от биоэлектрической системы управления на автоматическое переключение фаз электродвигателя локтя (для разработки кисти аналогично) с помощью двух параллельно скоммутированных электромагнитных реле 30 и 31 например, типа РЭС-10, питаемых через ограниченный резистор 32, исключающий их совместное включение.
Предмет изобретения
1.Биоэлектрический ортопедический аппарат на верхнюю конечность, содержащий манжеты предплечья и плеча, щарнирно соединенные с помощью шин, наплечник и токосъемники, блок питания, электрический сервопривод, электронный узел управления и рычажный
кистедержатель, отличающийся тем, что, с целью одновременного управления двумя парами движений, в нем установлены второй электрический сервопривод и логическое устройство, а в каждом канале помещен блок считывания импульсов, соединенный через интегратор с блоком коммутации, входы которых подсоединены ко входу логического устройства, обеспечивающего попеременное подключение к выходу системы управления приводов кистедержателя или локтевого механизма.
2.Аппарат по п. 1, отличающийся тем, что, с целью обеспечения проведения активной механотерапии конечности, он оснащен блокомпереключателем режимов сгибания-разгибания в локтевом суставе с управляемого на автоматический, установленным между электронным узлом управления и релейно-реверсивным коммутатором, включающим, например, два параллельно соединенных электромагнитных реле с ограничительным резистором и два концевых выключателя на корпусе локтевого механизма.
3.Аппарат по п. 1, отличающийся тем, что, с целью повышения нагрузочной способности
аппарата при поднятии и удержании груза, секторный замок выполнен с механизмом отключения.
Фиг. 2
fuz.3

| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКИЙ АППАРАТ' | 1967 |
|
SU191054A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Многофункциональный активный протез руки | 1980 |
|
SU973121A1 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Протез плеча | 1989 |
|
SU1732967A1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ТРАВМЫ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ | 2013 |
|
RU2543286C1 |