Известные способы улучшения динамических характеристик, например, электрических регул1ирующих устройств на одном усилителе и jRC-элементах имеют либо в определенном диапазоне независимые настройки и ограниченную величину отношения «постоянной времени дифференцирования (7„) ж постоянной времени и интегрирования (Г„ ), либо при взаимном влиянии настроек параметров ПИД-закона неограниченный сверху предел этого отношения; причем величина отношеГ. кия К ограничена -снизу значением
а
..
Предлагаемый способ .позволяет добиться независимости настроек всех параметров ПИД-закона регулирО:вания (пропорциональной, интегральной и дифференциальной частей) , получить любую требуемую величину отношения постоянной времени дифференцирования к постоянной времени интегрирования, реа.тизовать при малых номиналах С-. элементов динамической связи большие значения постоянных времени интегрирования и дифференцирования. Этот способ отличается тем, что входной сигнал, |подводимый ко входу регулятора, в определенных регулируемых пропорциях (заданных долях входного сигнала, или усиленных величинах его, или их комбинациях) одновременно вводят как во
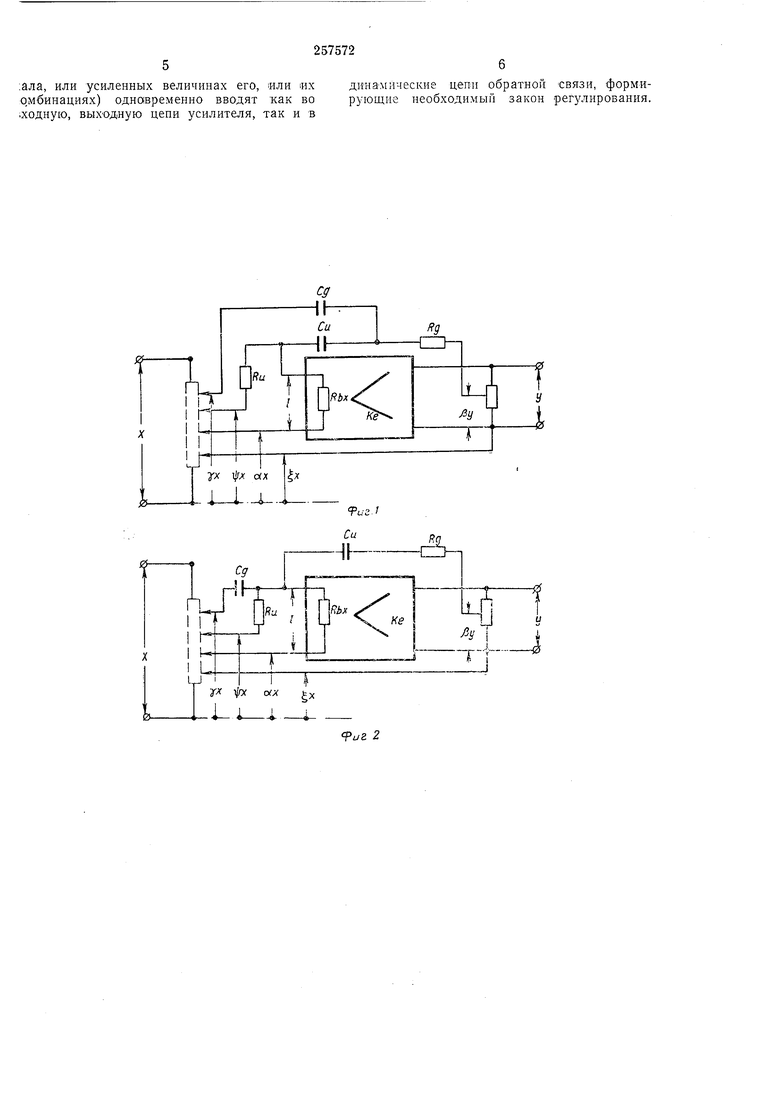
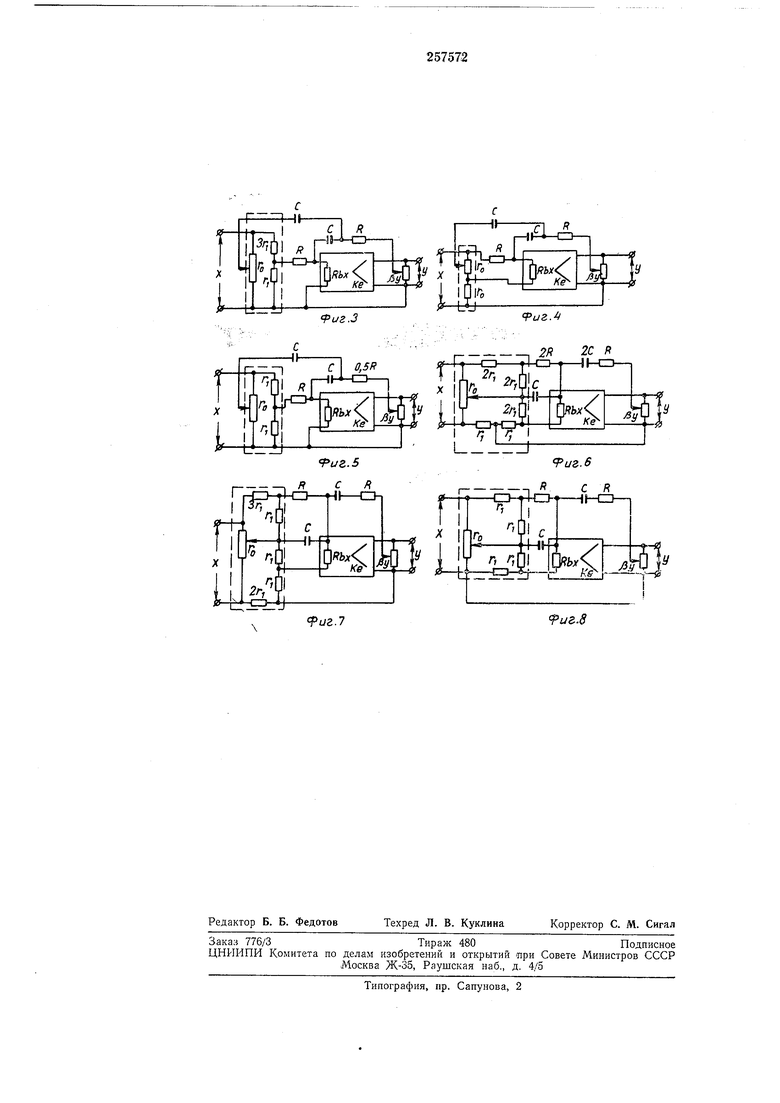
входную, выходную усилителя, так и s динамические цепи обратной связи, формируюшие необходимый закон регулирования. Обобщенные структурные схемы электричеСКОРО ПИД-регулятора по предлагаемому способу представлены на фиг. 1-8 со следующем м обозначениями:
X, Y -соответственно входной и выходной сигналы регулятора; пунктиром условно TIOказано устройство, обеспечивающее регулировку и задание частей (фА, уХ, аХ, Х) входного сигнала; (:Х, уХ, аХ, IX) -соогветствующие части входного сигнала, подаваемые непосредственно в интегрирующую и
дифференцирующую У С-цепочки, вход и выход усилителя; Л% -коэффициент усиления разомкнутого по цепи обратной связи усилителя; е- величина сигнала на входе усилителя; RI.J. - входное сопротивление усилителя по постоянному току; , Rg, С, Cg -
сопротивления и конденсаторы динамической связи; рУ - часть выходного сигнала, подаваемая в обратную связь. Если принять: и Rf:., то обобщенная яередаточная функция ПИД-регулятора запишется:
S) -Kp{l+T S
TuS
(S)
где Кр - динамический коэффициент усиления (зона иропорциональности);
Tg -соответственно постоянные времени дифференцирования и интегрирования;
К - -коэффициент, характеризующий
и
величину отношения постоянной времени дифференцирования к постоянной времени интетрирования. Для -структуры фиг. 1 справедливо:
т С4- - - (+-)+( -
р L и /J
(-)
)fl + ) +(-«)
KU
Си
+ (е -)
(ф-а) 1 +
iRu
с.
и -
(i-a)
(т-«)(Ф-)
RcrCg
-у. А ri(t-,,(i+|t)+(-,)
L /J
Для структуры фит. 2 справедливо:
/.-у Г(-«)+(|-«)+-§(т-а);
()
А
(-«)+4-())l
(5-) + (i-)-l--S(T-«)
с„
««
(i-a)
Л,С.(у-с.)(-:0
(;-,) + |-(-a)()l
LА„СцJ
В качестве конкретното примера реализации предлагаемого способа могут быть указаны варианты п и g - регулятора с отношеТнием от нуля до единицы, в которых в
„ .
качестве, устройства, обеспечивающего регулировку и задание частей , уХ, аХ...) и т. д. входного сигнала в определенных пропорциях, применен обычный потенциометрический делитель. Все данные сведены в таблицу
Предлагаемый способ может -найти широкое применение при разработке современных регуляторов для различных отраслей промышленности.
Предмет изобретения
Способ улучшения динамических характеристик, например, электрических регулирующих устройств с пропорционально-интегральным И пропорционально-интегрально-дифференциальным законами регулирования, основанный на использовании операционного усилителя и динамических обратных связей, отличающийся тем, что, с целью получения независимости и расширения диапазона настрорк всех параметров .пропорциональноинтегрального и пропорц-ионально-интегрально-дифференциального законов регулирования, входной сигнал, подводимый ко входу регулятора, в определенных регулируемкх пропорциях {заданных долях входного сиг.
Таблица
;ала, или усиленных величинах его, или их омбинациях) одновременно вводят как во .ходную, выходную цепи усилителя, так и в
динамические цепи обратной связи, формирующие необходимый закон регулирования.

9иг.
