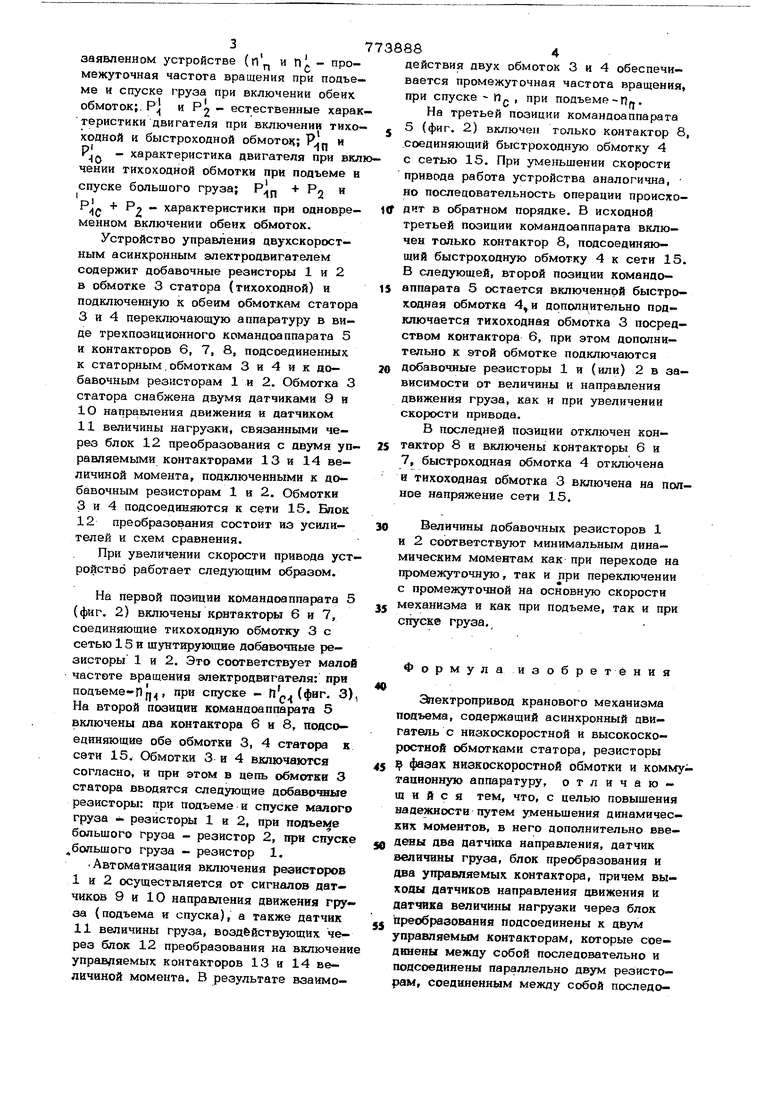
Изобретение относится к электротехнике, а. именно к электроприводам кранового меканизма подъема с авукскорост ным асинхронным электродвигателем. Наиболее близким по технической сущности и достигаемому результату является устройство, содержащее асинхронный двигатель с низкоскоростной и высокоскоростной обмотками статора, резисторы в фазах низкоскоростной об мотки и коммутационную аппаратуру 1 Недостаток устройства - резкое падение тормозного момента по мере увеличения скорости спуска, что ограничивает применение известного устройства и приводит к снижению надежности кранового механизма подъема в случае его эксплуатации. Цель изобретения - повышение надежности кранового механизма путем уменьшец я динамических моментов. Указанная цель достигается тем, что в электропривод кранового механизма подъема введены два датчика направления, датчик величины груза, блок преобразования и два управляемых контактора, причем выходы датчиков направления движения и датчика величины нагрузки через блок преобразования подсоединены к двум управляемым конта1 торам, которые соединены между собой последовательно и подсоединены параллельно двум резисторам соединенным между собой последовательно, причем общая точка этих резисторов соединена с общей точкой управляемых контакторов, а переключающая аппаратура выполнена в виде трехпоэиционного командоаппарата и трех контакторов, один из которых предназначен для шунтирования резисторов, а два остальных - для подключения обмоток двигателя к сети. На фиг. 1 изображена схема электропривода в виде однолинейной схемы; на фиг. 2 - диаграммы переключения обмоток статора; на фиг, 3 - механические характеристики электродвигателя при переключении полюсов обмоток статора в заявленном устройстве (п и ni - промежуточная частота вращения при подъеме и спуске груза при включении обеих обмоток;. Р и Ро - естественные харак теристики двигателя при включении тихоходной и быстроходной обмоток; РАП И Р... - характеристика двигателя при вкл чении тихоходной обмотки при подъеме в спуске большого груза; + Pj и PL + Р- - характеристики при одновременном включении обеих обмоток. Устройство управления двухскоростным асинхронным электродвигателем содержит добавочные резисторы 1 и 2 в обмотке 3 статора (тихоходной) и подключенную к обеим обмоткам статора 3 и 4 переключающую аппаратуру в виде трехпозиционного командоаппарата 5 и контакторов 6, 7, 8, подсоединенных к статорным.обмоткам 3 и 4 и к добавочным резисторам 1 и 2. Обмотка 3 статора снабжена двумя датчиками 9 и 10направления движения и датчиком 11величины нагрузки, связанными через блок 12 преобразования с двумя управляемыми контакторами 13 и 14 величиной момента, подключенными к добавочным резисторам 1 и 2. Обмотки 3 и 4 подсоедннягются к сети 15. Блок 12преобразования состоит из усилителей и схем сравнения. При увеличении скорости привода уст ройство работает следующим образом. На первой позиции командоаппарата 5 (фиг. 2) включены крнтакторы 6 и 7, соединяющие тихоходную обмотку 3 с сетью 15 и шунтирующие добавочные резисторы 1 и 2. Это соответствует малой частоте вращения электродвигателя: при поцъеме-Пп при спуске - Пр (фнг. 3) На второй позиции командоаппарата 5 включены два контактора б и 8, подсоединяющие обе обмотки 3, 4 статора к сети 15. Обмотки 3 и 4 включаются согласно, и при этом в цепь обмоткв 3 статора вводятся следующие добавочные резисторы: при подъеме и спуске малого груза - резисторы 1 и 2, при подъеме большого груоа - резистор 2, при спуск большого груза - резистор 1. Автоматизация включения резисторов Iи 2 осуществляется от сигналов датчиков 9 и 10 направления движения гру за (подъема и спуска), а также датчик IIвеличины груза, воздействующих через блок 12 преобразования на включен управляемых контакторов 13 и 14 величиной момента. В результате взаимо88действия двух обмоток 3 и 4 обеспечивается промежуточная частота вращения, при спуске - П , при подъеме-п,. На третьей позиции командоаппарата 5 (фиг. 2) включен только контактор 8, соединяющий быстроходную обмотку 4 с сетью 15, При уменьшении скорости привода работа устройства аналогична, но послецовательность операции происходит в обратном порядке. В исходной третьей позиции командоаппарата включен только контактор 8, подсоединяющий быстроходную обмотку 4 к сети 15. В следующей, второй позиции командо- аппарата 5 остается включенной быстроходная обмотка 4, и дополнительно подключается тихоходная обмотка 3 посредством контактора 6, при этом дополнительно к этой обмотке подключаются добавочные резисторы 1 и (или) 2 в зависимости от величины и направления движения груза, как и при увеличении скорюсти привода. В последней позиции отключен контактор 8 и включены контакторы 6 и 7, быстроходная обмотка 4 отключена в тихоходная обмотка 3 включена на полное напряжение сети 15. Величины добавочных резисторов 1 и 2 соответствуют минимальным динамическим моментам как при переходе на промежуточную, так и при переключении с промежуточной на основную скорости механизма и как при подъеме, так и при спуске груза. Формулаизобретёння Электропривод кранового механизма подъема, содержащий асинхронный двигатель с низкоскоростной и высокоскоростной обмотками статора, резисторы ) фазах низкоскоростной обмотки и коммутационную аппаратуру, отличающийся тем, что, с целью повышения надежности путем уменьшения динамических моментов, в него дополнительно введевы два датчика направления, датчик величины груза, блок преобразования и два управляемых контактора, причем выходы датчиков направления движения и датчика величины нагрузки через блок преобразования подсоединены к двум управляемым контакторам, которые соединены между собой последовательно и подсоединены параллельно двум резисторам, соединенным между собой последовательиО| причем общая точка этих резисторов соединена с обшей точкой управляемых контакторов, а, переключающая аппаратура выполнена в вида трехпозиционного командоаппарата и трех контакторов, один из которых предназначен для шунтирования резисторов, а два осталь-
ных - для подключения обмоток двигателя к сети.
Источники информации, принятые во внимание при экспертизе
1, Кранов(еталлургические электродвигатели. Под ред. А. А. Рабинович. М., Энергия. 1967, с. 186-190.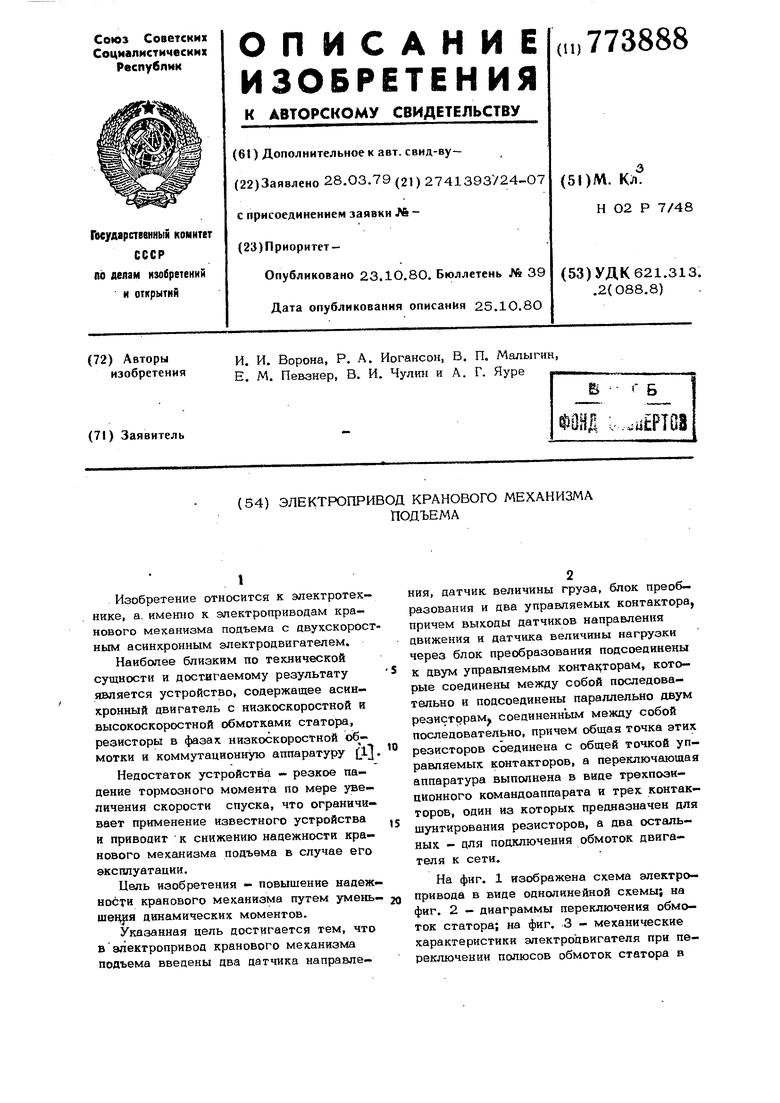
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Электропривод механизма подъема башенного крана с параметрическим управлением | 2017 |
|
RU2666494C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Электропривод | 1974 |
|
SU720647A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Электропривод | 1980 |
|
SU871290A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |