Известны емкостные электродвигатели, содержащие ротор, выоолненный в виде секторообразных .металлических пластин, соединенных между собой электрически и механически и помещев«ых между секторообразными пластинами статора, подключаемыми к источнику литания и расположенными параллельно пластинам ротора.
Однако известные электродвигатели не работают в асинхронном режиме.
В предлагаемом электродвигателе для обеспечения возможности работы его в асинхронных режимах параллельно статору включена цепочка из последовательно соединенных .полупроводникового диода и активного сопротивления, шунтированного емкостью, и последовательно с источником питания - индуктивное сопротивление.
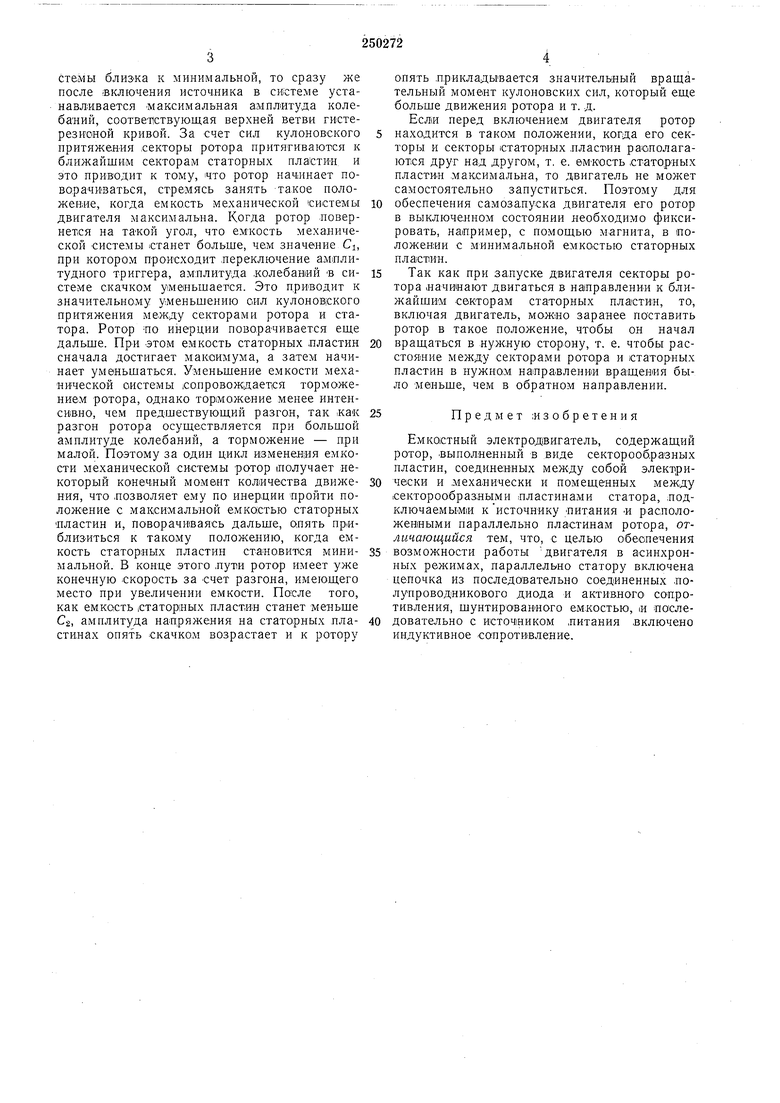
На фиг. 1 представлена схема онисываемого двигателя; на фиг. 2 - кривая зависимости амплитуды А напряжения на статорных пластинах от изменения взаимной емкости С вз статорных пластин.
Механическая система предлагаемого .двигателя представляет собой ко.нструкцию из сектороОбразных металлических пластин. При вращении ротора 1 двигателя происходит изменение взаимной электрической емкости его стато.рных лластин 2. Для упрощения чертежа статорные пластины состоят из одного
сектора, а роторная пластина - из двух секторов. На практике для увеЛИчения крутящего момента двигателя число секторов на статорных и роторных пластинах желательно увеличивать. Последовательно с источником питания 3 включена индуктивность 4, а лараллельно статорным пластинам - цепочка из последовательно соединенных плоскостного полуцроводникового диода 5 и активного сопротивления 6, шунтированного емкостью 7.
