Известны устройства для точной остановки подвижного узла, например, стола фрезерного станка.
Начало замедления подвижного узла в этих устройствах определяется с помощью механических устройств или систем механических упоров. Однако эти устройства очень громоздки и для обеспечения оптимального режима останова требуют механической переналадки в зависимости от скорости перемещения подвижного узла.
Предлагаемое устройство обеспечивает оптимальный выбор позиции начала замедления перемещения подвижного узла, непрерывность слежения за перемещением в процессе замедления и точную остановку подвижного узла в заранее заданной позиции.
Для этого к выходам датчика .подключены логический элемент с цикловым реле и фазочувствительный усилитель, осуществляющий управление скоростью исполнительного двигателя от начала замедления до точной остановки.
Первоначальная электрическая юстировка производится по одпому произвольно выбранному реперу.
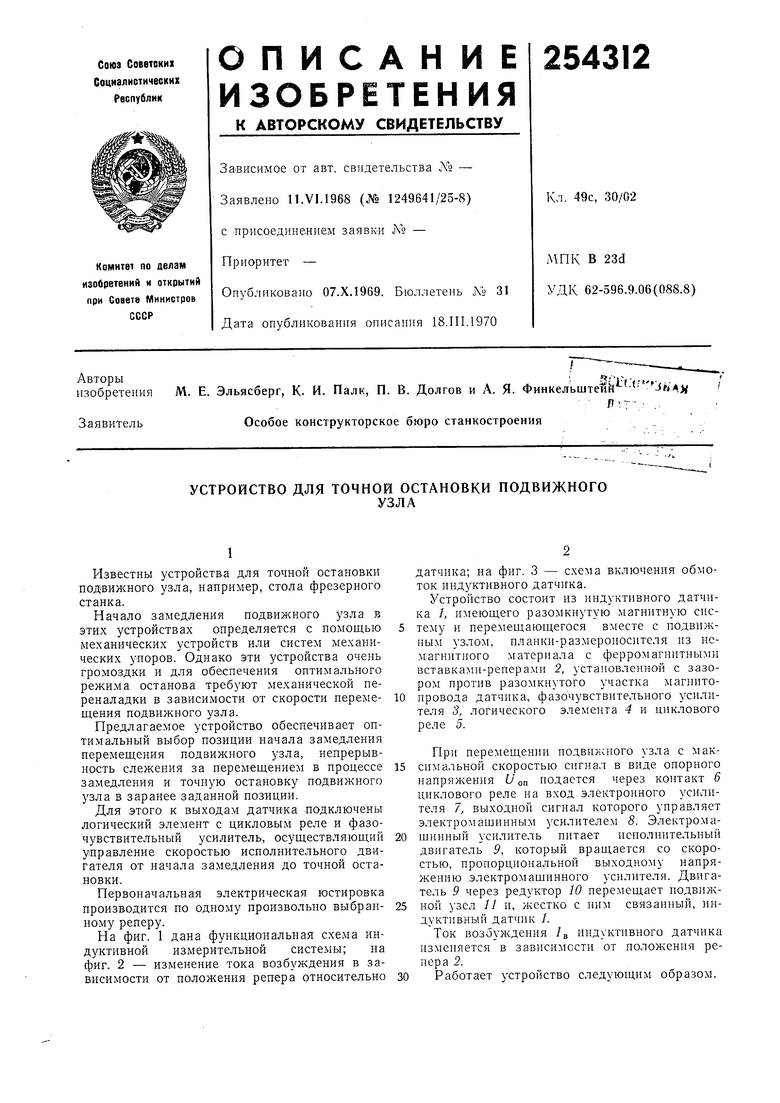
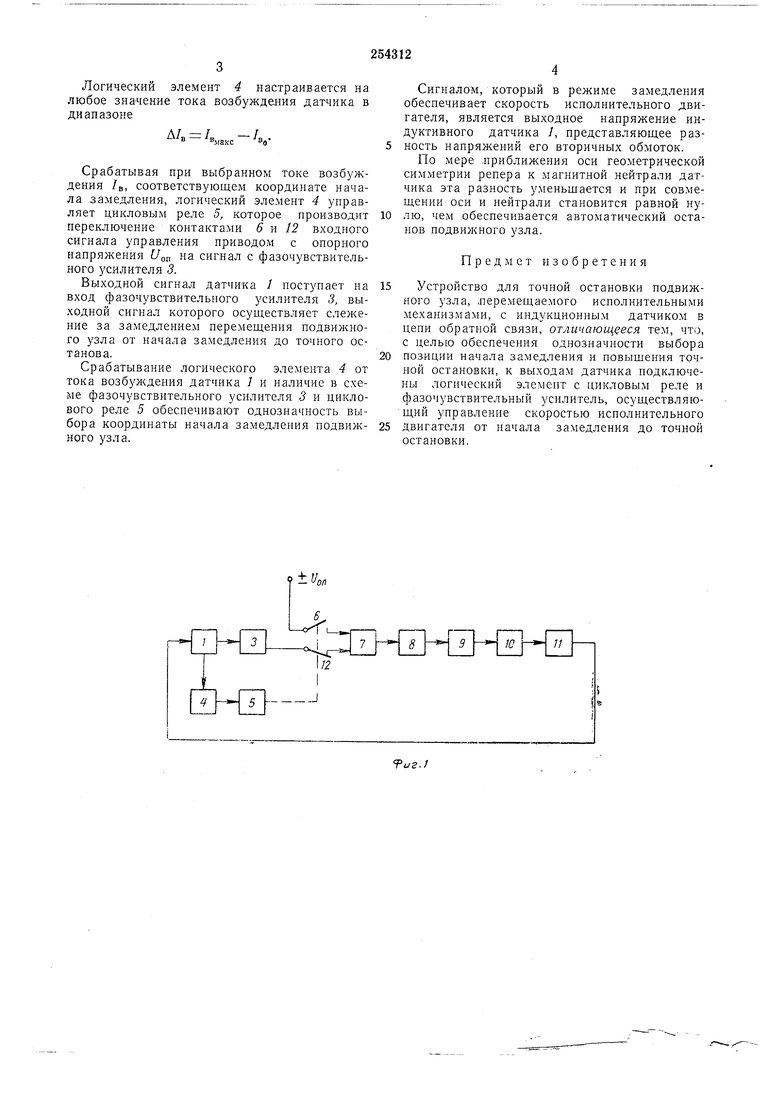
На фиг. 1 дана функциональная схема индуктивной измерительной системы; на фиг. 2 - изменение тока возбуждения в зависимости от положения репера относительно
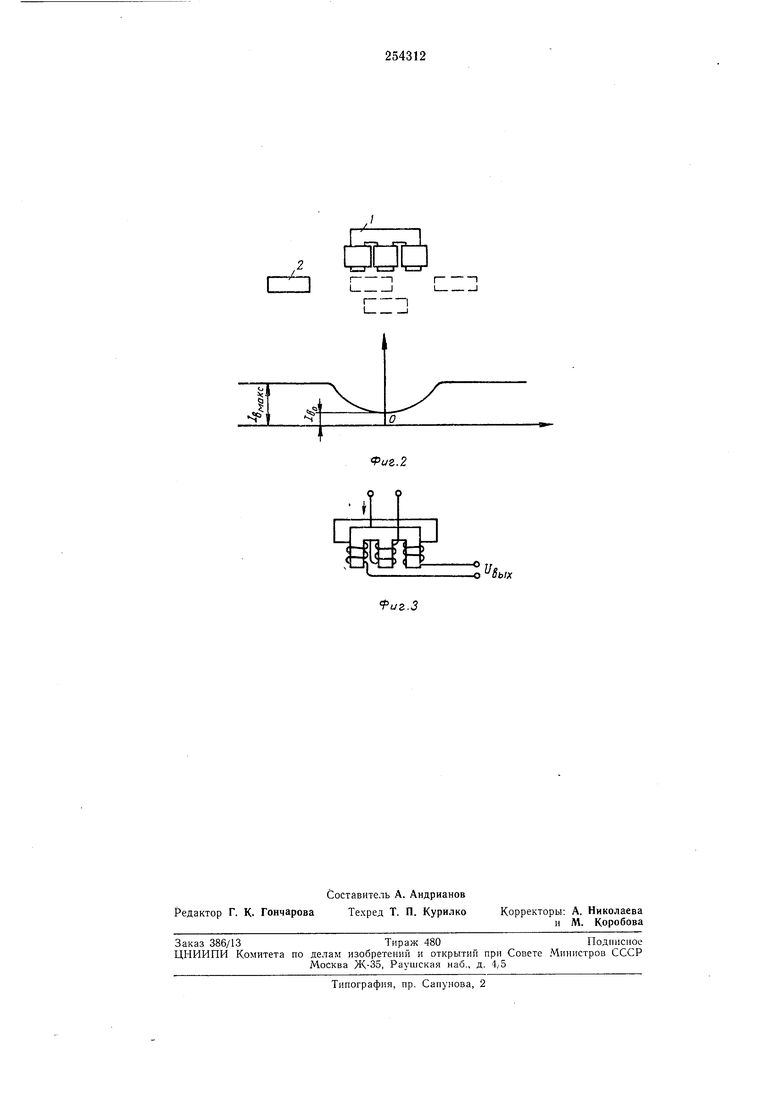
датчика; на фиг. 3 - схема включения обмоток индуктивного .
