1 ;
Известны автоматические регуляторы загрузки глубинных двигателей привода долота, содержащие сервоцилиндры, насосы и блоки автоматики.
Однако в этих регуляторах, работающих по автономной схеме, наблюдается постоянное потребление мощности от глубинного двигателя «а привод насоса. Помимо загрузки мащины это приводит к перегреву рабочей жидкости гидросистемы регулятора. Вследствие этого исключается возможность быстродействующего регулирования.
Описываемый автоматический регулятор отличается тем, что он выполнен с насосом регулируемой производительности обратимого действия, регулировочный орган которого соединен с глубинным двигателем с помощью системы датчиков загрузки глубинного двигателя. Такое выполнение ускоряет процесс регулирования независимо от глубины бурения, уменьщает установленную мощность глубинного двигателя и наземного оборудования и облегчает запуск глубинного двигателя под нагрузкой.
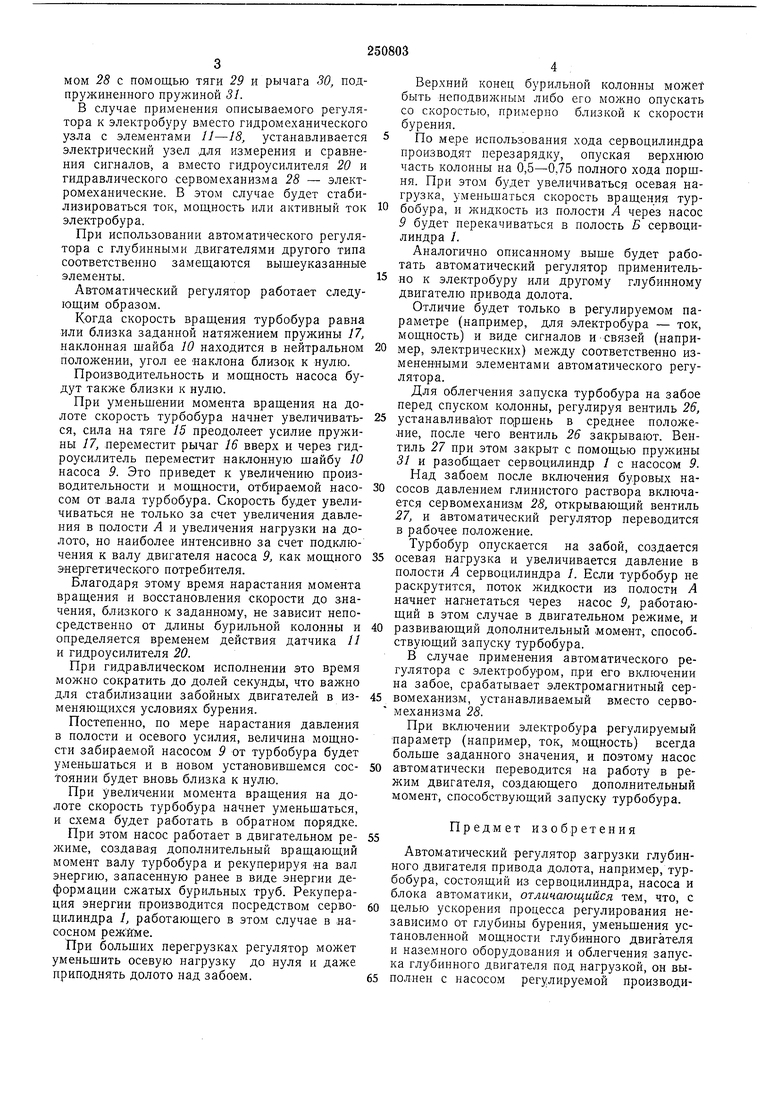
На фиг. 1 схематически изображен предлагаемый регулятор; на фиг. 2 - его принципиальная схема.
Устройство содержит сервоцилиндр 1, порщень 2 которого и щток 3 соединены с нижней частью бурильной колонны 4, а корпус сервоцилиндра - со статором 5 забойного
двигателя, удерживаемого от проворачивания под действием реактивного момента щтангой 6 с продольными пазами.
К валу 7 забойного двигателя непосредственно или через редуктор 8 присоединяется насос 9 переменной производительности, который может работать в насосном и двигательном режимах. В описываемом регуляторе применен насос
9 аксиально-поршневого типа с наклонной щайбой 10 для управления скоростью вращения турбобура.
Для измерения скорости вращения служит датчик 11 гидромеханический, центробежный
и др.), соединенный механической связью 12 с валом 7. Нагнетательная линия насоса датчика соединена трубопроводом 13 с сервомеханизмом 14, порщень которого через тягу 15 соединен с рычагом 16, подпружиненным пружиной 17, натяГ которой регулируется винтом 18.
Один конец рычага 16 закреплен щарниром 19 на статоре 5, а другой конец через гидроусилитель 20 связан с наклонной шайбой 10
насоса 9.
В гидролинии включены лубрикатор 21 через обратные клапаны 22 и 23, а также предохранительные клапаны 24 и 25 максимального давления , регулируемый 26 и запорный 27 MOM 28 с помощью тяги 29 и рычага 30, подпружиненного пружиной 31. В случае применения описываемого регулятора к электробуру вместо гидромеханического узла с элементами 11-18, устанавливается электрический узел для измерения и сравнения сигналов, а вместо гидроусилителя 20 и гидравлического сервомеханизма 28 - электромеханические. В этом случае будет стабилизироваться ток, мощность или активный ток электробура. При использовании автоматического регулятора с глубинными двигателями другого типа соответственно замещаются выщеуказаняые элементы. Автоматический регулятор работает следующим образом. Когда скорость вращения турбобура равна или близка заданной натял ;ением пружины 17, наклонная шайба 10 находится в нейтральном положении, угол ее иаклона близок к нулю. Производительность и мощность насоса будут также близки к нулю. При уменьшении момента вращения на долоте скорость турбобура начнет увеличиваться, сила на тяге 15 преодолеет усилие пружины 17, .переместит рычаг 16 вверх и через гидроусилитель переместит наклонную шайбу 10 насоса 9. Это приведет к увеличению производительности и мощности, отбираемой насосом от .вала турбобура. Скорость будет увеличиваться не только за счет увеличения давления в полости А и увеличения нагрузки на долото, но наиболее интенсивно за счет подключения к валу двигателя насоса 9, как мощного энергетического потребителя. Благодаря этому время нарастания момента вращения и восстановления скорости до значения, близкого к заданному, не зависит непосре.дственно от длины бурильной колонны и определяется временем действия датчика 11 и гидроусилителя 20. При гидравлическом исполнении это время можно сократить до долей секунды, что важно для стабилизации забойных двигателей в изменяющихся условиях бурения. Постепенно, по мере нарастания давления в полости и осевого усилия, величина мощности забираемой насосом 9 от турбобура будет уменьшаться и в новом устано.вивщемся соетоянии будет вновь близка к нулю. При увеличении момента вращения на долоте скорость турбобура начнет уменьшаться, и схема будет работать в обратном порядке. При этом насос работает в двигательном режиме, соз.давая дополнительный вращающий момент валу турбобура и рекуперируя «а вал энергию, запасенную ранее в виде энергии деформации сжатых бурильных труб. Рекуперация энергии производится посредством сервоцилиндра 1, работающего в этом случае в насосном режиме. Верхний конец бурильной колонны может быть неподвижным либо его можно опускать со скоростью, примерно близкой к скорости бурения. По мере использования хода сервоцилиндра производят перезарядку, опуская верхнюю часть колонны на 0,5-0,75 полного хода поршня. При этом будет увеличиваться осевая нагрузка, уменьшаться скорость вращения турбобура, и жидкость из полости А через насос 9 будет перекачиваться в полость Б сервоцилиндра /. Аналогично описанному .выше будет работать автоматический регулятор применительно к электробуру или другому глубинному двигателю привода долота. Отличие будет только в регулируемом параметре (например, для электробура - ток, мощность) и виде сигналов и-связей (например, электрических) между соответственно измененными элементами автоматического регулятора. Для облегчения запуска турбобура на забое перед спуском колонны, регулируя вентиль 26, устанавливают по1рщень в среднее положение, после чего вентиль 26 закрывают. Вентиль 27 при этом закрыт с помощью пружины 31 и разобщает сервоцилиндр / с насосом 9. Над забоем после включения буровых насосов давлением глинистого раствора включается сервомеханизм 28, открывающий вентиль 27, и автоматический регулятор переводится в рабочее положение. Турбобур опускается на забой, создается осевая нагрузка и увеличивается давление в полости Л сервоцилиндра /. Если турбобур не раскрутится, поток жидкости из полости А начнет нагнетаться через насос 9, работающий в этом случае в двигательном режиме, и развивающий дополнительный момент, способствующий запуску турбобура. В случае применения автоматического регулятора с электробуром, при его включении на забое, срабатывает электромагнитный сервомеханизм, устанавливаемый вместо сервомеханизма 28. При включении электробура регулируемый параметр (например, ток, мощ.ность) всегда больше заданного значения, и поэтому насос автоматически переводится на работу в режим двигателя, создающего дополнительный момент, способствующий запуску турбобура. Предмет изобретения Автоматический регулятор загрузки глубинного двигателя привода .долота, например, турбобура, состоящий из сервоцилиндра, насоса и блока автоматики, отличающийся тем, что, с целью ускорения процесса регулирования независимо от глубины бурения, уменьщения установленной мощности глубинного двигателя и наземного оборудования и облегчения запуска глубинного двигателя под нагрузкой, он выполнен с насосом регулируемой производи5тельности обратимого действия, регулировочный орган которого соединен с глубинным 6 двигателем с помощью системы датчиков загрузки глубинного двигателя.

fuz.
/2
9uz 2