Параметры электрической схемы двигателя подобраны таким образом, чтобы она обладала свойствами амплитудного триггера. Во время работы двигателя происходит переключение триггера из одного состояния в другое, т. е. скачкообразное изменение амллитуды электрических колебаний в цепи. Это осуществляется за счет изменения взаимной емкости .статорных пластин при вращении ротора двигателя, причем при максимальной емкости механической системы двигателя амплитуда электрических колебаний на его статорных пластинах минимальна и наоборот. Зависимость амплитуды . напряжения на статорных пластинах от изменения их взаимной емкости имеет вид гистерезисной кривой (фиг. 2).
Двигатель работает .следующим 0:бразом.
схемы близка к минимальной, то сразу же после включения источника в системе устанавливается максимальная амплитуда колебаний, соотвепствующая верхней ветви гистерезисной кривой. За счет сил кулоновского притяжения .секторы ротора притягиваются к ближайшим секторам статорных пластин и это приводит к тому, что ротор начинает поворачиваться, стремясь занять такое положевие, когда емкость механической системы двигателя максимальна. Когда ротор ловернется на такой угол, что емкость механической системы станет больше, чем значение Ci, при котором происходит .переключение амплитудного триггера, амнлитуда .колебаний в системе скачком уменьшается. Это приводит к значительно.му уменьшению сил кулоновского притяжения между секторами ротора и статора. Ротор -по инерции пово.рачивается еше дальше. При этом емкость статорных .пластин сначала достигает макаил1ума, а затем начинает уменьшаться. Уменьшение емкости механической системы сопровождается торможением ротора, однако торможение менее интенсивно, чем предшествующий разго.н, так |Как разгон ротора осуществляется при большой амплитуде колебаний, а торможение - при малой. Поэтому за один цикл изменения емкости механической системы ротор (получает некоторый конечный момент количества движения, что позволяет ему по инерции пройти положение с максимальной емкостью статорных Пластин и, поворачиваясь дальше, опять приблизиться к такому положению, когда емкость статорных пластин ста«овит1ся минимальной. В конце этого .пути ротор имеет уже конечную скорость за счет разгона, имеющего место при увеличении емкости. После того, как емкость (Статорных пластин станет меньше Са, амплитуда напряжения на статорных пластинах опять скачком возрастает и к ротору
опять .прикладывается значительный вращательный момент кулоновских сил, который еще больше движения ротора и т. .д.
Если перед включением двигателя ротор находится в таком положении, когда его секторы и секторы статорных .пласт ин располагаются друг над другом, т. е. емкость статорных пластин максимальна, то двигатель не может самостоятельно запуститься. Поэтому для
обеспечения самозануска двигателя его ротор в выключенном состоянии необходимо фиксировать, например, с помощью магнита, в положении с минимальной емкостью статорных нластин.
Так как при запуске двигателя секторы ротора начинают двигаться в направлении к ближайшим секторам статорных нластин, то, включая двигатель, можно заранее поставить ротор в такое положение, чтобы он начал
вращаться в нужную сторону, т. е. чтобы расстояние между секторами ротора и статорных пластин в нужном направлении вращения было меньше, чем в обратном направлении.
Предмет изобретения
Емкостный электродвигатель, содержащий ротор, выпол:ненный в виде секторообразных пластин, соединенных между собой электрически и механически и помещенных между секторообразными пластина.ми статора, подключаемыми кисточнику питания и расположенными параллельно пластинам ротора, отличающийся тем, что, с целью обеспечения
возможности работы двигателя в асинхронных режимах, параллельно статору включена цепочка из последовательно соединенных полупроводникового диода и актив.ного сопротивления, шунтированного ем.костью, и последовательно с источником литания включено индуктивное сопротивление.
2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического удержания вала насосного агрегата | 1981 |
|
SU1029364A1 |
| СПОСОБ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2572097C1 |
| Электропривод переменного тока | 1990 |
|
SU1767687A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Электропривод для механизма с вентиляторным моментом нагрузки | 1987 |
|
SU1494190A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Однофазный асинхронный двигатель с фазным ротором | 2024 |
|
RU2840896C1 |
| Устройство для торможения многодвигательного электропривода переменного тока | 1982 |
|
SU1066011A1 |
| СПОСОБ ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ (ВАРИАНТЫ) | 1998 |
|
RU2182398C2 |
| Электростатический двигатель | 1981 |
|
SU952073A1 |
- Cfe
С,
