1
Данное предложение относится к области автоматического регулирования.
Известны комбинированные следящие приводы, содержащие основной контур с элементом сравнения, первый контур самонастройки с дифференциатором, подключенным к входному зажиму, умножителем, интегратором и элементом сравнения, второй контур самонастройки с интегратором и умножителем, вход которого подключен к элементу сравнения основного контура, и блок реле. Недостатком известных устройств являются ограниченные динамические возможности.
Предложенное устройство отличается от известных тем, что в нем дополнительно установлены последовательно включенные между собой два дифференциатора, делительное устройство, устройство извлечения корня, второй блок реле, интегратор, умножитель и сумматор, подключенный ко входу основного контура, причем вход этого интегратора подключен к выходу элемента сравнения основного контура; вход первого дополнительно включенного дифференциатора подключен параллельными связями к дифференциатору первого контура самонастройки, первому блоку реле, делительному устройству, умножителю первого контура самонастройки и сумматору этого контура, подсоединенному к основному контуру; вход второго дополнительно установленного дифференциатора подключен ко второму блоку реле и входам дополнительно установленных умножителя н сумматора; выход второго донолнительно установленного дифференциатора подключен ко второму входу первого блока реле и интегратору второго контура самонастройки; выход устройства извлечения корня подсоединен к третьему входу первого блока реле, подключенного к интегратору первого контура самонастройки.
Это позволяет обеспечить минимизацию средиеквадратического значения ошибки при отработке скачкообразного сигнала, сигнала, изменяющегося с постоянной скоростью и ускорением, и синусоидального сигнала с различной частотой.
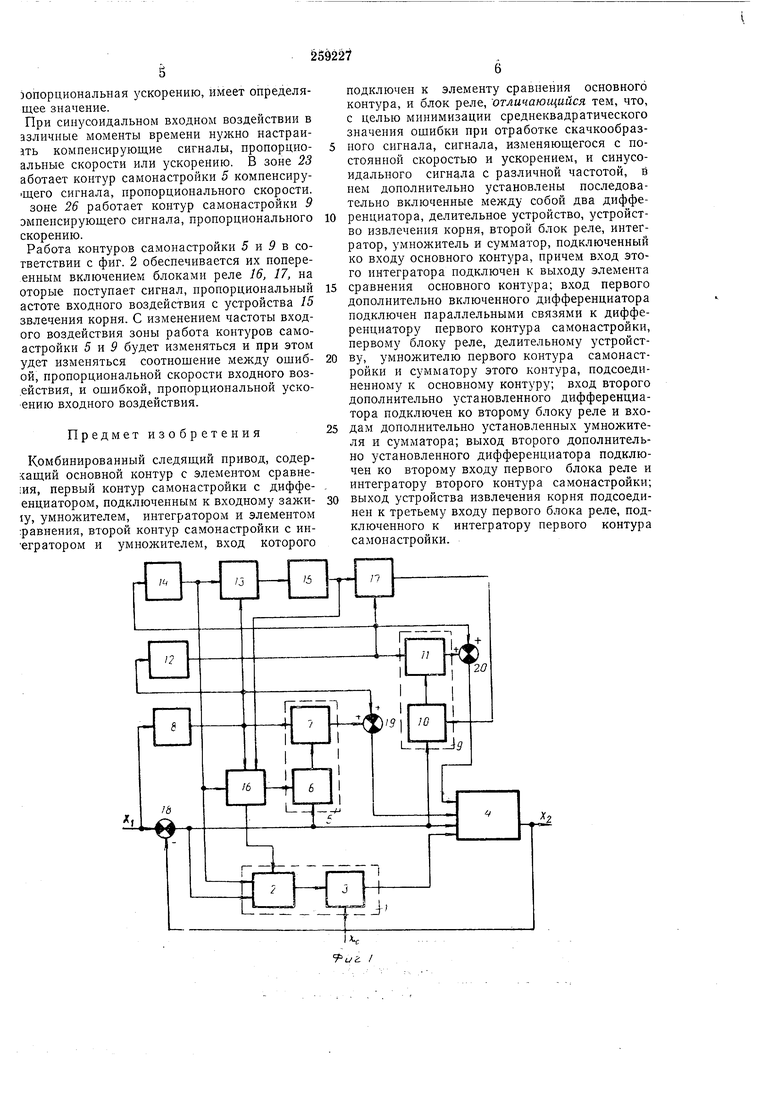
На фиг. 1 представлена структурная схема комбинированного следящего привода с контурами сал онастройки, минимизирующими
средиеквадратические значения составляющих
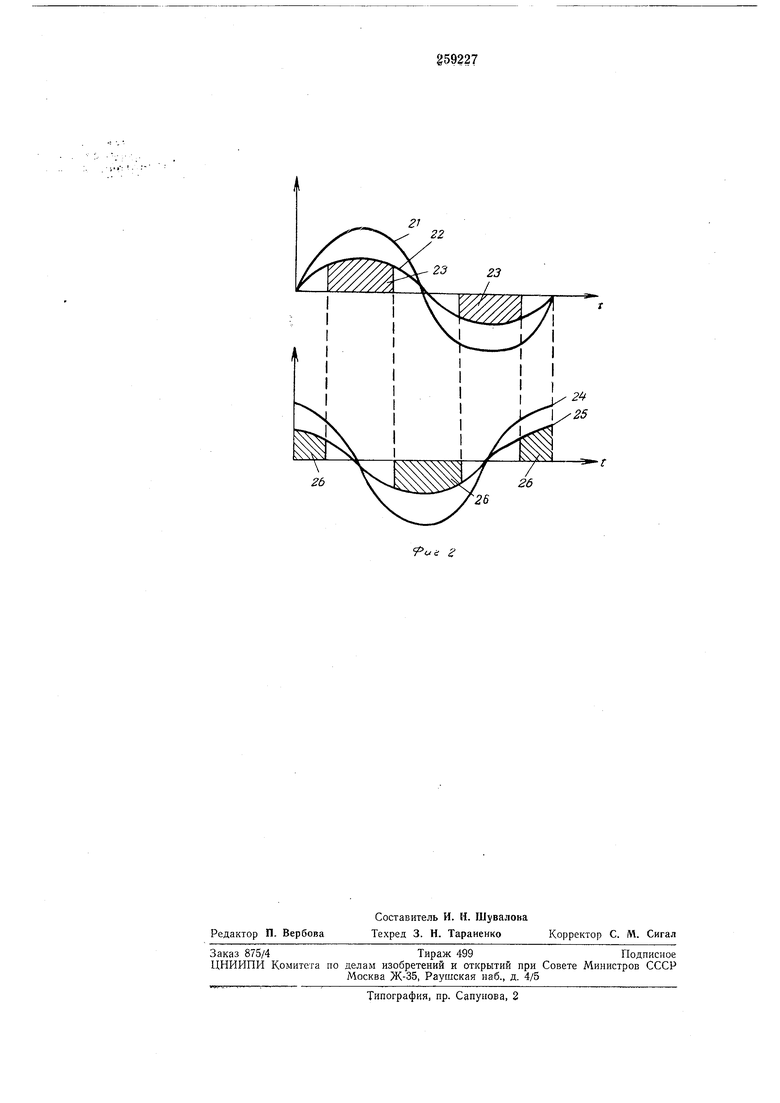
ощибки; на фиг. 2 - характер изменения ощибок при синусоидальном входном воздействии.
На фиг. 1 приняты следующие обозначения:
Ао - сигнал. кол1пенсирующ1и 1 статическую
ощибку; Xi - входная величина; Ло - выходная величина; X - ощибка системы.
toporo соединен с сигналом ошиоки, а выход - с м-.,.лжительным устройством 3, выполненным на нотенциометре, выход которого соединен с основным контуром системы 4. Контур самонастройки 5 комненсирующего сигнала, нропордионального первой производной от входного воздействия, содержит интегрирующее устройство 6, выполненное на асинхронном двухфазном двигателе, вход которого соединен с каналом ошибки, а выход - с множительным устройством 7, которое выполнено на потенциометре. Множительное устройство соединено с дифференцирующим устройством 8, связанным со входом системы. Выход устройства 7 соединен с основным контуром системы 4. Контур самонастройки 9 компепсирующего сигнала, пропорционального второй производной от входного воздействия, состоит из интегрирующего устройства 10, выполненного на асинхронном двухфазном двигателе, вход которого соединен с каналом ощибки, а выход - с множительным устройством 11, которое выполнено на потенциометре. Устройство // связано с дифференцирующим устройством 12, а последнее - с выходом дифференцирующего устройства S. Выход устройства // соединен с основным контуром системы 4.
Вход делительного устройства 13, выполненного на датчиках Холла, соединен с выходом устройства S и с выходом дифференцирующего устройства 14, которое связано с выходом устройства 12, а выход устройства 13 - с устройством 15 извлечения корня, выход которого соединен с блоками реле 16 и 17. Блок реле 16 соединен с устройствамл 2 и 5 и с выходом устройств 8 и 14. Блок реле 17 соединен с выходом устройства 12 и устройством 10. Выход устройства 14 связан с устройством 2.
В случае, когда управляющее воздействие не оказывает влияния на систему, в последней может существовать ощибка. В этом режиме блок реле 16 включает устройство 2, на которое поступает сигнал ощибки. С выхода этого устройства сигнал поступает на множительное устройство 3, где перемножается с сигналом XQ, комленсирующим статическую ошибку. Сигнал, необходимый для компенсации статической ошибки в данный момент, подается в основной контур 4. При достижении минимальной ошибки, которой определяется зона нечувствительности интегрирующего устройства 2, на выходе последнего будет постоянная величина, и, следовательно, с множительного устройства 3 в основной контур 4 поступит постоянная величина, обеспечивающая минимальную ошибку. В этом режиме блоки реле 16 и 17 отключают устройства 6 и 10, которые не изменяют своих выходных величин при наличии ошибки в системе.
При работе системы на постоянной скорости блок реле 16 отключает устройство 2 и подключает устройство 6, причем знак интегрирования соответствует знаку скорости. При появлении ошибки в системе интегрирующее устройство 6 изменяет свою выходную величину,
которая перемножается в множительном устройстве 7 с компенсирующим сигналом, поступающим с дифференцирующего устройства 8.
Часть компенсирующего сигнала с дифференцирующего устройства 8, «омпенсирующего ошибку, пропорциональную скорости входного воздействия лри нормальных условиях, лоступает в основной контур 4 все время.
С выхода множительного устройства 7 сигнал, необходимый для компенсации возникшей ошибки, подается в основной контур 4. При достижении минимальной ошибки, которой определяется зона нечувствительности интегрирующего устройства 6, на выходе этого устройства 6 будет постоянная величина, и, следовательно, с множительного устройства 7 поступит постоянный сигнал, обеспечивающий минимальную ошибку.
В этом режиме блок реле 17 отключает интегрирующее устройство 10, которое при наличии ошибкИ не изменяет своей выходной величины. Измерение ошибки X осуществляется элементом сравнения 18 основного контура, а формирование сигналов компенсации - с помощью сумматоров 19 и 20.
При работе системы на постоянном ускорении блок реле 17 отключает интегрирующие
устройства 2 и 6, которые при наличии ошибки не изменяют своих выходных величин, и подключает интегрирующее устройство 10, причем знак интегрирования соответствует знаку ускорения. При появлении ошибки
устройство 10 изменяет свою выходную величину, которая перемножается в множительном устройстве 11 с компенсирующим сигналом, поступающим с дифференцирующего устройства 12. Часть компенсирующего сигнала
с устройства 12, компенсирующего ощибку, пропорциональную ускорению входного воздействия при нормальных условиях, поступает в основной контур 4 все время. С выхода множительного устройства // сигнал, необходимый для компенсации возникщей ошибки, подается в основной контур 4. По достижении минимальной ошибки, которой определяется зона нечувствительности интегрирующего устройства 10, на выходе этого
устройства будет постоянная величина, и, следовательно, с множительного устройства // будет поступать постоянный сигнал, обеспечивающий минимальную ощибку.
Характер изменения ошибок от скорости и ускорения при отработке системой синусоидального входного воздействия представлен на фиг. 2, где кривые обозначают: 21 - скорость входного воздействия; 22 - зона ошибки, пропорциональной скорости входного воздействия; 23 - зона, где ошибка, пропорциональная скорости, имеет определяющее значение; 24 - ускорение входного воздействия; 25 - ошибка, пропорциональная ускорению эопорциональная ускорению, имеет определящее значение. При синусоидальном входном воздействии в азличные моменты времени нужно настраиать компенсирующие сигналы, пропорциоальные скорости или ускорению. В зоне 23 аботает контур самонастройки 5 компенсирурщего сигнала, пронорционального скорости. зоне 26 работает контур самонастройки 9 эмненсирующего сигнала, пронорционального скорению. Работа контуров самонастройки 5 и 5 в сответствии с фиг. 2 обеспечивается их попереенным включением блоками реле 16, 17, на оторые поступает сигнал, пропорциональный астоте входного воздействия с устройства 15 звлечения корня. С изменением частоты входого воздействия зоны работа контуров самоастройки 5 и 5 будет изменяться и при этом удет изменяться соотношение между ошибой, пропорциональной скорости входного возействия, и ошибкой, пропорциональной ускоению входного воздействия. Предмет изобретения Комбинированный следящий привод, содержащий основной контур с элементом сравне1ия, первый контур самонастройки с диффеенциатором, подключенным к входному зажиly, умножителем, интегратором и элементом .равнения, второй контур самонастройки с инегратором и умножителем, вход которого подключен к элементу сравнения основного контура, и блок реле, отличающийся тем, что, с целью минимизации среднеквадратического значения ошибки при отработке скачкообразного сигнала, сигнала, изменяющегося с постоянной скоростью и ускорением, и синусоидального сигнала с различной частотой, в нем дополнительно установлены последовательно включенные между собой два дифференциатора, делительное устройство, устройство извлечения корня, второй блок реле, интегратор, умножитель и сумматор, подключенный ко входу основного контура, причем вход этого интегратора подключен к выходу элемента сравнения основного контура; вход первого донолнительно включенного дифференциатора подключен параллельными связями к дифференциатору первого контура самонастройки, первому блоку реле, делительному устройству, умножителю первого контура самонастройки и сумматору этого контура, подсоединенному к основному контуру; вход второго дополнительно установленного дифференциатора подключен ко второму блоку реле и входам дополнительно установленных умножителя и сумматора; выход второго дополнительно установленного дифференциатора подключен ко второму входу первого блока реле и интегратору второго контура самонастройки; выход устройства извлечения корня подсоединен к третьему входу первого блока реле, подключенного к интегратору первого контура самонастройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU304550A1 |
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU280613A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU328427A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПАРА КОТЛОАГРЕГАТА | 1991 |
|
RU2044215C1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU318959A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| САМОНАСТРАИВАЮЩИЙСЯ РЕЗОНАНСНЫЙ ФИЛЬТР | 1973 |
|
SU382064A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |