1
Изобретение относится к области станкостроения.
По основному авт. св. № 254312 известно устройство для точной остановки подвижного узла. Недостатком известного устройства является низкая точность при использовании его для позиционирования вращающегося узла относительно неподвижного.
В предлагаемом устройстве автоматическое позиционирова«ие вращающегося узла относительно неподвижного достигается за счет того, что на одном из узлов, например вращающемся, попарно диаметрально противоположно закреплены магниточувствительны-е вставки, а на неподвижном узле диаметрально противоположно закреплены с зазором относительно вставок основной и дополнительный дифференциально-трансформаторные датчики с разомкнутой магнитной системой.
Магниточувствительные вставки закреплены по периферии вращающегося узла так, что при обходе узла в любом направлении угол между соседними вставками (реперами), равен, например, 90°. На неповоротной части, например на верхних санях, закреплен дифференциально-трансформаторный датчик.
Датчик электрически соедине): с автономным фазочувствительным усилителем, выход которого электрически соединен с сумматором, а результирующий сигнал через коммутатор подан на вход привода для управления им от начала замедления до останова.
За счет применения дополнительного днфференциально-трансформаторного датчика, расположенного на одном диаметре с основным и также закрепленного на верхних санях, достигается устранение влияния биения центрального подщипника. Дополнительный датчик электрически соединен с дополнительны.м фазочувствительным усилителем. Выходы фазочувствительных усилителей основного и дополнительного соединения и результирующий сигнал равен алгебраической сумме их сигналов. Результирующий сигнал управляет приводом н определяет собой направление и скорость перемещения вращающегося узла.
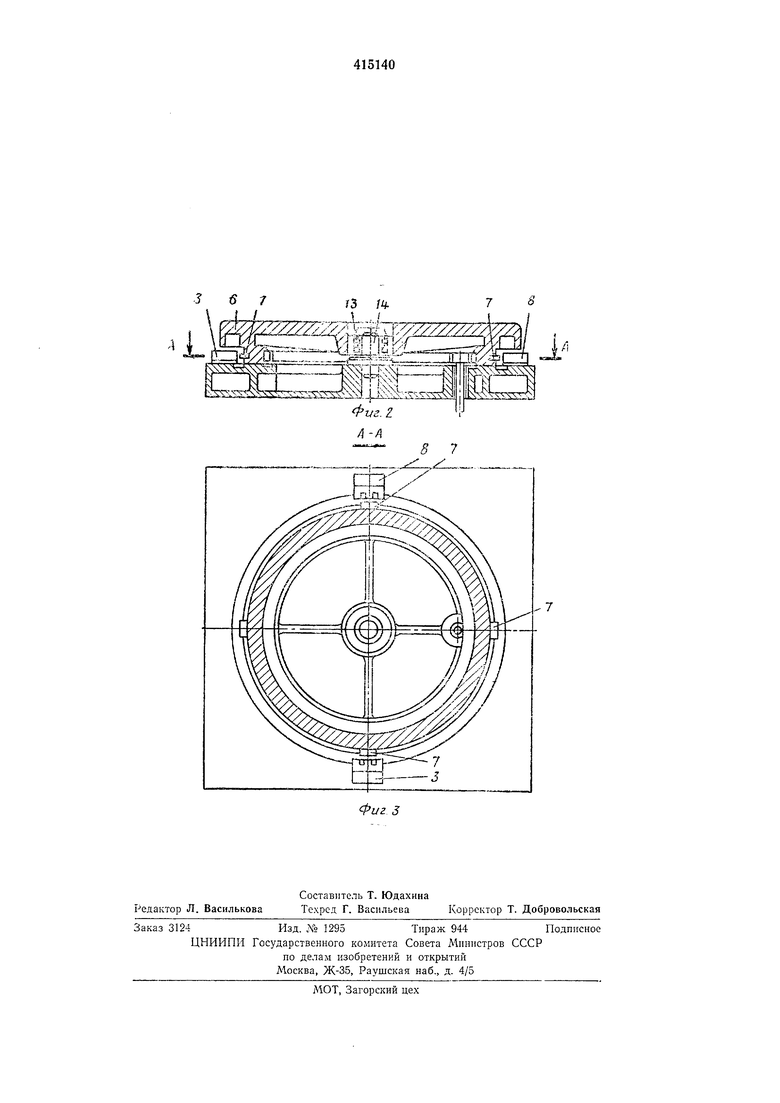
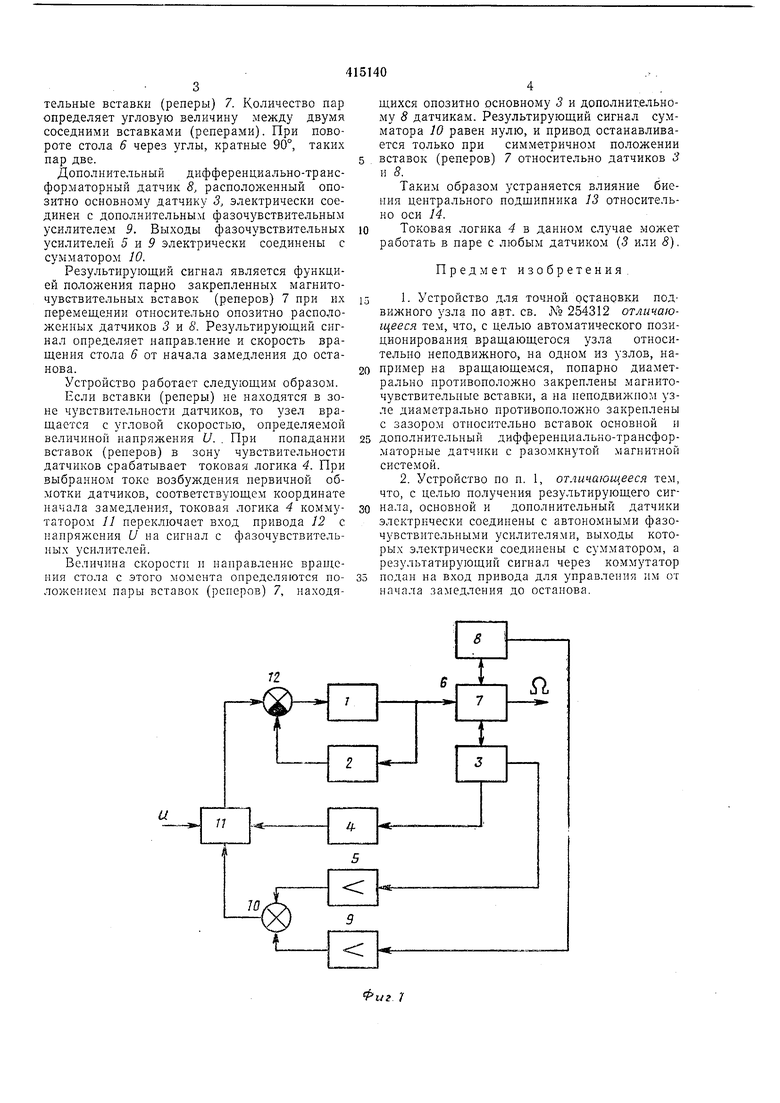
На . 1 изображена функциональная схема следящей системы автоматического позиционирования; на фиг. 2-продольный разрез поворотного стола со средствами измерения утла поворота; ita фиг. 3-разрез по .4-.4 на фиг. 2.
Устройство для точной остановки подвижного узла содержит автоматизированный привод 1 с отрицательной обратной связью 2, дифференцпалыю-трансформаторньтйдатчик 3, токовую логику 4, и фазочувствительный усилитель 5. Па вращающемся столе 6 закренлены попарно на диаметре, проходящем
через ось вращения стола, магннточувствительные вставки (реперы) 7. Количество пар определяет угловую величину между двумя соседними вставками (реперами). При повороте стола 6 через углы, кратные 90°, таких пар две.
Дополнительный дифференциально-трансформаторный датчик 8, расположенный опозитно основному датчику 3, электрически соединен с дополнительным фазочувствительным усилителем 9. Выходы фазочувствительных усилителей 5 и 9 электрически соединены с сумматором 10.
