Изобретение относится к гальванотехнике и может быть использовано, например, в цветной и черной металлургии при автоматизации процесса электро- литического травления. Цель изобретения - повышение точности стабилизации диаметра микропроволоки,
. На фиг„ 1 изображена -схема пред- лагаемого устройства; на фиг. 2 - структурная схема блока пропорционально-интегрально-дифференциальногорегулирования.
Устройство содержит ванну 1 трав- ления с электродами, питающий трансформатор 2, механизм 3 перемотки, преобразователь 4 отклонения выходного диаметра микропроволоки от заданного, блок 5 сравнения, интегратор 6, блок 7 пропорционально-интегрально-дис г- ференциального регулирования, блок 8 суммирования, усилитель 9,, датчик 10 тока, элемент 11 масштабирования, пр ичем устройство 12 масштабирующего суммирования выполнено в виде элемента 11 масштабирования и блока 8 суммирования.
Устройство работает следующим образом.
Микропроволоку протягивают через ванну 1 травления в электрическом
поле между электродами, где п 5оисхо- дит изменение ее диаметра за счет анодного растворения поверхностных слоев металла. Движение проволоки обеспечивается механизмом 3 перемот КИв Относительное отклонение диаметр микропроволоки от заданного на выход ванны 1 травления измеряется емкостным преобразователем 4, сигнал с которого поступает на вход инерционног звена, выполненного на элементе 5 сравнения и интеграторе 6 с настраиваемым временем интегрирования. Интегратор работает в режиме слежения за сигналом, поступающим с преобразователя 4, с одновременным его усреднением. Усредненный сигнал с интегратора 6 поступает на вход блока 7 пропорционально-игтегрально-дифференциального регулирования, который в зависимости от величины и знака входного сигнала формирует сигнал, управляющий усилителем 9,, который регулирует ток в цепи электродов 1 травления. Принцип действия усилител основан на усилении и преобразовании
сигнала постоянного тока, поступающего с блока пропорционально-интегрально-дифференциального регулирования, в выходное переменное напряжение, используемое для электропитания электродов ванны. Усилитель охвачен отрицательной обратной связью по току, протекающему в цепи электродов ванны.
Коэффициент обратной связи настраивается элементом 11-масштабирования, выполненным в виде обычного делителя напряжения. Отрицательная обратная связь стабилизирует ток травления при перепадах напряжения в сети переменного тока и колебаниях электропроводности электролита в ванне 1 травления. Благодаря действию отрицательной обратной связи по току выходной сигнал усилителя 9 зависит только от уровня сигнала, поступающего с блока 7, и не зависит от перепада
напряжения в сети переменного тока и колебаний электропроводности электролита в- ванне 1 . Любое изменение напряжения в сети или электропроводности электролита в ванне вызывает изменение тока .в цепи электродов., а следовательно, и сигнала отрицательной обратной связи, которая воздействует на работу усилителя таким образом, что его выходной сигнал при этом, о,стается неизменным. Возмущение, вносимое в процессе перемотки увеличением скорости движения.проволоки из-за увеличения радиуса ее намотки на приемную бобину, имеет слабо выраженный характер, так как является монотонным и поэтому легко локализуется контуром стабилизации диаметра.
Наличие запаздывания по каналу передачи сигнала отклонения диаметра, вносимое инерционным звеном, в определенной степени компенсируется дифференциальной составляющей блока 7. Б элементе 5 сравнения сравнива- .ются сигнал отклонения диаметра микропроволоки от заданного, поступающий с преобразователя 4, и этот же сигнал,
но проинтегрированный интегратором 6 по некоторому периоду времени для по- хо чения средней величины. В зависимости от знака сигнала на выходе элемента 5 сравнения, интегратор 6 осуществляет интегрирование этого сигнала в сторону его увеличения или уменьшения. Когда в момент времени t: t, выходной сигнал интегратора сравняется.в элементе сравнения е
входным сигналом, поступающим с преобразователя Д, интегратор переходит в режим хранения и его выходной сигнал соответствует средней величине значения контролируемого параметра (отклонения диаметра микро- проволоки от заданного), которое оно имеет при t t| .
Хранение информации на выходе интегратора основано на его свойстве запоминания информации в момент време- I ни когда его вход отключен или входной . сигнал равен нулю. Таким образом, ине{)ционное звено, состоящее из элемента 5 сравнения и интегратора 6, позволяет получить на своем выходе усредненный сигнал отклонений диаметра микропроволоки от заданного и устранить колебательность сигнала в
измерительном канале блока 7, что делает работу последнего устойчивой, не вызывает раскачки его выходного сигнала, а следовательно, позволяет улучшить качество регулирования и повысить точность стабилизации диаметра микропроволоки на вьгходе из ванны травления.
В предлагаемом устройстве инерционное звено, состоящее из элемента 5 сравнения и интегратора 6, позволяет при соответствующем подборе времени интегрирования в интеграторе подавить пульсации сигнала в измерительном ка- нале блока 7,в то время как органами настройки последнего (коэффициент пропорциональности, время интегрирования, время дифференцирования) процесс настраивается на оптимальное качество регулирования при минимальных величинах перерегулирования и статической ошибки и максимальном коэффициенте затухания,
Следовательно, инерционное звено, состоящее из элемента 5 сравнения и интегратора 6, обеспечивает устойчивую работу блока 7 и устранение на его входе и выходе колебательности сигнала, обусловленного неравномерностью исходного диаметра микропроволоки, что улучшает качество регулирования и точность стабилизации диаметра микропроволоки на выходе из ванны травления.
Сигнал Y (фиг, 2) отклонения регулируемой величины от заданного значения подается на инвертирующий вход операционных усилителей А2 и A3. ифференциальная составляющая з.акона
S «
8409 - ,
регулирования формируется операцион- ным усилителем А1, во входной цепи которого включен конденсатор потенциометр KQ.
Операционный -усилитель A3 является сумматором пропорциональной(П)и дифференциальной (Д )составляющих закона регулирования. В цепи общей отрйца- 1Q тельной обратной связи последовательно соединенных усилителей А1 и A3
включен конденсатор С для подавления помех выходного сигнала. Постоянная времени этого звена устанавливается
потенциометром К.
Интегрирующее звено выполнено на операционном усилителе А2, в Цепи отрицательной обратной связи которого включен конденсатор С„. В режиме автоматического управления интегратор формирует интегральную И составляющую закона регулирования по входному сигналу YC.
Выходы усилителей А2 и A3 подключены к операционному усилителю А5. Коэффициент передачи усилителя А5 регулируется, его величина определяет коэффициент пропорциональности Кр регулирующего блока. Таким образом,
выходной сигнал операционного усилителя А5 является суммой П, И, Д составляющих, причем параметры динамической настройки регулирующего блока независимы.
В цепи отрицательной обратной связи последовательно соединенных операционных усилителей А2 и А5 включен конденсатор Ср. Образованное таким образом, интегрирующее звено
используется для осуществления плавного переключения режима управления. Бпок регулирования переводится в режим ручного, дистанционного управления входным сигналом „.
45
50
55
В режиме ручного управления при Р„ 1 инвертирующий вход операционного усилителя А2 интегратора соединен с общей шиной и управление интегратором осуществляется по неинвертирующему входу сигналами Pg и Р. В зависимости какой из них подан происходит изменение выходного сигнала блока регулирования в сторону его увеличения или уменьшения. При отсутствии управляющих сигналов Р5 и Р выходной сигнал блока регулирования удерживается на постоянном уровне компенсатором дрейфа (КД),
Ограничитель выходного сигнала регулятора выполнен на операционном усилителе Аб (фиг, 2), в цепи обратной связи которого включены два нуль- органа А7 и А8, При достижении выходным сигналом усилителя А6 верхнего (нижнего) установленного уровня ограничения Xg и (XK) срабатывает соответствующий нуль-орган,, на выходе которого появляется сигнал, компенси- рующий входной сигнал и поддерживающий на выходе усилителя А6 сигнал, равный соответствующему уровню ограничения. Аналогичное ограничивающее
воздействие оказывает выходной сигнал )5 вателем отклонения диаметра микропрооперационного усилителя А4 на интегратор.
Экономический эффект от внедрения устройства достигается за счет сокращения отходов и брака по неравномер- 20 ности микропроволоки по диаметру.
Формула изобретения
Устройство управления процессом 25 электрохимического травления микропроволоки, содержащее ванну травления с электродами, питающий трансформатор, датчик тока, механизм перемотки, пре
образователь отклонения выходного диаметра от заданного, интегратор, усилитель включенный в цепь первичной обмотки питающего трансформатора, устройство масштабирующего суммирования, выполненного в виде элемента масштабирования и блока суммирования, отличающееся тем, что, С целью повышения точности стабилизации диаметра микропроволоки, оно снабжено блоком пропорционально-интегрально- дифференциального регулирования, блоком сравнения, причем первый вход блока сравнения соединен с преобразоволоки от заданного, второй вход - с выходом интегратора и входом блока пропорционально-интегрально-дифференциального регулирования, а выход - с входом интегратора, выход блока пропорционально-и нтегрально-дифферен- циального регулирования подключен к первому входу блока суммирования, второй вход которого через элемент масштабирования связан с выходом датчика тока, включенного в цепь вторичной обмотки питающего трансформатора и электродов ванны травления, а выход подключен к входу усилителя,
YU
Rt..
А8
Ин


| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для электрохимического травления микропроволоки | 1981 |
|
SU956635A1 |
| Устройство автоматического регулированияпРОцЕССА элЕКТРОХиМичЕСКОгОТРАВлЕНия МиКРОпРОВОлОКи | 1978 |
|
SU836246A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Электрохирургический генератор | 2024 |
|
RU2834838C1 |
| Способ автоматического контроля и управления процессом электрохимического травления микропроволоки | 1977 |
|
SU663767A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
Изобретение может быть использовано в цветной и черной металлургии при автоматизации процессов электрохимического травления. Цель изобретения состоит в повышении точности стабилизации диаметра микропроволоки. Отклонение диаметра микропроволоки t т 9 от заданного измеряется на выходе из ванны 1 травления (ВТ) емкостным преобразователем 4, выходной сигнал которого сглаживается инерционным звеном, состоящим из элемента 5.сравнения (ЭС) и интегратора 6, на выходе которого формируется усредненный сигнал отклонения диаметра микропроволоки от заданного, поступающий на вход блока 7 пропорционально-интегрально-- дифференциального (ПИД) регулирования. В зависимости от величины и знака этого сигнала блок 7 регулирования формирует на своем выходе по ПИД закону сигнал, управляющий усилителем 9, который регулирует ток травления. Иовьпление точности стабилизации диаметра микропроволоки достигается введением в данное устройство .блока регулирования и блока сравнения. 2 ил. (Л со N9 ОО 4 Р СО az.f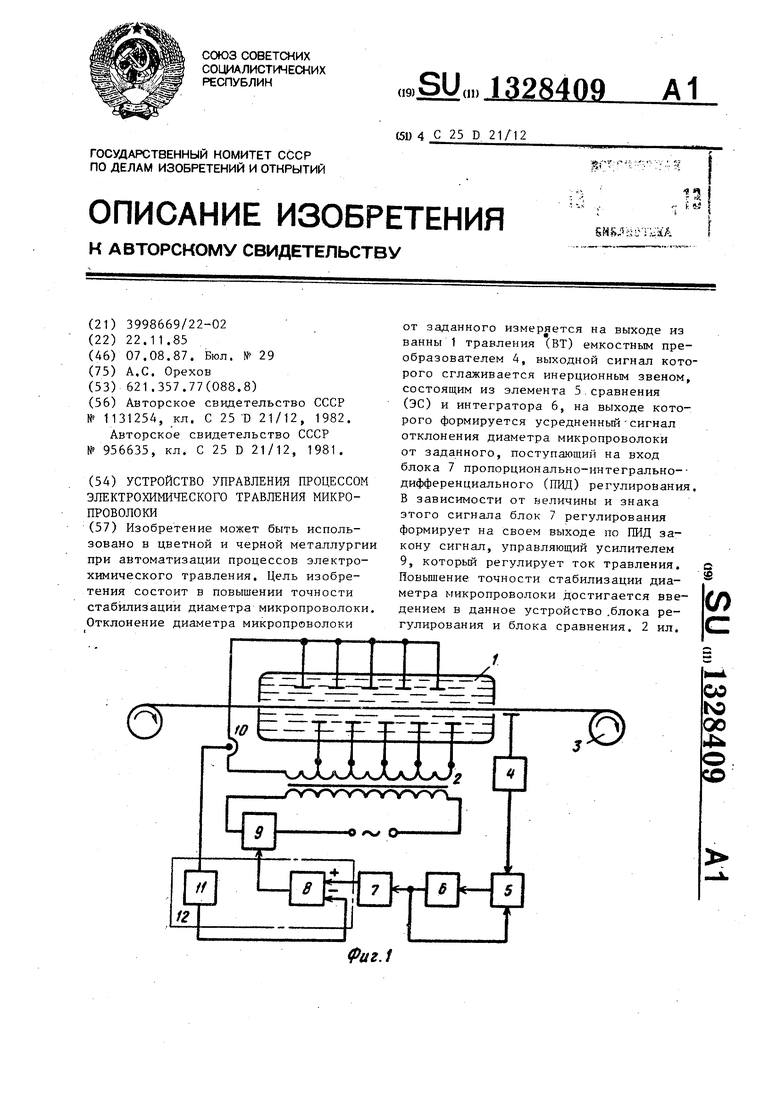
ВНИИЛИ Заказ 3455/30Тираж 612
Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
| Устройство для контроля процесса травления | 1982 |
|
SU1131254A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Установка для электрохимического травления микропроволоки | 1981 |
|
SU956635A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
