Известны бесконтактные шаговые следящие системы управления большим числом исполнительных устройств, состояш,ие из устройства управления, запоминающих и исполнительных устройств, электромагнитного усилителя, управляемых дросселей, схемы сравнения и эталонного датчика.
Описываемая бесконтактная шаговая следящая система отличается тем, что .в системе установлен датчик с тремя последовательно дейстБующими секторами, из .которых один - сектор .последовательного опроса - .подключен к за.поминающим и исполнительным устройствам, два других - секторы подстройки - подключены к устройству управления и управляемым дросселям, а непосредственная нодстройка .иополнителвных устройств осуществляется от электромагнитного усилителя с реверсируемой фазой, одна фаза которого прялю подсоединена к исполнительным щаговым двигателям, а другая (реверсируемая)-через управляемь ш дроссели, каждый из которых имеет четыре обмотки, на две из которых подаются сигналы с датчика секторов, а на две другие -сигналы с соответствующих магнитных т,ригге.ров запоминающих устройств.
Это позволяет уменьщить общее время иодстройки исполнительных устройств за счет осуществления последовательного о проса и параллельного исполнения всех команд, имеющих одинаковый знак рассогласования.
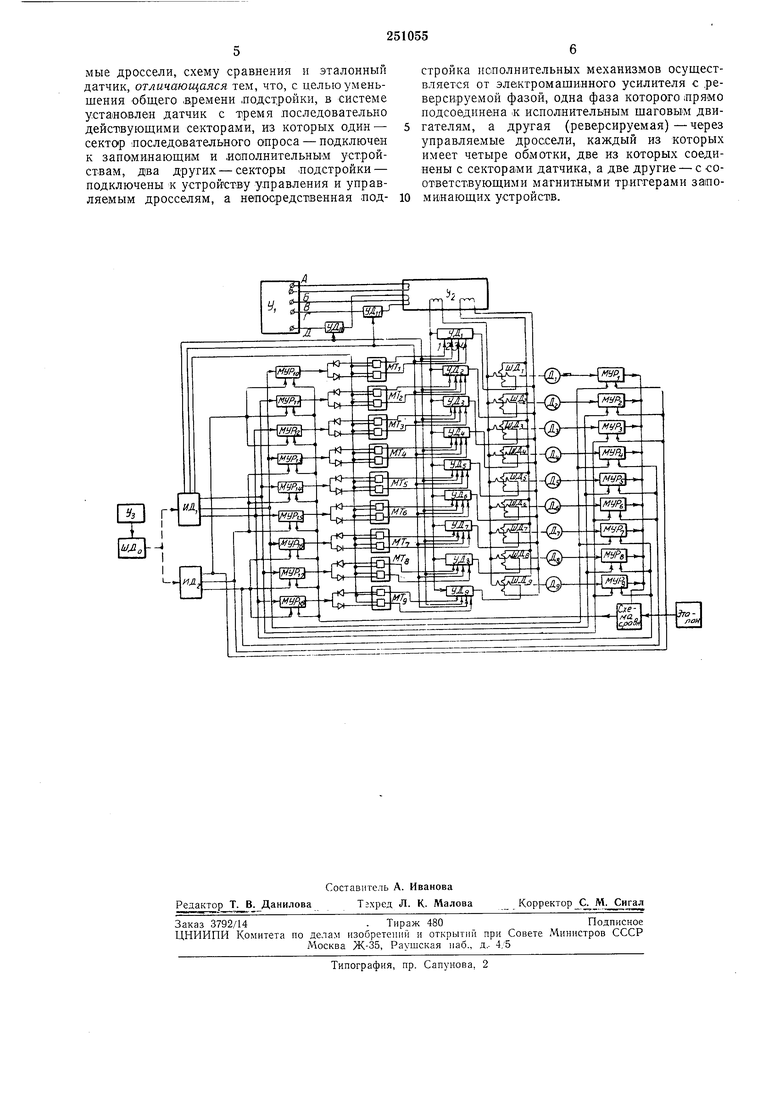
На чертеже П1}едставлена функциональная схема бесконтактной щаговой следящей системы.
Работа устройства заключается в следующем .
После включения системы с устройства управления У постоянно поступает управляющий сигнал «а исполнительный шаговый двигатель ZZ/До, Который, отрабатывая этот сигнал, обеспечивает вращение ротора датчиков ЯДх и ЯДа. Эти датчики .имеют три сектора: сектор опроса и два сектора подстройки. Во
время действия сектора опроса обеспечивается последовательное подключение 1подстраиваемых датчиков Дх - Дд через магнитоуправляе-мые реле МУР - МУРд к схеме сравнения, где производится сравнение .и онределяется знак
рассогласования между сигналами с соответствуюшего датчика и эталона. Все датчики Дх - Дэ и соответствующие mi магнито-управляемые реле разбиты на группы (в да.нном случае рассматриваются три группы). Номер
включаемой группы определяется сигналом с датчика ЯДг. Группы включаются последовательно по сигналу с датчика , ротор которого вращается от .двигателя Я/До.
и группы, датчики ,в группе включаются последовательно. Таким образом, когда включается первая группа, сигнал подается одновременно на все магнито-управляемые реле первой группы, т. е. на реле МУР - МУРз; ло сигналу с датчика ИД включаются, например, все яервые элементы во всех группах, в данном случае МУРь Л1УР4, МУРт. Поскольку только на магнито-унравляемые реле МУР одновременно пришел сипнал номера группы и номера элемента в группе, то только датчик Д подключается к .схеме сравнения, т. е. к эталону.
Сигнал знака разности со схемы сравнения подается одновременно на все магнито-управляемые реле МУРю - Этот сигнал лроходит через магнито-управляемое реле МУРю, так как только на входах этого элемента совпали сигналы номера группы и элемента в группе, и .поступает на запоминающее устройство M7i, состоящее из двух магнитных триггеров. В зависимости от знака разностного сигнала включается тот или иной триггер, что обеспечивается соответствующим включением диодов на входе магнитных триггеров.
После определения и запоминания знака разностного сигнала от первого датчика Д, к эталону подключается второй датчик Д и т. д., пока не будут лоследовааельно опрошены все датчики Д1 - Дэ. Затем осуществляется подстройка в два этапа.
При подстройке исполнительные щаговые двигатели ШД - Я/Дд обеспечивают перемещение подстраиваемого органа датчиков Д - Дэ соответственно на строго определенную величину - дискрет, что осуществляется лодачей определенного числа управляющих импульсов в обмотку исполнительных шаговых двигателей .
Управляющие имлульсы данной частоты, длительности и с заданным законом распределения формируются в управляющем устройстве Уа. С выхода этого устройства поступают разнополярные имлульсы.
Первая фаза (выход АБ не реверсируется.
На лервом этапе подстройки ло сигналу с датчика сектора ЯДх включается вторая реверсируемая фаза (выход ВГ). Комбинация управляющих сигналов с выхода управляющего устройства У обеспечивает положительное (левое) вращение вала исполнительных шаговых двигателей ШД- - ШД.
Для усиления сигналов по мощности используется электромашинный усилитель переменного тока с реверсируемой фазой.
Одна его фаза (нереверсируамая) непосредственно подключена к исполнительным шаговым двигателям ШД- ШДд, другая (реверсируемая)- через управляемые дроссели УД1 - . Управляемые дроссели УД1 - УДэ имеют четыре обмотки управления, на лервую и четвертую обмотки лодается сигнал с соответствующего магнитного триггера запоминающего устройства MTi - МТд на вторую и третью - сигнал с датчика сектора ЯДх- ИД.
Итак, с одной стороны, на первом этапе ло сигналу с датчика сектора ИД управляющее устройство УЬ а вместе с ним и электромашинный усилитель переменного тока обеспечивают положительное вращение вала исполнительных шаговых двигателей ШД - Я/Дд, с другой стороны, на соответствующие управляемые дроссели УД1 - УДэ с запоминающего устройства MTi - МТд поступает сигнал о том, что для подстройки данного датчика необходимо вал исполнительного щагового двигателя Я/Д1 - Я/Дэ вращать в положительном направлении.
В случае совпадения на обмотках управления управляемого дросселя УД знака сигнала с датчика сектора ИД и с запоминающего устройства МТ, вторая фаза исполнительного шагового двигателя Я/Д подключается к электромашиниому усилителю переменного тока, и вал двигателя ШД поворачивается в заданно(м направлении на строго определенный угол. Поскольку частота работы управляющего устройства УЗ определена, то угол поворота вала исполнительного щагового двигателя ШД определяется только временем присутствия сигнала с датчика сектора ИД. Зона возможного ухода параметров разбивается на равные «шаги --дискреты, величина которых не превышает точности подстройки.
На втором этапе подстройки с датчика секTOipa ЯД1 включается фаза ДГ управляющего устройства УЗ. Комбинация сигналов фазы АБ и ДГ обеспечивает отрицательное (лравое) вращение валов исполнительных щаговых двигателей ИД-i - ЯДэ. Подключение реверсируемой фазы электромашинного усилителя к исполнительным шаговым двигателям ЯДх - ЯДэ происходит через управляемые дроссели УД1 - УДд, на обмотках которых совпали знаки сигналов с датчика сектора ЯДх и запоминающего устройства МТ.
После окончания подстройки вновь с датчика сектора ЯДх поступает сигнал на подстройку, и цикл повторяется.
До поступления сигнала на подстройку необходимо все триггеры в запоминающих устройствах MTi - MTg выставить в исходное нулевое состояние, что осуществляется ло сигналу «установка с датчика ЯДь
Таким образом, быстрый опрос, т. е. последовательное подключение датчиков Д1 - Дд к эталону, определение и запоминание разностного сигнала, а затем параллельная подстройка датчиков Дх - Дд в два этапа, позволили с одной стороны уменьшить габариты системы подстройки, с другой - существенно уменьшить общее время подстройки.
Предмет изобретения
Бесконтактная шаговая следящая система управления больщим числом исполнительных устройств, содержащая устройство управления, запоминающие и исполнительные устройства, электромагнитный усилитель, управлявмые дроссели, схему сравнения и эталонный датчик, отличающаяся тем, что, с целью уменьшения общего дремени .подстройки, в системе установлен датчик с тремя последовательно действующими секторами, из которых один - сектор лоследавательного опроса - подключен к запоминающим и исполнительным устройствам, два других - секторы -подстройки - подключены к устройству управления и управляемым дросселям, а непосредственная подстройка исполнительных механизмов осуществляется от электромашинного усилителя с реверсируемой фазой, одна фаза которого лрямо подсоединена к исполнительным щаговым двигателям, а другая (реверсируемая)-через управляемые дроссели, каждый из которых имеет четыре обмотки, две из которых соединены с ceKTOpaiMH датчика, а две другие-с соответствующими магнитными триггерами запоминающих устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ПООЧЕРЕДНОГО УПРАВЛЕНИЯ n-ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ | 1967 |
|
SU224638A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ п ШАГОВЫМИ ДВИГАТЕЛЯМИ | 1972 |
|
SU335666A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО | 1966 |
|
SU178773A1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1987 |
|
SU1415401A1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1986 |
|
SU1370480A1 |
| УСТРОЙСТВО ДЛЯ ФИЗИЧЕСКОГО МОДЕЛИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ СХЕМ | 1969 |
|
SU255665A1 |
| Линейный шаговый привод | 1973 |
|
SU477820A1 |
| Датчик угла поворота ведущего вала по отношению к ведомому | 1964 |
|
SU438991A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ ТЕЛЕМЕХАНИКИ | 1973 |
|
SU386422A1 |
| УДК - | 1973 |
|
SU372718A1 |
fffiT
