Уст ройство относится к цифро-аналоговым преобразователям, применяемым в системах а втомат ичеокогс1 |регул1И1рования.
Иэвесхны цифровые ,ПрИ1воды, ,в корпусе коTQpbLx установлены воэвраиный электро-магяит и ра|бочие электро-магниты с Я1карЯ1МИ возвратнонпоступательного движения.
Опи1сы1вавмый привод в отличие от известных ооде|ржит подвижные столы и толкатели, Пе|ремещающиеся относительно рабочих электр1омагнитав, за1К1реплеННьгх неподвижно в корпусе лривюда.
Такое (Выполнение позволяет они:зить потребляемую мощность при1вода и повысить е-то надежность.
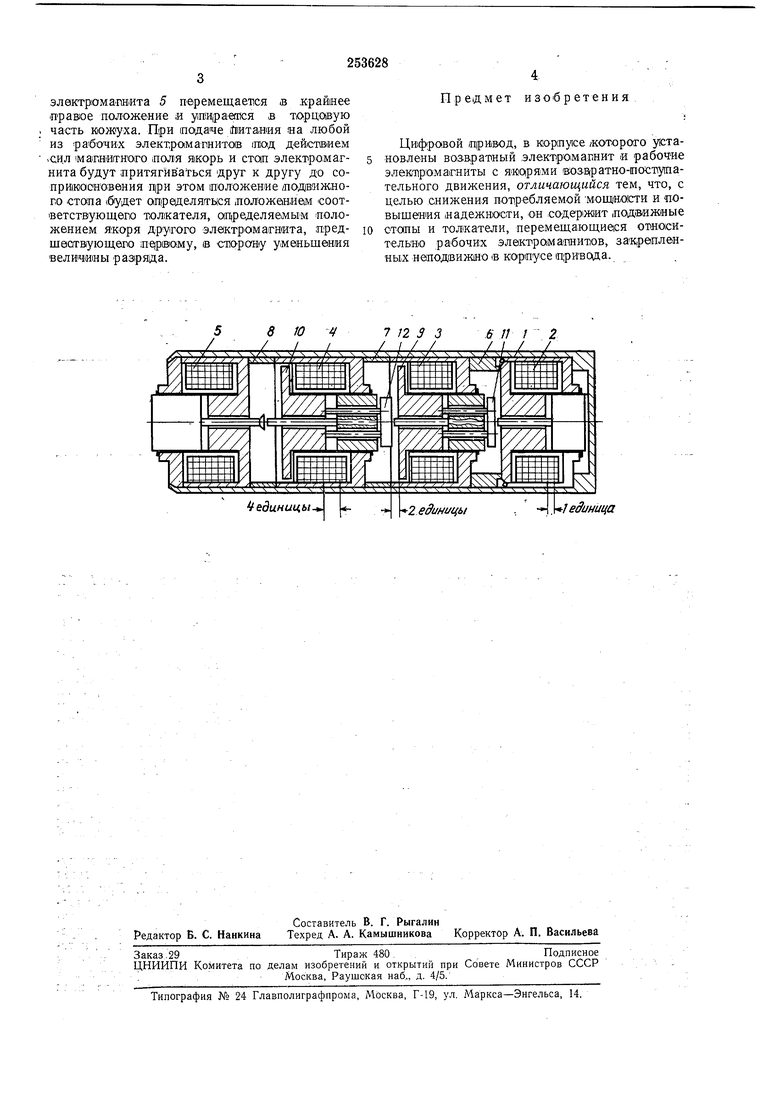
На чертеже схаматичеаки ,изоб(ражен описываемый 1Пр.И.ВОД.
Он содержит немагдитшый ,кожух (корпус) 1, электромагниты 2, 3 т 4 -с якорями возвратно-поступательного движения и возвратный электромапнит 5.
Крайний элект|ромагнит 2 заК|реплен с отото конца Kotpnyica.
Рядом с яим .рааполагаются электромагниты 3 и 4, которые В|месте с обмотками закреплены нвп оиеижно в общем крршусе и разделены .между собой втулками 6, 7, 8.
там корпусов и немагнитные толкатели //, 12, два стержня которых проходят через отверстия в соответствующих якорях.
(Количество рабочих электромагнитов выбирается в зависимости от требуемого числа положений (привода. Якарь возв(ра11ного электромагнита 5 совмещен с выходным стержнем.
Рабочий ход электромагнита 2 равен одной единице, рабочий ход электрома гнита 3 - двум единицам, электромагнита 4 - четырем и т. д., т. е. десятичному значению каждого последующего двоичного числа.
Рабочие ходы электромагнитов с подвижным стопом о;п рвделяются как разность длины стержня толкателя и дл1ины якоря соответствующего элект|рО|малнита. Ход якоря возвратного электромагнита, жоторый может быть за1менен пружинным механизмом, больще суммарного рабочего хода элекцромапнитов 2, 3 п4.
В несходном состоянии Числе, раино,м нулю, шток якоря электрО|Магн1Ита 5 упирается в шток якдря элект|ро.марнита 4. При этом якорь электрома1гнита 4 упирается в диск толкателя 12, а последний - в шток якоря электромапнита 3. Якорь эл-вкТ(ромагнита 3 упирается iOBOHiM торцом в диск толкателя 11, который, в свою очередь, упирается в шток якоря электромагнита 2. ЯкО|рь электромагнита 2 под действием сил .электромагаитного поля
электромапнита 5 перемещаепся s крайнее правое положение и yiniHjpaefflCH в торцовую часть кожуха. При иодаче Иитавия иа любой из рабочих электромагнитов (пад действием ,си.л 1маг.н«1ТНО1го (ПОЛ1Я Я1корь и стоп электромагнита будут притягйваться друг к другу до соприиоснО-вения цри этом положение яод вижного стопа (будет оцределятися лоложовием соответствующего тол1кателя, оцределяемым положением якоря другого электромагнита, предшествующего meipiBioMy, е стюрову умеяьщения величины разряда.
Предмет изобретения
Цифровой 1при1вод, в корпусе /которого уктановлены возвратный электгромашит и рабочие элект|ро:ма1гниты с якорями (ратно-1пост1ушательного движения, отличающийся тем, что, с целью снижения потребляемой мощно сти и «повышения «адежнюсти, ов содерж1ит подв ижмые отапы и толкатели, перемещающие1ся огаосительно рабочих электромагнитов, зак,рвплбнных неподвижно (В корпусе щривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитогидравлический толкатель | 1987 |
|
SU1461752A1 |
| Магнитогидравлический толкатель | 1982 |
|
SU1180348A2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 1998 |
|
RU2138721C1 |
| Электропривод стрелочного перевода | 1987 |
|
SU1527061A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| КОММУТАЦИОННОЕ УСТРОЙСТВО | 1969 |
|
SU238638A1 |
| Электромагнитный клапан | 1989 |
|
SU1675608A1 |
| ЭЛЕКТРОМАГНИТ | 1998 |
|
RU2138091C1 |
| Импульсный электромагнитный клапан (варианты) | 2021 |
|
RU2778999C1 |
| Электрогидравлический толкатель | 1987 |
|
SU1411269A1 |
7 /2 S J / I / / .6- /; / 2 L / / Н 1 единица