Устройство состоит из индуктивного датчика 1, имеющего разомкнутую магнитную систему и перемещающегося вместе с подвижным узлом, планки-размероносителя из немагнитного материала с ферромагнитными вставками-реперами 2, установленной с зазором против разомкнутого участка магнитопровода датчика, фазочувствительного усилителя 3, логического элемента 4 н циклового реле 5.
При перемещении подвижного узла с макснмальной скоростью сигнал в виде опорного напряжения Uon подается через контакт 6 циклового реле на вход электронного усилителя 7, выходной сигнал которого управляет электромашинным усилителем 8. Электромашинный усилитель питает исполнительный двигатель 9, который вращается со скоростью, пропорциональной выходному напряжению электромашннного усилителя. Двигатель 9 через редуктор 10 перемещает нодвижной узел 11 и, жестко с ним связанный, индуктивный датчик 1.
Ток возбуждения /в индуктивного датчика изменяется в зависимости от положения репера 2.
Логический элемент 4 настраивается на любое значение тока возбуждения датчика в диапазоне
А/ / -/в макс в
Срабатывая при выбранном токе возбуждения /в, соответствующем координате начала замедления, логический элемент 4 управляет цикловым реле 5, которое производит переключение контактами 6 и 12 входного сигнала управления приводом с опорного напряжения t/on на сигнал с фазочувствительного усилителя 3.
Выходной сигнал датчика / поступает иа вход фазочувствительного усилителя 3, выходной сигнал которого осуществляет слежение за замедлением перемещения подвижного узла от начала замедления до точного останова.
Срабатывание логического элемента 4 от тока возбзждения датчика 1 и наличие в схеме фазочувствительного усилителя 3 и циклового реле 5 обеспечивают однозначность выбора координаты начала замедления подвижного узла.
Сигналом, который в режиме замедления обеспечивает скорость исполнительного двигателя, является выходное напряжение индуктивного датчика 1, представляющее разность напряжений его вторичных обмоток.
По мере -приближения оси геометрической симметрии репера к магнитной нейтрали датчика эта разность уменьшается и при совмещении оси и нейтрали становится равной нулю, чем обеспечивается автоматический останов подвижного узла.
Предмет изобретения
Устройство для точной остановки подвижного узла, /перемещаемого исполнительными механизмами, с индукционным датчиком в цепи обратной связи, отличающееся тем, что, с целью обеспечения однозначности выбора
позиции начала замедления и повышения точной остановки, к выходам датчика подключены логический элемент с цикловым реле и фазочувствительный уснлитель, осуществляющий управление скоростью иснолнительного
двигателя от начала замедления до точной остановки.
CI±