Известен способ управления электроприводом, например, крановых механизмов с двумя аси11хроппьп(и электродвигателями, валы которых .имеют мехаипческий тормоз и соединены с входными валами дифференциального редуктора, нричем один из двигателей выполнен многоскоростным и может реверсироваться, а другой - односкоростпым и управляется со стороны статора (ротора).
Предложеии1И| | электропривод имеет более высокую точность остановки и плавность пуска и перехода с рабочей скоростп на ползучую. Это обеспечивается тем, что обмотку статора одиоскоростиого двигателя подключают к источнику постоянного тока, а двухскоростной двигатель переключают на обмотку малой скорости.
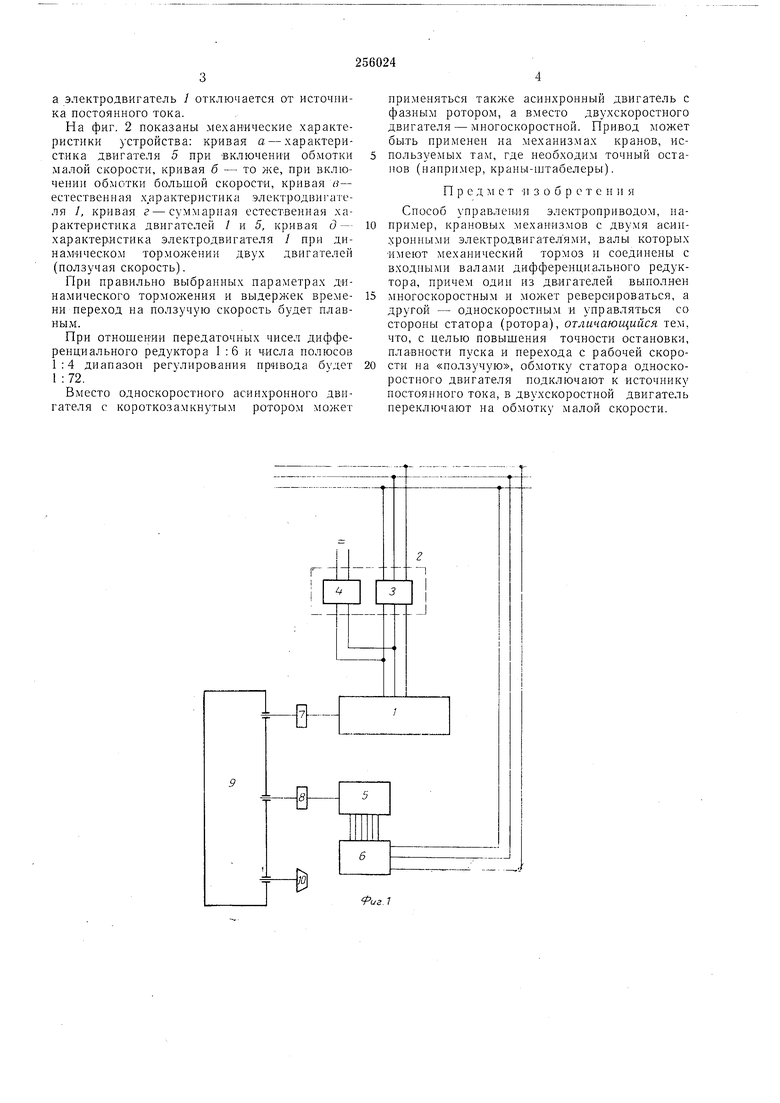
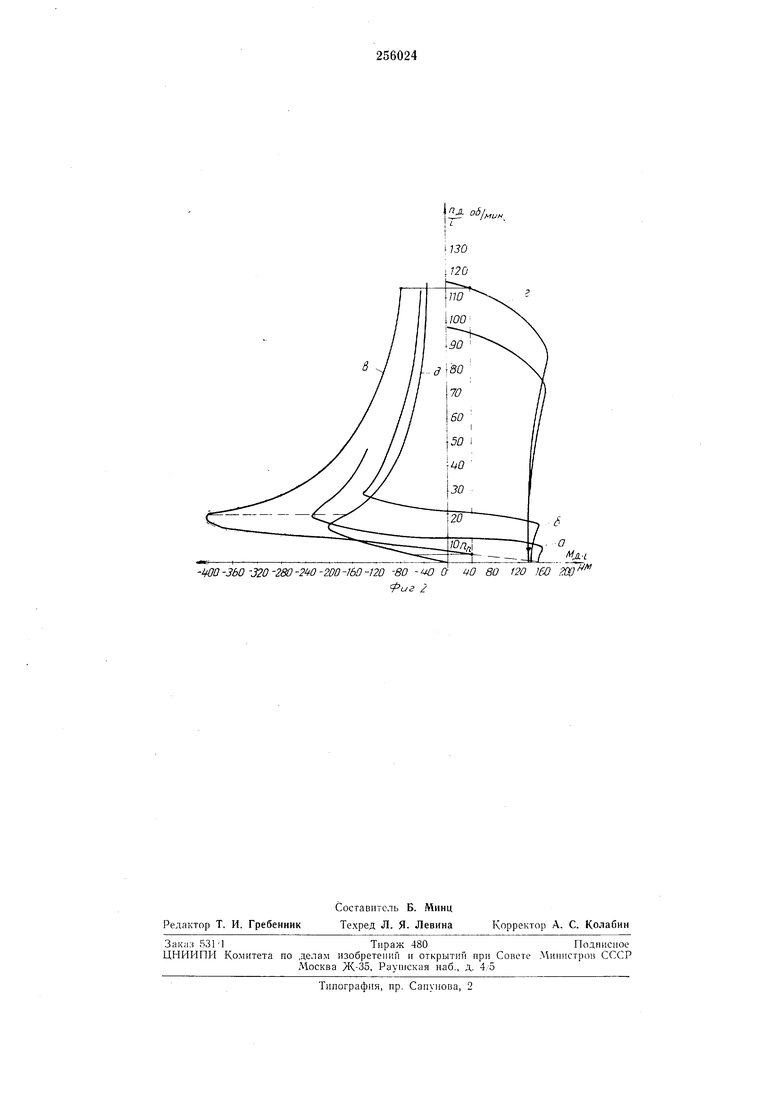
На фиг. 1 показана блок-схема нредлагаемого электроиривода; на фиг. 2 - его механические характеристики.
Предлагаемый электропривод для крановых механиз.мов содержит асинхронный электродвигатель 1, станцию управления 2 с двумя контакторами 3 и 4, двухскоростной электродвигатель 5 со станцией управления 6, механические тор.моза 7 и 8, дифференциальный редуктор 9 и выходной вал 10.
При пуске электродвигатель 5 подключается к сети переменного тока обмоткой малой скоростп, а электродвигатель 1 подключается к источнику постоянного тока контактором
-/ станции управления 2. Механические тормоза 7 и 8 разо.мкнуты, поэтому скорость вращения выходного вала 10 редуктора 9 зависит от скорости вращения двигателя 5 и момента Д1 намического торможения, разв 1вае.ого электродвигателе 1.
Для выхода привода на рабочую скорость электродвигатель 5 переключается на обмотку большой скорости, а электродвигатель / с выдержкой времени отключается от источника постоянного тока контактором 4 н подключается к трехфазной сети контактором 3. В этом случае скорость вращения выходного вала 10 редуктора 9 зависит от скорости вращения электродвигателей / и 5.
После отработки движения с рабочей скоростью иривод переводится на ползучую скорость, для чего электродвигатель / отключается от сети трехфазного тока контактором 3 и подключается к источнику постоянного
тока контактором 4, а двигатель 5 с выдержкой времени переключается на обмотку малой скорости. Для остановки привода электродвигатель 5 отключается станцией 6 от сети переменного тока, и с выдержкой времеа электродвигатель У отключается от источника постоянного тока.
На фиг. 2 показаны механические характеристики устройства: кривая а - характеристика двигателя 5 при включении обмотки малой скорости, кривая б - то же, при включении обмотки большой скорости, кривая в- естественная .ч арактеристика электродвигателя /, кривая г - суммарная естественная характеристика двигателей / и 5, кривая д - характеристика электродвигателя 1 при динамическом торможении двух двигателей (ползучая скорость).
При правильно выбранных параметрах динамического торможения и выдержек времени переход на ползучую скорость будет плавным.
При отношении передаточных чисел дифференциального редуктора 1 :6 и числа полюсов 1:4 диапазон регулирования привода будет 1 : 72.
Вместо односкоростиого асинхронного двигателя с короткозамкнутым ротором может
применяться также асинхронный двигатель с фазным ротором, а вместо двухскоростного двигателя - многоскоростной. Привод может быть применен на механизмах кранов, используемых там, где необходим точный останов (напри.мер, краны-штабелеры).
Предмет 11 3 о б р е т е н I я
Способ управления электроприводом, например, крановых механизмов с двумя асинхронными электродвигателями, валы которых имеют механический тормоз и соединены с входными валами дифференциального редуктора, причем одии из двигателей выполнен многоскоростным и может реверсироваться, а другой - односкоростиым и управляться со стороны статора (ротора), отличающийся тем, что, с целью повышения точности остановки, плавности пуска и перехода с рабочей скорости на «ползучую, обмотку статора односкоростного двигателя подключают к источнику ностоянного тока, в двухскоростной двигатель переключают на обмотку малой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ДЛЯ РОТОРНОГО СТОЛА БУРОВОГО СТАНКА | 1967 |
|
SU196685A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Электропривод механизма подъема башенного крана с параметрическим управлением | 2017 |
|
RU2666494C1 |
| Электропривод для управления плавучим краном | 1978 |
|
SU855907A1 |
| Электропривод кранового механизма подъема | 1979 |
|
SU773888A1 |
| Асинхронный электропривод | 1989 |
|
SU1663727A1 |
| Многофазная обмотка ротора двухскоростного асинхронного двигателя (ее варианты) | 1982 |
|
SU1101979A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВУХОБМОТОЧНЫМ МНОГОСКОРОСТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256058A1 |
| Электропривод переменного тока | 1986 |
|
SU1431025A1 |
игЛ
-Wa-3bO-320-280-2W-2DO- 60- 20 -80 -ио О 0 80 120 Ш
риг 2