Результирующий сигнал является функцией положения парно закрепленных магниточувствительных вставок (реперов) 7 при их перемещении относительно опозитно расположенных датчиков 3 и 8. Результирующий сигнал определяет направление и скорость вращения стола 6 от начала замедления до останова.
Устройство работает следующим образом.
Если вставки (реперы) не находятся в зоне чувствительности датчиков, то узел вращается с угловой скоростью, определяемой величиной напряжения U. . При попадании вставок (реперов) в зону чувствительности датчиков срабатывает токовая логика 4. При выбранном токе возбуждения первичной обмотки датчиков, соответствующем координате начала замедления, токовая логика 4 коммутатором 11 переключает вход привода 12 с напряжения U на сигнал с фазочувствительных усилителей.
Величина скорости и направление Bpauteния стола с этого момента определяются положением пары вставок (реперов) 7, находяГ2
ги
щихся опозитно основному 3 и дополнительному 8 датчикам. Результирующий сигнал сумматора 10 равен нулю, и привод останавливается только при симметричном положении
вставок (реперов) 7 относительно датчиков 3 и g.
Таким образом устраняется влияние биения центрального подщипника 13 относительно оси 14.
Токовая логика 4 в данном случае .может работать в паре с любым датчиком (3 или 8).
Предмет изобретения.
1. Устройство для точной остановки подвижного узла по авт. св. N° 254312 отличающееся тем, что, с целью автоматического позиционирования вращающегося узла относительно неподвижного, на одном из узлов, например на вращающемся, попарно диаметрально противоположно закреплены магниточувствительпые вставки, а на неподвижном узле диаметрально противоположно закреплены с зазором относительно вставок основной и
дополнительный дифференциально-трансфор.маторные датчики с разомкнутой магнитной системой.
2. Устройство по п. 1, отличающееся тем, что, с целью получения результирующего сигнала, основной и дополнительный датчики электрически соединены с автономными фазочувствительными усилителями, выходы которых электрически соединены с сумматором, а результатирующий сигнал через коммутатор
подан на вход привода для управления им от начала замедления до останова.
Фиг 1
3
7
Фиг 3
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ТОЧНОЙ ОСТАНОВКИ подвижногоУЗЛА | 1969 |
|
SU254312A1 |
| Датчик положения вращающегося узла отнносительно неподвижного | 1972 |
|
SU474428A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ПОТОКА ВОДЫ | 1972 |
|
SU357550A1 |
| Устройство для автоматического управления процессом вытягивания заготовки в горизонтальной установке непрерывной разливки металлов | 1980 |
|
SU954165A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| Устройство для управления вентильным преобразователем | 1981 |
|
SU987779A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО ТОКА | 1992 |
|
RU2037185C1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1428935A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| КОНДУКТОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 1968 |
|
SU208323A1 |