Изобретением является способ биоэлектрического управления механизмами и устройствами,позволяющий осуществлять это управление по заданной программе.
Особенность способа заключается в том, что биопотенциалы мыщц, отводимые токосъемниками, усиливают с помощью электронных усилителей и используют их для приведения в действие управляемого механизма или устройства.
Усиленные биопотенциалы мышц преобразуют в последовательность дискретных импульсов, частота которых пропорциональна значению мощности биосигнала.
Снимают сигналы с двух мыщц; сумму и разность этих сигналов используют для управления двумя параметрами.
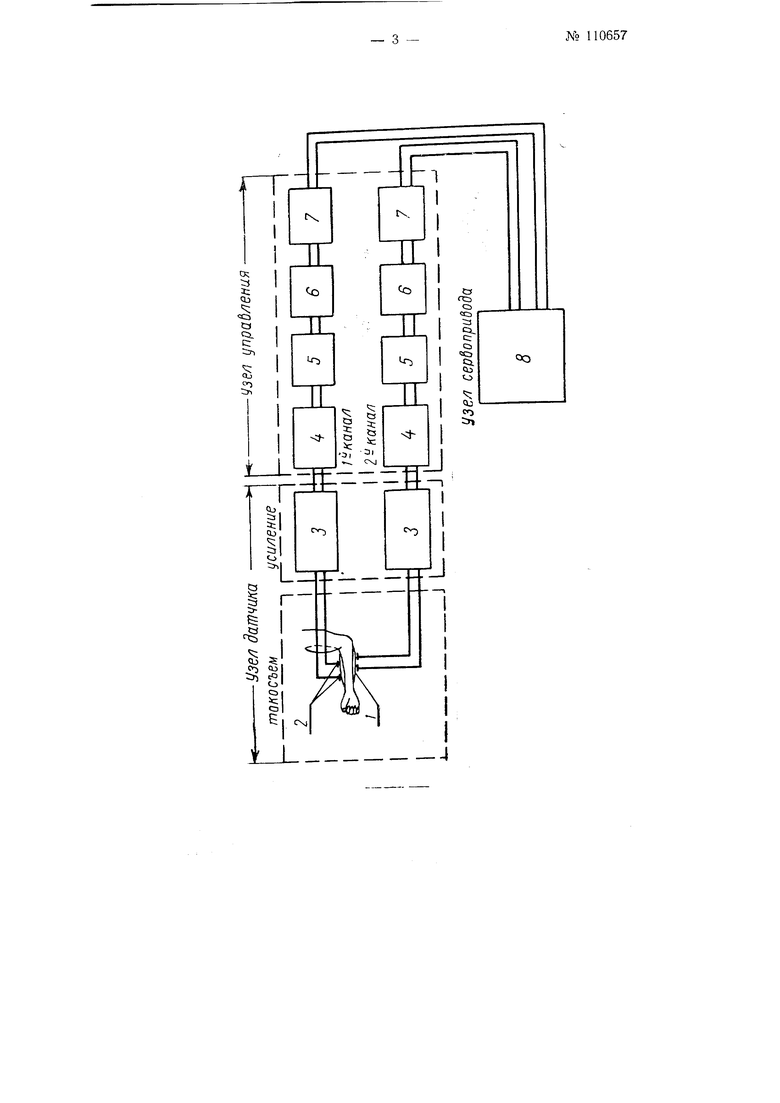
Способ осуществляется так (см. чертеж).
Биотоки мыщц 1 воспринимаются с помощью датчиков, состоящих из токосъемной и усилительной частей.
Токосъемная часть содержит биполярные накладные электроды 2,
закрепляемые на коже над используемыми мыщцами 1. Усилительная часть выполнена в виде трехкаскадного симметричного усилителя 3 переменного тока с питанием всех каскадов от электрической сети. Отведенные датчиками биопотенциалы мыщц, усиленные при помощи биоточного усилителя, подаются на преобразующее устройство, состоящее из ряда блоков. Входной блок 4 представляет собой дополнительный усилитель напряжения с фазовращающим выходом, обеспечивающим двухполупериодное выпрямление детектором 5. Продетектированное по амплитуде напряжение подается на суммирующий блок 6, в котором в качестве суммирующего устройства работает тиратрон с накопительным конденсатором. При повыщении напряжения на обкладках конденсатора до напряжения зажигания тиратрона конденсатор разряжается через тиратрон. Образующийся при этом импульс напряжения подается на блок 7 формирования импульсов в виде электронного реле с двумя устойчивыми состояниями. В анодные цепи тиратронов, работатощих в блоке 7, включены обмотки электромагнитлых муфт, управляющих анкерным механизмом сервопривода 8.
Таким образом, в узле управления осуществляется формирование дискретных сигналов из суммы асинхронных колебаний биопотенциалов мыщц. Число этих сигналов, постоянных по амплитуде, пропорционально величине напряжения, развиваемого мыщцей.
Из узла управления два потока дискретных сигналов направляются в электромагниты анкерных устройств, управляющих вращением колес дифференциала и выходного вала серводвигателя, осуществляющего управление приводом мащины, прибора или устройства.
Наличие в конструкции сервопривода 8 дифференциального механизма дает возможность одновременно использовать биотоки двух мыщц и тем самым обеспечить более гибкое управление движением ведомого вала сервопривода, в частности, реверс движепия при различных уровнях напряжения мыщц и Др.
Как следует из изложенного, а также из общеизвестных свойств дифференциальных механизмов, ве 1ичина и скорость перемещения ведомого звена сервопривода являются линейной функцией числа сигналов, поступающих из узла управления, и изменения этого числа с течением времени.
Предмет изобретения
1.Способ биоэлектрического управления механизмами и устройствами, отличающийся тем, что, с целью получения требуемой программы действия управляемого механизма или устройства, биопотенциалы мыщц, отводимые токосъемниками, усиливают с помощью электронных усилителей и используют их для приведения в действие управляемого механизма или устройства.
2.Способ по п. 1, отличающийся тем, что, с целью упрощения управления электромеханическими устройствами, усиленные биопотенциалы мышц преобразуют в последовательность дискретных импульсов, частота которых пропорциональна значению мощности биосигнала.
3.Способ по п. 1, отличающийся тем, что, с целью одновременного управления двумя параметрами, снимают сигналы с двух мыщц, а сумму и разность их используют для указанной цели, т. е. для управления двумя параметрами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод, управляемый биотоками мышц | 1958 |
|
SU118581A2 |
| Протез предплечья с электрическим сервоприводом, управляемый биотоками мышц, с устройством для ощущения силы схвата | 1958 |
|
SU120300A1 |
| Протез бедра с гидравлической системой | 1961 |
|
SU148484A1 |
| ПРОТЕЗ ПРЕДПЛЕЧБЯ, УПРАВЛЯЕМЫЙ БИОТОКАМИ МЬ[ШЦ | 1964 |
|
SU163718A1 |
| Импульсный способ обработки криволинейных поверхностей и профилей | 1950 |
|
SU108357A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ С БИОЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ | 1973 |
|
SU396112A1 |
| БИОЭЛЕКТРИЧЕСКИЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ НА ВЕРХНЮЮ КОНЕЧНОСТЬ | 1973 |
|
SU384520A1 |
| СИСТЕМА УПРАВЛЕИИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧИОСТЕЙ | 1970 |
|
SU278023A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| Устройство для управления многофункциональной искусственной кистью | 1973 |
|
SU484826A1 |