Известен способ управления асинхронным двухобмоточным многоскоростным электродвигателем, об.чотки которого включают последовательно при переводе с высшей скорости на низшую. Для устранения провала тормозного момента при скорости, близкой к высшей синхронной, параллельно быстроходной об лотке включают дополнительное трехфазное сопротивление.
Для Осуществления предлагаемого способа управления применяется более иростая система управления и исключается добавочное сопротивление без угрозы провала тормозного момента вблизи высшей синхронной скорости.
Это достигается тем, что обмотку высшей скорости отключают от сети и подключают с обратным чередованием фаз к концам тихоходной обмотки, начала которой включают в сеть. Таким образом, двигатель переводится в встречного вращения, при котором магнитные поля двух обмоток будут враш,аться встречно. На фиг. 1 показан один из вариантов устройства для осуществления предложенного способа управления; на фиг. 2 - механические характеристики двигателя.
гателя на высшей скорости обмотка / включается контактором 3, а контакторы 4 н 5 отключены. Для перевода двигателя на низшую скорость контактор 3 отключается, а замыканием контактора 5 создается цепь последовательного соедииения обмоток / и 2, причем в обмотке / чередование фаз меняется ца обратное.
Реле 6 контролирует в процессе торможения двигателя изменение тока в последовательной цепи двух обмоток. При достиженни минимального значения тока-на уровне нижней синхронной скорости реле 6 отключает контактор 5 и включает контактор 4. Это
переводит двигатель в режим работы на малой скорости, обусловленный обмоткой 2.
В описанном устройстве тихоходная обмотка 2 имеет схему открытой звезды, а обмотка / может иметь любую схему, в том числе и
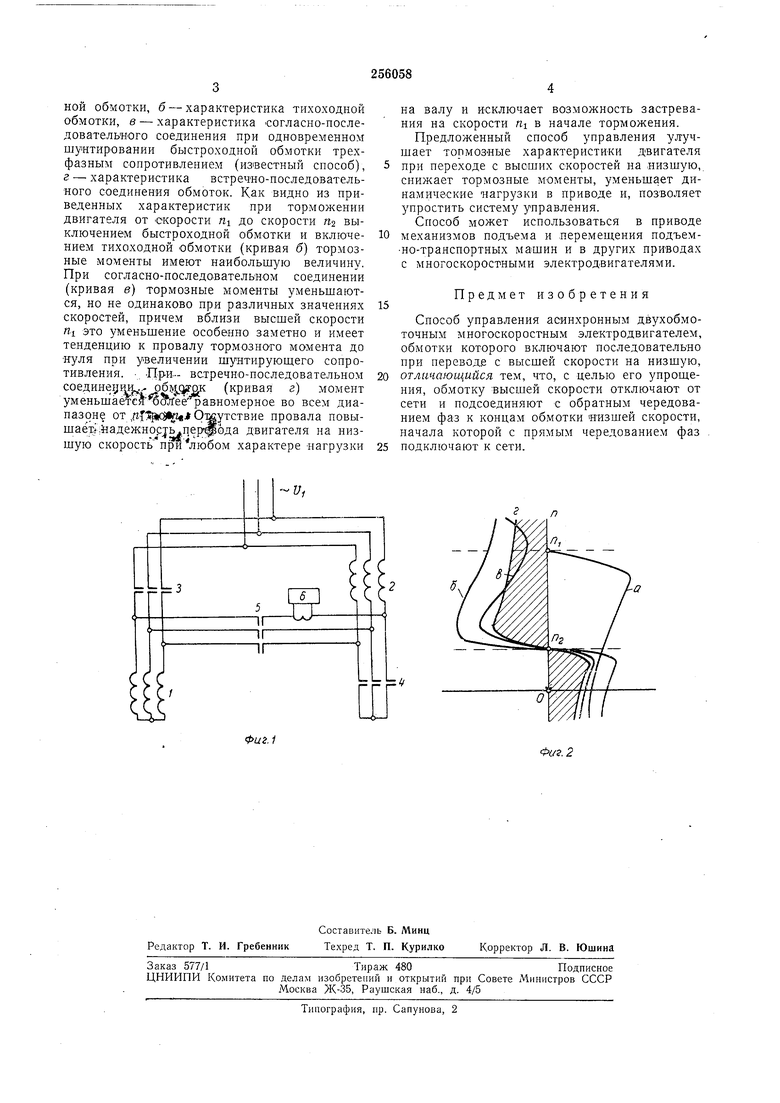
полюсопереключаемую. Это позволяет использовать предложенный способ управления при переводе двигателя с любой высшей или промежуточной скорости на самую низшую, обеспечпвая у.меньшение тормозных моментов и
снижение динамических нагрузок в приводе. Па фиг. 2 показаны механические характеристики двухскоростного двигателя, управляемого предложенным способо.м, при переводе с высшей скорости п на низшую сконой обмотки, б - характеристика тихоходной обмотки, в - характеристика согласно-последовательного соединения при одновременном шунтировании быстроходной обмотки трехфазным сопротивлением (известный способ), г - характеристика встречно-последовательного соединения обмоток. Как видно из приведенных характеристик при торможении двигателя от скорости ni до скорости п выключением быстроходной обмотки и включением тихоходной обмотки (кривая б) тормозные моменты имеют наибольшую величину. При согласно-последовательном соединении (кривая в) тормозные моменты уменьшаются, но не одинаково при различных значениях скоростей, причем вблизи высшей скорости «1 это уменьшение особенно заметно и имеет тенденцию к провалу тормозного момента до Нуля при увеличении шунтирующего сопротивления. -Пр-и.- встречно-последовательном соединеущ..,.- (кривая г) момент уменьшает€я оотеёравномерное во всем диапазоне от Д11 р|фи«л Отеутствие провала повышает :«адежнос ь.п, двигателя на низшую скорость при любом характере нагрузки
на валу и и-сключает возможность застревания на скорости «1 в начале торможения.
П.редлол енный способ управления улучшает тормозные характеристики двигателя при переходе с высших скоростей на низшую, снижает тормозные моменты, уменьшает динамические нагрузки в приводе и, позволяет упростить систему управления.
Способ может использоваться в приводе механизмов подъема и перемешения подъемно-транспортных машин и в других приводах с многоскоростными электродвигателями.
Предмет изобретения
Способ управления асинхронным двухобмоточным многоскоростным электродвигателем, обмотки которого включают последовательно при переводе с высшей скорости на низшую, отличающийся тем, что, с целью его упрошения, обмотку высшей скорости отключают от сети и подсоединяют с обратным чередованием фаз к концам обмотки низшей скорости, начала которой с прямым чередованием фаз подключают к сети.
Фиг.1
Ф(/г.2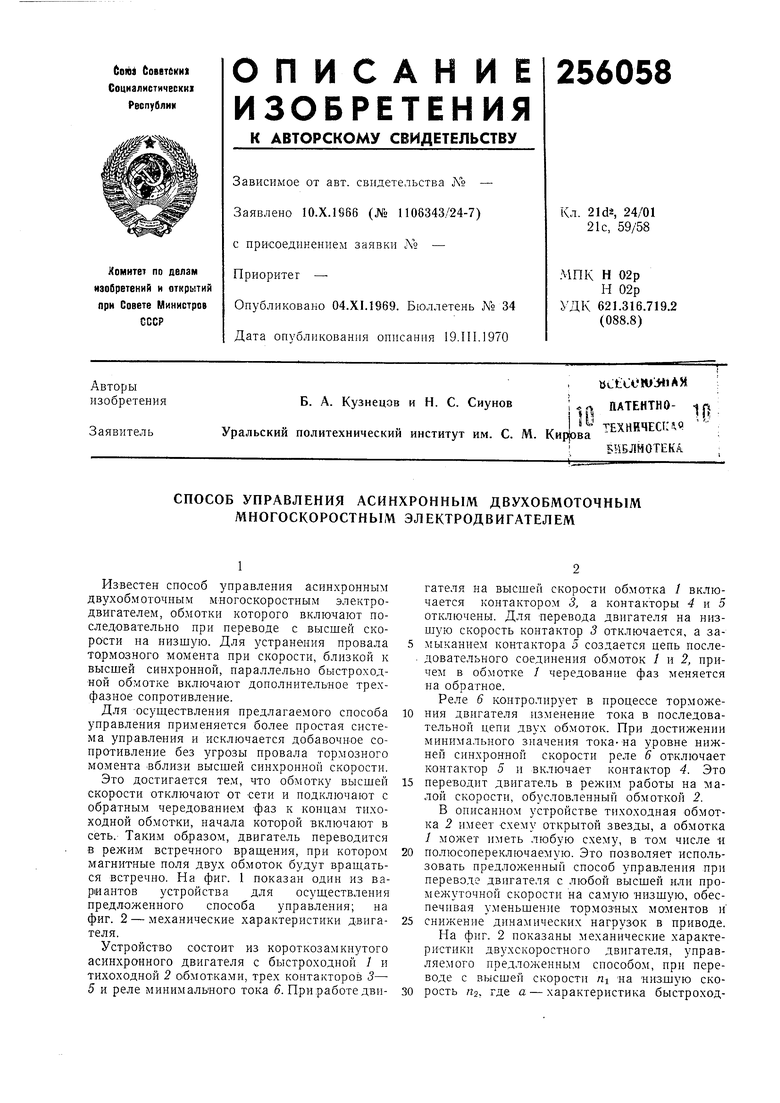
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухскоростной асинхронный двигатель | 1980 |
|
SU920970A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Электропривод кранового механизма подъема | 1979 |
|
SU773888A1 |
| Электропривод | 1979 |
|
SU801214A1 |
| СПОСОБ ТОРМОЖЕНИЯ ДВУХДВИГАТЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2011 |
|
RU2479916C1 |
| Способ торможения асинхронного электродвигателя | 1984 |
|
SU1226598A1 |
| БИБЛИОТЕКА I | 1971 |
|
SU322839A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| Способ управления асинхронным электро-дВигАТЕлЕМ C фАзНыМ POTOPOM | 1979 |
|
SU847481A1 |
| Способ контроллерного управления электрическим приводом лебедки | 1945 |
|
SU68403A1 |
