В известных конструкциях опор часть весовой нагрузки компенсируется дополнительным разгружающим погоном, опирающимся на дополнительную опору.
Известными конструкциями опор не компенсируются внетиние ветровые нагрузки, воздействующие на опору.
В предложенном устройстве чтот недостаток устранен тем. что опопа разгружаюп1его погона выполнена в виде ряда гидраплт1ческих домкратов с дросселями и управляющего их работой копирного диска с приводом управления, снабженньга датчиками скорости и направления ветпа. того, при использовании телескопа с антенной, имеющей горизонтальную ось вращения, привод управления копирного диска снабжен датчиком положения антенны.
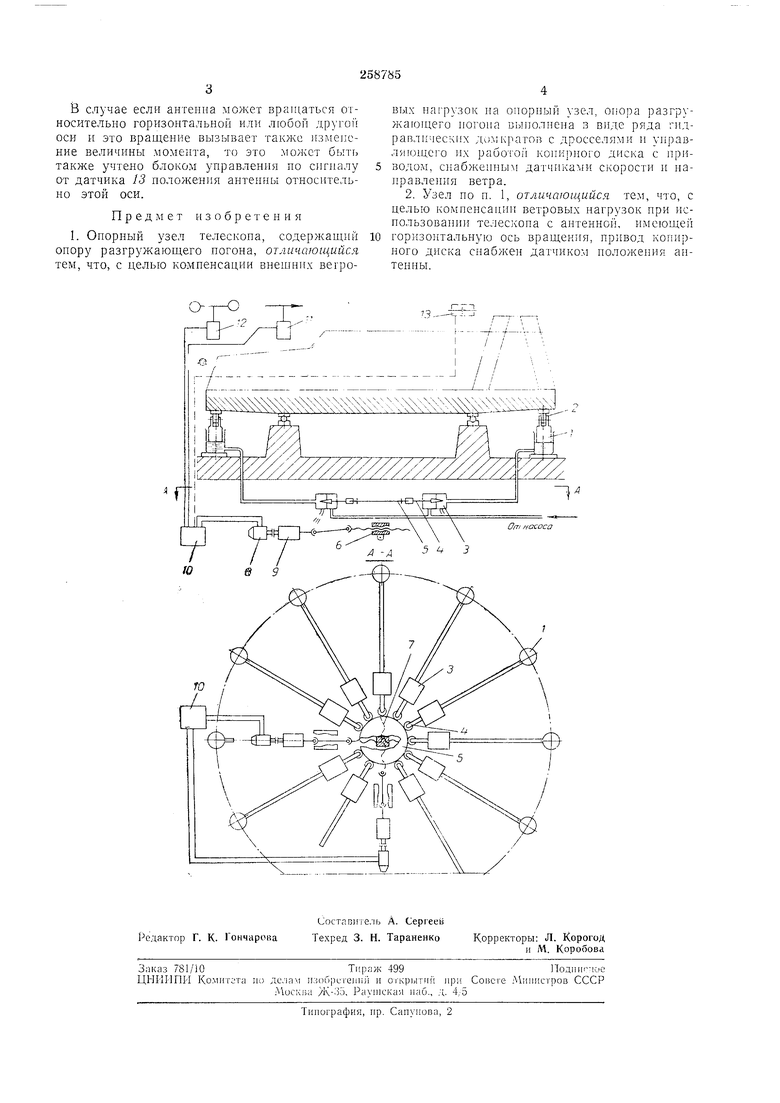
На чертеже показана конструкция опоры.
Опора содержит гидравлические домкраты /, расположенные по ОКРУЖНОСТИ и передающие усилие на поверхность вращающейся части через ролики 2 на подвижной части дод1крата. Давление жидкости в додткратах поддерживается на определенном уровне посредством дроссельных устройств ,9, имеюгцпх управляющие стержни 4, взаимодействующие с копирным диском 5. Диск может перемещаться в любом направлении путем суммирования перемещений двух гаек 6 по винтам 7, врашение КОТОРЫХ происходит от двигателей 5 через редуктор 9. Количество и направление оборотов двигателя задается от блока управления W в завис мости от сттгналов латчиков // и /2 направлении и скорости ветра.
Устройство ряботает следующим образом.
ПРИ отс тств и ветра да лснтте во всех домкратах одинаковое, и ОРИ снтшают с ОПОРНОГО узла лишь часть веса. При ветре, в зависшгости от его направления и скорости, блок управления Ю. получая необхо, сигналы от датчиков // и /2, вырабатывает необходи rыe данные на перелещенпе диска 5 и удерясанне его в устат овленном положении.
Пере деиенис диска протгсходит в направлении ветра на величин . cooтвeтcтвy oти Ю eiO силе. этом управляюитие стержни 4 перекрывают дpocceльн e отверстия, пoдни ая давлентте в домкратах с подветренной стопокы, и открывают дроссельные отвепстия, снижая давление в домкратах с наветренной стороны.
Величины перемещений управляющих стержней 4 и профиль дросселирующих игл согласуются так. то величина обратного момента примерно соответствует н направлена противоположно внетине п Вследствтте этого колебание велич1 н остаточных нагрузок на основной опорный Узел незначительно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРУСНАЯ ГОРИЗОНТАЛЬНАЯ ВЕТРОСИЛОВАЯ ТУРБИНА | 2015 |
|
RU2631587C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2782720C1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2680209C2 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2788013C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| ВЕТРОЭЛЕКТРОСТАНЦИЯ ВЫСОКОЙ МОЩНОСТИ | 2009 |
|
RU2430266C1 |
