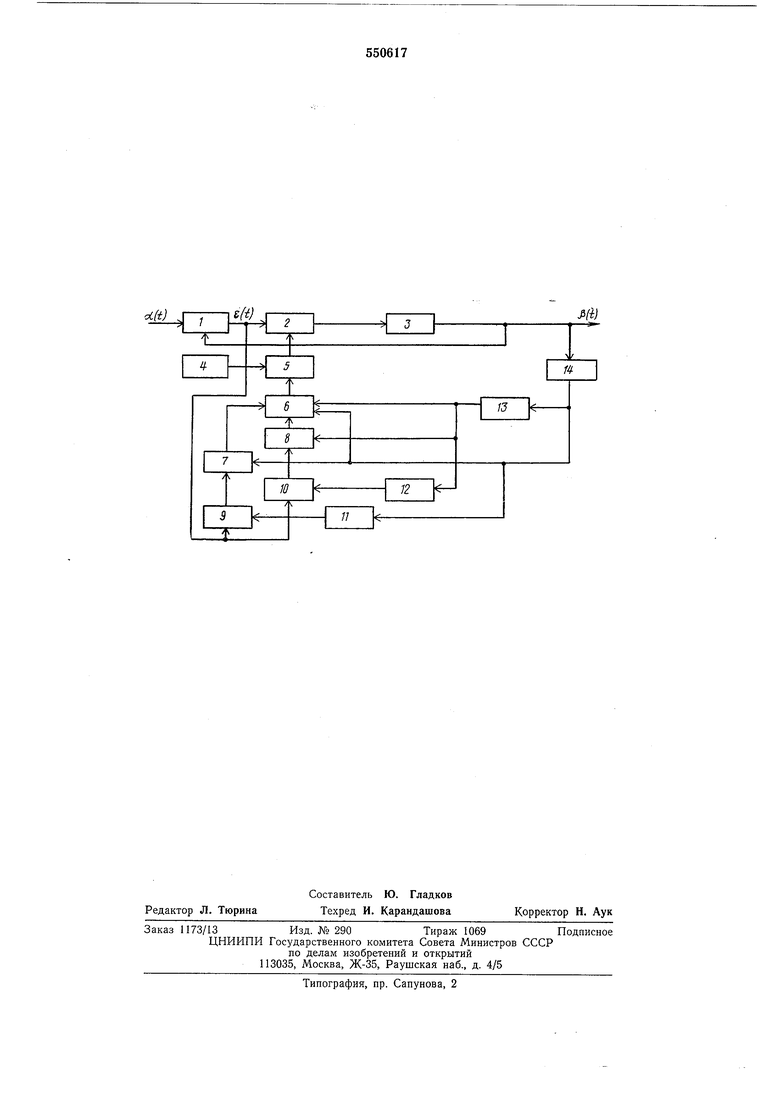
нале ошибки устройства колебательной составляющей, BbidbiBaeMOH нелинейными элементами, имеющими место в реальных системах автоматического регулирования. целью изооретения являемся повыщение точности регулирования нутем повышения эффективности формирования корректирующе1-о сигнала при изменяемых нараметрах корректируемой системы автоматического регулирования. 5 нредложеннои системе это досгигается тем, что в ней установлены второй олок умнолсения и два релейных олока, причем выход второго интегратора через вгорои олок умножения соединен с третьим входом сумматора, выход тахогенератора соединен со вторым входом первого олока умножения, четвертым входом сумматора и через нервыи релейный олок - со вторым входом нервого интегратора, выход дифференциатора соединен со вторым входом второго олока умножения и через второй релейный олок - со вторым входом второго интегратора. иа чертеже представлена олок-схема предложенной системы и приняты ооозначения: i - измеритель рассогласования; 2. - усилитель; а - исполнительный механизм; 4 - генератор импульсов; 5 - фиксатор; b - сумматор; / и - первый и второй олоки умножения; У и 1U - первый и второй интеграторы; 11 и 12 - первый и второй релейные олоки; 6 -дифференциатор; 14 -тахогенератор; а(.) -угол поворота задающего вала; 1)-угол поворота следящего вала. При работе следящей системы осуществляется автоматическая подстройка компенсирующих сигналов, учитывающая изменение параметров корректируемой следящей системы. При рассмотрении алгоритма работы следящей системы на ее вход подается задающее воздействие гармонического характера. При этом точность работы стационарных следящих систем с астатизмом первого порядка при медленно изменяющемся задающем воздействии можно охарактеризовать разложением функции ошибки б(/) в ряд Тейлора: .()С,+. + .... й 21 df s,+e,+ ....,(1) где Ci, Сг - соответствующие коэффициенты ошибок; 81- ошибка, пропорциональная скорости изменения задающего воздействия;82- ошибка, пропорциональная ускорению изменения задающего воздействия. При рассмотрении точности следящей системы с изменяющимися во времени параметрами удобно оперировать понятием условной ошибки. ByW Ti W+T2B2(0 + где 8j(/) и z(t)-средние квадраты соответствующих составляющих ошибки б(0, равные,((t}-dt. где 7i и 72 - весовые коэффициенты. Для минимизации каждой составляющей 8у(/) необходима самонастройка соответствующих составляющих корректирующего сигнала, сформированного по выходному воздействию. Полагая, что в системе переменными являются лишь коэффициенты передачи каналов формирования составляющих корректирующего сигнала /d и К.ч, минимум выражений (3) обеспечивается выполнением следующих условий: д- (t. К,) 2is,.(,;cjx dKi -.hJ,L. dKi (t.K,} 2je,(,/C,)X дК2 .).Q дКг При этом следует учитывать, что п (t, Ki) d.,(t, ATa) - - P2 йЛГа Осуществляя в устройстве самонастройку методом последовательных приближений, изменение параметра можно полагать пропорциональным самой функции. Тогда алгоритм контуров самонастройки сигналов, компенсирующих составляющие ощибки г(1) и 82(0. с учетом того, что формирование корректируемых сигналов производится по выходному воздействию, представить так A/C,-p,|s,(. .(t,K.) А/С -р,/е Реализацию контуров самонастройки можно существенно упростить, если вместо отдельных составляющих ошибки управления Ei(t) и 82(0 использовать саму ошибку управления 8(0 (поскольку выделение отдельных составляющих 8 (О и 82(0 из е(0 зачастую не представляется возможным), а вместо теку„ d)) щих значении и -их знаки. dtdfl Подстройка компенсирующих сигналов заключается в формировании дополнительных сигналов коррекции, которые снимаются с выходов блоков умножения 7 и 8, осуществляющих функции умнол ения сигналов с выхода тахогенератора 14 и дифференциатора 13 на сигналы, процорциональные соответственно изменению добротности системы по скорости и изменению добротности по ускорению, снимаемые с выхода соответствующих интеграторов 9 и 10. Выходные сигналы блоков умножения 7 и 8 суммируются с выходными сигналами тахогенератора 14 и дифференциатора 13 в сумматоре 6. сли имеется определенное соотношение между параметрами корректирующих каналов и основного контура управления и последние - стационарны, то величина фактической ошибки мала. В этом случае передаточные функции интеграторов 9 и 10 можно подобрать такими, чтобы их выходные сигналы были близки к нулю, соответственно при этом выходные сигналы блоков умножения 7 и 8 также по величине близки к нулю, т. е. в дополнительной подстройке составляющих компенсирующего сигнала нет необходимости. В случае же изменения параметров корректируемой системы возрастает фактическая ошибка системы, при этом сигналы интеграто;; ров 9 и 10 растут также. Сигналы с выхода множительных звеньев, пропорциональные произведению выходных сигналов соответствующих интеграторов на сигналы с выхода тахогенератора 14 и дифференциатора 13, суммируясь с основными составляющими компенсирующего сигнала, т, е. сигналами с выхода тахогенератора 14 и дифференциатора 13, производят учет изменения параметров корректируемой системы. При этом релейные блоки 11 и 12, вырабатывающие сигналы, пропорциональные соответственно функциям знака скорости и ускорения выходного воздействия, необходимые для реализации алгоритмовД/С, - р j е (О Sign - dt, Д/Сг « - Ра I е () S:igu- -dt, служат для управления процессом интегрирования фактической ошибки системы. Необходимость релейных блоков объясняется тем, что при симметричных характеристиках элементов системы для полной компенсации 6i(/) и 82 (О необходим один и тот же уровень компенсирующего сигнала. При вращении следящего вала системы в одном из направлений выходные сигналы интеграторов поддерживаются такими, чтобы они способствовали увеличению соответствующих составляющих компенсирующего сигнала при недокомпенсации e.i(t) и еаСО и уменьшению соответствующих составляющих компенсирующего сигнала при перекомпенсации s,(t) и e,z(t). При вращении следящего-вала системы в противоположном направлении изменяется знак как ei(0 и 82(1). так и соответствующих составляющих компенсирующего сигнала. Таким образом, обеспечивается компенсация 61 (О и 82(0 при медленно изменяющихся параметрах основного контура управления. Следовательно, при использовании предложенного устройства существенно повышается точность системы в результате введения контуров самонастройки компенсирующих сигналов, алгоритм работы которых основан на интегрировании сигнала ошиоки, что позволяет повысить качество формирования компенсирующих сигналов. Экспериментальные исследования показали, что использование предложенного устройства повышает точность управления в 1,5 раза. Это значительно расширяет область его применения. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, исполнительный механизм, выход которого через последовательно соединенные тахогенератор, дифференциатор, сумматор и фиксатор, второй вход которого соединен с генератором импульсов, соединен со вторым входом усилителя и непосредственно - со вторым входом измерителя рассогласования, выход которого через последовательно соединенные первый интегратор и первый блок умножения соединен со вторым входом сумматора и непосредственно - со входом второго интегратора, отличающаяся тем, что, с целью повышения точности системы, в ней установлены второй блок умножения и два релейных блока, причем выход второго интегратора через второй блок умножения соединен с третьим входом сумматора, выход тахогенератора соединен со вторым входом первого блока умножения, четвертым входом сумматора и через первый релейный блок- со вторым входом первого интегратора, выход дифференциатора соединен со вторым входом второго блока умножения и через второй релейный блок - со вторым входом второго интегратора.
(i)
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU746405A1 |
| Комбинированный самонастраивающийсяРЕгуляТОР | 1979 |
|
SU853608A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU259227A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| САМОНАСТРАИВАЮЩИЙСЯ РЕЗОНАНСНЫЙ ФИЛЬТР | 1973 |
|
SU382064A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |