2.Споеоб по п. 1, отличающийся тем, что, при изменении знака сигнала блока произведения с положительного на отрицательный форсирующий сигнал, предшествующий изменению, запоминают и суммируют с интегральной составляющей сигнала ощибки частоты вращения.
3.Способ по пп. 1 и 2, отличающийся тем, что при изменении знака сигнала блока произведения с отрицательного на положительный форсирующий сигнал формируют только после предварительного снижения сигнала ошибки ниже порогового значения.
4.Устройство регулирования частоты вращения двигателя внутреннего сгорания, содержащее нелинейный элемент, интегратор, блок .пропорционального преобразования, сумматор и измеритель ощибки частоты вращения, причем выходы последнего подключены к нелинейному элементу, к первому входу интегратора и первому входу блока пропорционального преобразования, выходы которых соединены с входами сумматора, отличающееся тем, что, с целью повышения эффективности регулирования, оно дополнительно содержит дифференциатор, первый и второй нуль-органы, первую и вторую схемы И, первую схему ИЛИ и ключ, причем первый прямой вход первой схемы И соединен с первым инверсным входом второй схемы И и выходом первого нуль-органа, второй прямой вход первой схемы И - с вторым инверсным входом втррой схемы И и выходом второго нуль-органа, вход первого нуль-органа - с входом
дифференциатора и выходом измерителя ощибки частоты вращения, выход дифференциатора связан с входом второго нульоргана, выходы первой и второй схем И соединены с входами первой схемы ИЛИ, выход которой подключен к управляющему входу ключа, входная цепь которого соединена с выходом нелинейного элемента, а выходная - с вторым входом блока пропорционального преобразования.
5.Устройство по п. 4, отличающееся тем, что оно дополнительно содержит коммутатор и соединенные последовательно формирователь модуля, третий нуль-орган, второй одновибратор, вторую схему ИЛИ и первый одновибратор, причем первый вход коммутатору связан с выходом нелинейного элемента, его управляющий вход - с выходом первого одновибратора, а выход - с входом интегратора, второй вход второй схемы ИЛИ соединен с выходом первой схемы ИЛИ, а вход формирователя модуля - с выходом нелинейного элемента.
6.Устройство по пп. 4 и 5, отл чающееся тем, что прямой выход второй схемы ИЛИ подключен к третьему прямому входу первой схемы И и прямому входу второй схемы И.
7.Устройство по пп, 4 и 5, отличающееся Тем, что коммутатор выполнен в виде управляемого переключателя, у которого нормально закрытый контакт связан с входной цепью коммутатора, нормально открытый контакт - с выходной цепью коммутатора, а перекидной контакт подключен к элементу па1ияти, например конденсатору.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1982 |
|
SU1084729A1 |
| Термостатирующее устройство | 1979 |
|
SU842740A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Способ автоматического регулирова-Ния пАРАМЕТРОВ эНЕРгОСиСТЕМы | 1979 |
|
SU843091A1 |
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1978 |
|
SU742874A1 |
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Цифровая система автоматической регистрации веса | 1984 |
|
SU1223045A1 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
1. Способ регулирования частоты вращения двигателя внутреннего сгорания путем измерения сигнала ошибки частоты вращения, преобразования сигнала ошибки по пропорционально-интегральному закону, формирования с помощью нелинейного элемента форсирующего сигнала после достижения сигналом ошибки порогового значе-, ния, суммирования форсирующего сигнала с сигналом, преобразованным по пропорционально-интегральному- закону с получением управляющего сигнала, и воздействия последним на орган трпливоподачи двигателя, отличанущийся тем, что, с. целью повышения эффективности путём .сокращения динамических отклонений и длительности переходных процессов, сигнал ошибки частоты вращения интегрируют с помощью интегратора с получением интегральной составляющей, дифференцируют с помощью дифференциатора, дифференцированный сигнал и сигнал ошибки перемножают с помощью блока произведения, выходным сигналом которого управляют нелинейным элементом с формированием форсирующего сигнала в ви§ де однозначной функции при положительном знаке сигнала блока произведения, приравниванием нулю форсирующего сигнала при изменении знака сигнала блока произведения с положительного на отрицательный и сохранением форсирующего сигнала нулевым до изменения знака сигнала блока произведения с отрицательного на положительный.. Ь О . Ь ел
Изобретение относится к мащиностроению, в частности к двигателестроению, а именно к области автоматического регулирования частоты вращения двигателя внутреннего сгорания.
Известен способ регулирования частоты вращения двигателя внутреннего сгорания путем измерения сигнала ощибки частоты вращения, преобразования сигнала ощнбки по пропорционально-интегральному закону, формирования с помощью нелинейного элемента форсирующего сигнала после достижения сигналом ощибки порогового значения, суммирования форсирующего сигнала с сигналом; преобразованным по пропорционально-интегральному закону с получением управляющего сигнала, и воздействия последним на орган топливоподачй двигателя I.
Известно также устройство для осуществления способа, содержащее нелинейный элемент, интегратор, блок пропорционального преобразования, сумматор и измеритель ощибки частоты вращения, причем выходы последнего подключены к нелинейному элементу, к первому входу интегратора и первому входу блока пропорционального преобразования, выходы которых соединение входами сумматора I.
Однако известные способ и устройство не обеспечивают достаточиого сокращения динамических отклонений и длительности переходного процесса, тем более, что повышение общего коэффициента усиления также ограничено устойчивостью системы регулирования.
Цель изобретения - повышение эффективности путем сокращения динамических отклонений и длительности переходных процессов.
Указанная цель достигается тем, что согласно способу регулирования частоты вращения двигателя внутреннего сгорания путем измерения сигнала ощибки частоты вращения, преобразования сигнала ошибки по пропорционально-интегральному закону, формирования с помощью нелинейного элемента форсирующего сигнала после достижения сигналом ошибки порогового значения, суммирования форсирующего сигнала с сигналом, преобразованным по пропорционально-интегральному закону с получением управляющего сигнала, и воздействия последним на орган топливоподачи двигателя, сигнал ошибки частоты вращения интегрируют с помощью интегратора с получением интегральной составляющей, дифференцируют с помощью дифференциатора, дифференцированный сигнал и сигнал ощибки перемножают с помощью блока произведения, выходным сигналом которого управляют нелинейным элементом с формированием форсирующего сигнала в виде однозначной функции при положительном знаке сигнала блока произведения, приравниванием нулю форсирующего сигнала при изменении знака сигнала блока произведения с положительного на отрицательный и сохранением форсирующего сигнала нулевым до изменения знака сигнала блока произведения с отрицательного на положительный.
При этом при изменении знака сигнала блока произведения с положительного на отрицательный форсирующий сигнал, предшествующий изменению, запоминают и суммируют с интегральной составляющей сигнала ошибки частоты вращения.
Кроме того, при изменении знака сигнала блока произведения с отрицательного на положительный форсирующий сигнал формируют только после предварительного снижения сигнала ошибки ниже порогового значения.
Устройство регулирования частоты вращения двигателя внутреннего сгорания, содержащее нелинейный элемент, интегратор, блок пропорционального преобразования, сумматор и имеритель ошибки частоты вращения, причем выходы последнего подключены к нелинейному элементу, к первому входу интегратора и первому входу блока пропорционального преобразования, выходы которых соединены с входами сумматора, дополнительно содержит дифференциатор, первый И второй нуль-органы, первую и вторую схемы И, первую схему ИЛИ и ключ, причем первый прямой вход первой схемы И соединен с первым инверсным входом второй схемы И и выходом первого нуль-органа.
второй прямой вход первой схемы И - с вторым инверсным входом второй схемы И и выходом второго нуль-органа, вход первого нуль-органа - с входом дифференциатора и выходом измерителя ошибки частоты вращения, выход дифференциатора связан с входом второго нуль-органа, выходы первой и второй схем И соединены с входами первой схемы ИЛИ, выход которой подключен к управляющему входу ключа, входная
0 цепь которого соединена , с выходом нелинейного элемента, а выходная - с вторым входом блока пропорционального преобразования.
Устройство дополнительно содержит коммутатор и соединенные последовательно фор5мирователь модуля, третий нуль-орган, второй одновибратор, вторую схему ИЛИ и первый одновибратор, причем первый вход коммутатора связан с выходом нелинейного элемента, его управляющий вход - с выходом
0 первого одновибратора, а выход - с входом интегратора, второй вход второй схемы ИЛИ соединен с выходом первой схемы ИЛИ, а вход формирователя модуля - с выходом нелинейного элемента.
5 Причем прямой выход второй схемы ИЛИ подключен к третьему прямому входу первой схемы И и. прямому входу второй схемы И.
При этом коммутатор выполнен в виде управляемого переключателя, у которого нормально закрытый контакт связан с входной цепью коммутатора, нормально открытый контакт - с выходной цепью коммутатора, а перекидной контакт подключен к элементу памяти, например конденсатору.
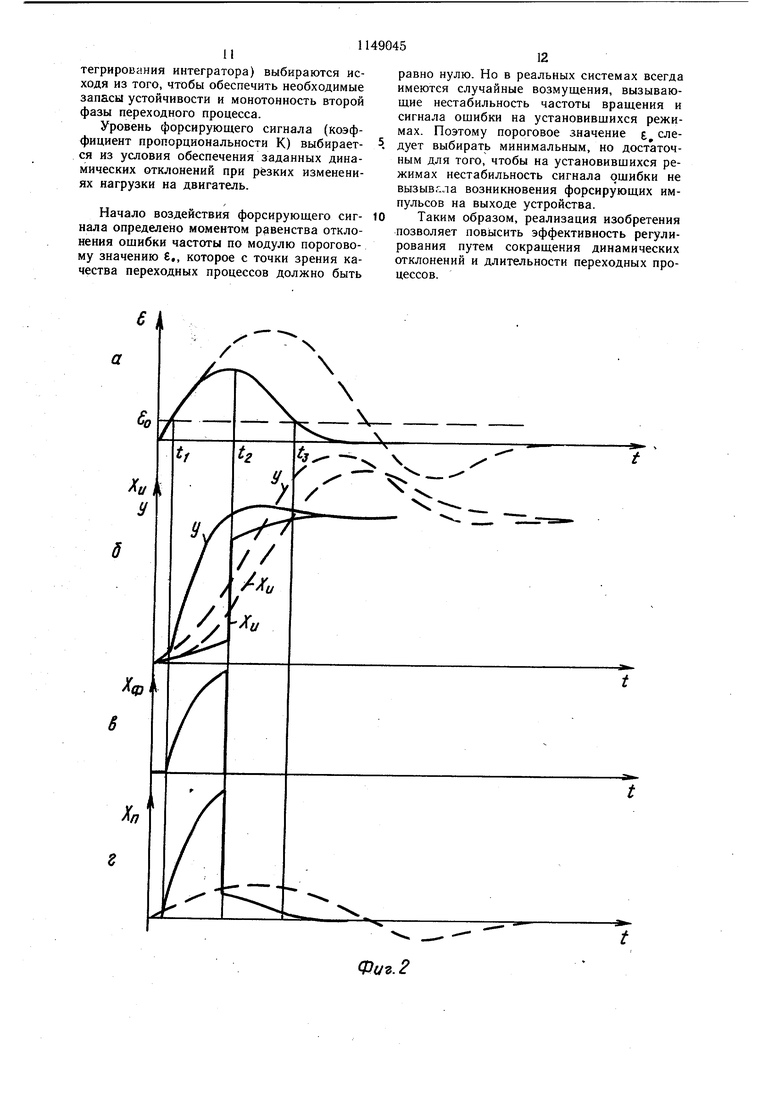
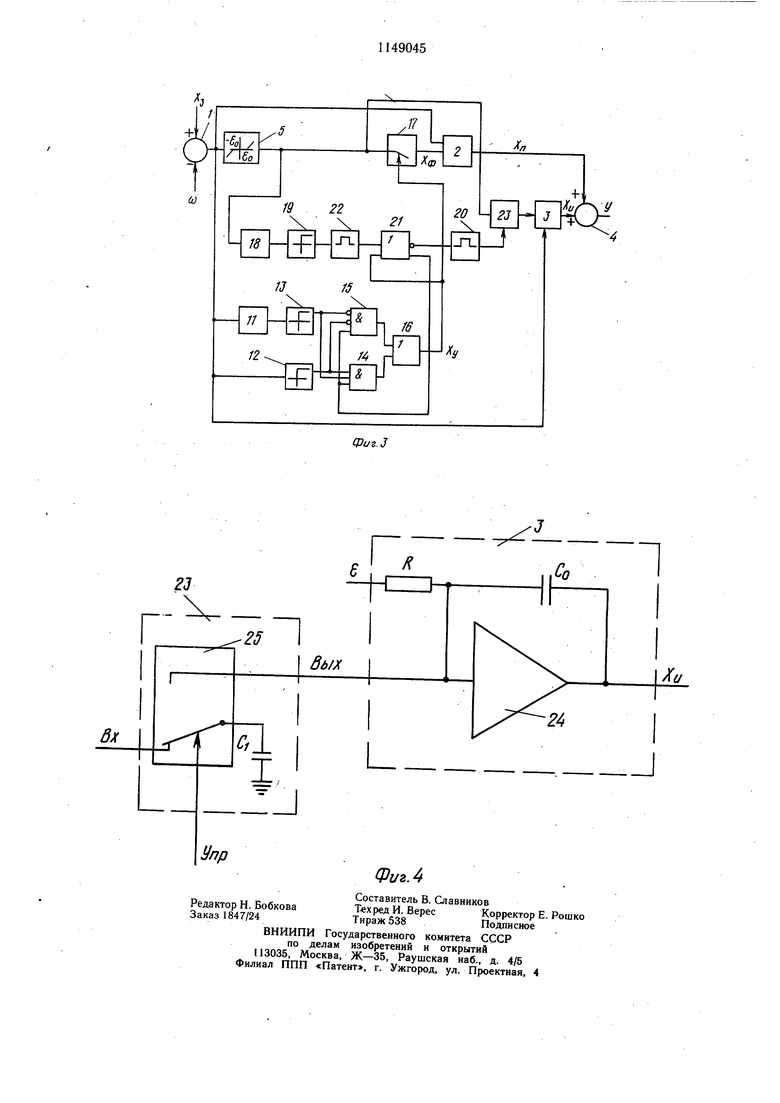
На фиг. 1 изображена блок-схема системы регулирования; на фиг. 2 - временные диаграммы процесса преобразования одних величин в другие; на фиг. 3 - принципиальная схема устройства; на фиг. 4 - схема коммутатора с элементом памяти и
0 подключение его к интегратору.
На фиг. 1-4 обозначено: иг- частота вращения двигателя внутреннего сгорания (регулируемый параметр); сигнал задания; g - сигнал ощибки частоты вращения; Х,р- форсирующий сигнал; Ху- сигнал управления; Хц.- интегральная составляющая сигнала ошибки частоты вращения; Хц - пропорциональная составляющая сигнала частоты вращения; У - управляющий сигнал; Л - сигнал нагрузки;
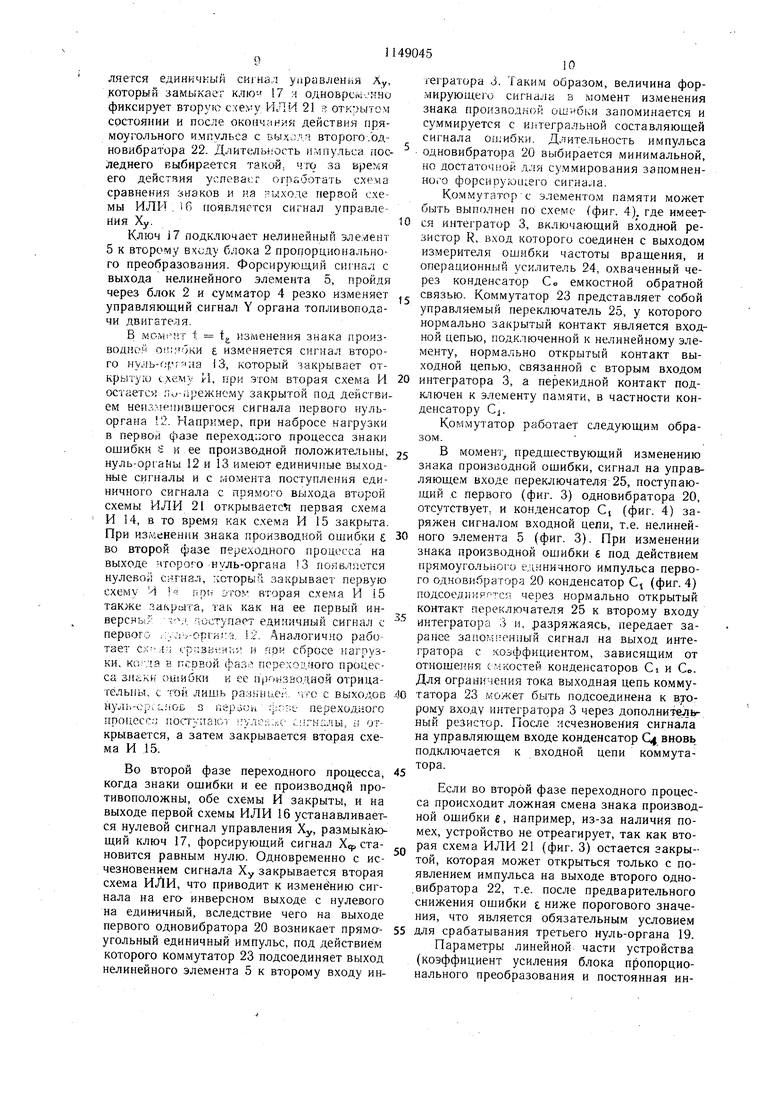
0 GO, С, - конденсаторы; R - резистор, Вх, Вых, У„р - входная, выходная и управляющая цепи коммутатора, соответственно; tj - момент достижения сигналом ошибки порогового значения; ь, t - момент изменения знака произведения сигнала ошибки и его производной; tj - момент вхождения сигнала ошибки в зону порогового значения о. Система (фиг. 1) содержит измеритель 1 сигнала ошибки, блок 2 пропорционального преобразования сигнала ошибки, интегратор 3, сумматор 4, нелинейный элемент 5, дифференциатор 6, блок 7 произведения, формирователь 8 сигнала управления, блок 9 памяти и двигатель 10 внутреннего сгорания (объект регулирования). Формирователь 8 вырабатывает сигнал управления Ху, если знак произведения сигнала ошибки и его производной положителен т.е. Y f О, при E-UO У 1 Ху, при . При поступлении сигнала управления Xv Ф О нелинейный элемент 5 формирует форсирующий сигнал Ху в виде однозначной функции сигнала ошибки, например линейной:, . (О, приХу- О () или 1е1 .. с г г,г, Y -t п /с счл Аф 1К(6 - nrniY.-An/C-Csn iilCl4f fc.), приХу О (S.U) и , где К - коэффициент пропорциональности; , - пороговое значение сигнала ошибки. Способ регулирования осуществляют еледующим образом. На установившихся режимах и при отработке медленно меняюшихся сигналов Л и Хз величина ошибки t меньше порогового значения ., форсирующий сигнал Х ротсутствует и система работает как линейная с пропорционально-Интегральным знаком регулирования, обеспечивая устойчивость и точное поддержание частоты вращения в соответствии с сигналом задания Xj . При мгновенном изменении, в частности, сигнала нагрузки Д, например, в сторону увеличения частоты вращения 10 уменьшается, а ошибка 6 увеличивается. Пунктиром (фиг. 2) изображены переходные процессы при отсутствии форсирующего сигнала Xq по известным способам. Ощибка возрастает до момента, пока управляющий сигнал У органа топливоподачи двигателя не достигнет уровня установившегося режима, после чего ощибка с некоторым перерегулированием уменьщается до нуля. Сигнал У содержит интегральную XIL и пропорциональную Хд составляющие, уровень воздействия которых, как, указывалось, ограничен устойчивостью регулирования. В первой фазе переходного процесса при возрастании ошибки е произведение е-ё О, формирователь 8 (фиг. 1) вырабатывает сигнал управления Ху, воздействующий на управляющий вход нелинейного элемента 5, который с момента t tt (фиг. 2) достижения ошибкой порогового значения о формирует форсирующий сигнал Хф. Последний, пройдя через блок 2 пропорционального преобразования (фиг. 1) и сумматор 4, резко изменяет управляющий сигнал У органа топливоподачи двигателя 10 и компенсирует изменение сигнала нагрузки А (фиг. 2, моменты времени от ti до t когда ), в результате чего рост ошибки замедляется. Выходной сигнал блока 9 памяти (фиг. 1) в первой фазе переходного процесса (-6 0) отсутствует, а сигнал Хц и.нтегратора 3 равен где Тц - постоянная интегрирования. В момент t ti сигнал У достигает своего установившегося значения, и рост ошибки прекрашается (фиг. 2). Динамическое отклонение ошибки t меньше, чем в известных способах, в силу того, что сигнал Y топливоподачи двигателя 10 раньше „,„,„ру, изменение сигнала нагруэОдновременно в момент t t происходит изменение знака произведения сигнала ошибки и его производной с положительного ошибки и его производной с положительного на отрицательный, в результате чего сигнал управления Ху формирователя 8 и форсирую нелинейного элемента 5 ста „„ -Р Благодаря этому во второй фазе переходного процесса (с работает в .линейном ре исключается перерегулирование снижение запасов устойчивости Однако вторая фаза переходного процесса затянута по времени и имеет колебательный характер, так как после исчезновения форсирующего сигнала Хф управляющий сигнал Y вновь становится меньше сигнала нагрузки;( , что вызывает в свою очередь изменение знака производной сигнала ошибки и появление форсирующего усигнала и т.д. Переходный процесс заканчивается только тогда, когда интегральная составляющая Хц достигнет своего установившегося значения. Для сокращения длительности второй фазы переходного процесса и исключения колебательности в момент t tj изменения знака произведения сигнала ошибки и его производной с положительного на отрицательный блок 9 памяти по заднему фронту сигнала Ху, запоминает уровень форсирующего сигнала Х., предществующий изменению знака, и запомненный сигнал суммируется с интегральной составляющей и интеграторе 3 (фиг. 1), после чего сигнал блока памяти снимается. Сигнал Хц с момента ta равен Хи X,, при t j(t)rft и имеет форму, показанную на фиг. 2. Благодаря переходу форсирующего сигнала Х,р из пропорциональной составляющей в интегральную суммарный сигнал У в момент t tz не изменяется. Поэтому ошибка (фиГ. 2) быстро и монотонно уменьшается до нуля, а частота вращения восстанавливается до своего установившегося значения.
Для того, чтобы во второй фазе переходного процесса на выходе нелинейного элемента 5 (фиг. 1) не появился форсирующий сигнал в силу ложной смены знака произведения сигнала ошибки и его производной с отрицательного на положительный, например в связи с наличием в системе помех, при указанной смене знака с момента t t нелинейный элемент 5 блокирует формирователь 8 так, что последний вырабатывает сигнал управления Ху с момента t j (фиг. 2) вхождения сигнала ошибки в в зону порогового значения е,.
Устройство (фиг. 3) для реализации предлагаемого способа, кроме измерителя 1 ошибки частоты врашения, блок 2 пропорционального пр еобразования, интегратора 3, сумматора , нелинейного элемента 5, реализующего зону нечувствительности с порогом е« и усиление входного сигнала, содержит диффереициа р 11, первый 12 и второй 13 нульорганы, первую 14 и вторую 15 схемы И, первую схему ИЛИ 16, управляемый ключ 17, формирователь 18 модуля, третий нульорган 19, первый одновибратор 20, вторую схему ИЛИ 21, второй одновибратор 22 и коммутатор 23.
Выход измерителя 1 ошибки Частоты вращения подключен к первым входам блока 2 пропорционального преобразования и интегратора 3, выходы которых соединены с входами сумматора 4. Указанные элементы и связи между ними образуют линейную часть устройства.
Нелинейный форсирующий сигнал вырабатывается нелинейным элементом 5. Вход его подключен к измерителю 1 ошибки, а выход - к входу коммутатора 23 и через ключ 17 к второму входу блока 2 пропорционального преобразования. Ключ 17 управляется схемой сравнения знаков ошибки е н ее производной. С этой целью вход первого нуль-органа 12 и через дифференциатор 11 вход второг о нуль-органа 13 соединены с измерителем 1 ошибки, выход первого нуль-органа 12 подключен к первому прямому входу первой схемы И 14 и к первому инверсному входу второй схемы И 15, выход второго нуль-органа 13 - к второму прямому входу первой схемы И 14 и к второму инверсному входу второй схемы И 15, а выходы первой 14 и второй 15 схем И - к входам первой схемы ИЛИ 16, выход которой является сигналом управления Ху схемы сравнения.
Для,запоминания сигнала с выхода нелинейного элемента 5 и подачи указанного сигнала на второй вход интегратора в момент смены знака произведения е- ё с положительного -на отрицательный служит коммут тор 23. Управляемый первым одновибратором 20, вход которого соединен с инверсным выходом второй схемы ИЛИ 21, у которой первый вход соединен с выходом первой схемы ИЛИ 16.
Для блокировки схемы сравнения знаков ошибки и ее производной прямой выход второй схемы ИЛИ 21 подключен к третьему прямому входу первой схемы И 14 н прямому входу второй схемы И 15, а второй вход второй схемы ИЛИ 21 через поеледовательO но соединенные формирователь модуля 18, третий нуль-орган 19 и второй одновибратор 22 подключен к выходу нелинейного элемента 5.
Устройство для реализации предлагаемоj го способа работает следующим образом.
На установившемся режиме и при отработке медленно меняющихся сигналов нагрузки Л и задания Xj величина ошибки меньше порогового значения ., форсируюший сигнал на выходе нелинейного элемента 5 отсутствует, на сумматор 4 поступают сигналы, пропорциональные .ошибке с блока 2 пропорционального преобразования и интегралу от ошибки с интегратора 3, т.е. устройство осуществляет линейное регулирование по пропорционально-интегральному закону и обеспечивает устойчивость и точное поддержание частоты вращения в соответствии с сигналом задания Xj.
В переходном режиме при изменении нагрузки А в первой его фазе сигнал ошибки 0 и его производная имеют одинаковые знаки, поэтому сигналы С нуль-органов 12 и 13 одинаковы (либо нулевые, либо единичные) . Однако пока ошибки по модулю меньше s, схем И 14 и 15 остаются закрытыми, то на их прямые входы действует нулевой сигнал с прямого выхода второй схемы ИЛИ 21. Сигнал управления Ху с выхода первой схемы ИЛИ 16 также отсутствует.
С момента t tj достижения ошибки порогового значения нелинейный элемент 5 формирует форсирующий сигнал. Одновременно сигнал появляется на выходе формирователя 18 модуля, вызывающий срабатывание третьего нуль-органа 19, под действием которого на выходе второго одновибратора 22 возникает прямоугольный единичный импульс. На прямом выходе второй схемы ИЛИ 21 появляется единичный сигнал, при этом одна из двух схем И 14 и 15 оказыJJ вается открытой, схема И 14, если знаки ошибки е и ее производной положительны и, следовательно, выходы нуль-органов 12 и 13 имеют единичное значение (при набросе нагрузки на двигатель), или схема И 15, если знаки ошибки 6 и ее производной отрицательны и выходы нуль-органов 12 и 13 имеют нулевое значение (при сбросе нагрузки на двигатель). В этом случае на выходе первой схемы ИЛИ 16 также появляется единичный сигнал управления Ху, который замыкает клю- 17 м одноврем.нно фиксирует вторую схему ИЛИ 21 з открытом состоянии и после окончания действия прямоугольного импульса с Bbtxo.vi второго .одновибратора 22. Длительность импульса последнего выбирается такой, что за время его действия успевает огработать схема сравнения знаков и р.э ыходе первой схемы ИЛИ, (б появляется сигнал управления Ху. Ключ 17 подключает нелинейный элемент 5 к второму вхаду блока 2 проггорцнонального преобразования. Форсирующий сигнал с выхода нелинейного элемента 5, пройдя через блок 2 и сумматор 4 резко изменяет управляющий сигнал Y органа топливоподачи двигателя. В мо.мрнт 1, tj, изменения знака производном изменяется сигнал второго н-уль-г;рг1иа 13, который закрывает открытущ схему И, при это.м вторая схема И остается пи-прежнему закрытой под действием неизменившегося сигнала первого нульоргана 12. Например, при набросе нагрузки в первой фазе переходного процесса знаки ошибки S к ее производной положите чьны, нуль-органы 12 и 13 имеют единичные выходные сигналы и с момента поступления единичного сигнала с прямого выхода второй схемы ИЛИ 21 открываете первая схема И 14, в то время как схема И 15 закрыта. При изменении знака производной ошибки во второй фазе переходного процесса на выходе нторого нуль-органа 3 появляется нулевой сигнал, который закрывает первую схему 4 1ч sps; этом вторая схема И 5 также за(чрыта, так как на ее первый инверсных 4-, поступает единичный сигнал с первого г:у.;;..-рргига. 2. Аналогично рабо тает сх-д;; сразв н -;; и при сбросе нагрузки. в первой ( порехоа,1ого процесса 3H;iKK ошибки к ее произйо.шой отрицательны, с той лишь разницей, vтo с выходов нуль-ср1.лОБ в nep6os4 переходного процесс; поступают иул: й:;;е сигналы, i открывается, а затем закрывается вторая схема И 15. Во второй фазе переходного процесса когда знаки ошибки и ее производндй противоположны, обе схемы И закрыты, и на выходе первой схемы ИЛИ 16 устанавливается нулевой сигнал управления Ху, размыкающий ключ 17, форсирующий сигнал Хф становится равным нулю. Одновременно с исчезновением сигнала Ху закрывается вторая схема ИЛИ, что приводит к изменению сигнала на его- инверсном выходе с пулевого на един-ичный, вследствие чего на выходе первого одновибратора 20 возникает прямаугольный единичный импульс, под действием которого коммутатор 23 подсоединяет выход нелинейного элемента 5 к второму входу интегратора 3. Таким образом, величина формируюш,его сигна.ча в момент изменения знака производной ошибки запоминается и суммируется с интегральной составляющей сигнала оилибки. Длительность импульса одновибратора 20 выбирается минимальной, но достаточной для сум.мирования запомненHOiO форсируюа;его сигнала. Коммутатор с элементом памяти может быть выполнен по схеме (фиг. 4). где имеет ся интегратор 3, включающий входной резистор R, вход которого соединен с выходом измерителя ошибки частоты вращения, и операционный усилитель 24, охваченный через конденсатор Со емкостной обратной связью. Коммутатор 23 представляет собой управляемый переключатель 25, у которого нормально закрытый контакт является входной цепью, подключенной к нелинейному элементу, нормально открытый контакт выходной цепью, связанной с вторым входом интегратора 3, а перекидной контакт подк тючен к элементу памяти, в частности конденсатору Cj. Коммутатор работает следующим образом. В момент предществующий изменению знака производной ошибки, сигнал на управляющем входе переключателя 25, поступающий с первого (фиг. 3) одновибратора 20, отсутствует, и конденсатор GI (фиг. 4) заряжен сигналом входной цепи, т.е. нелинейного элемента 5 (фиг. 3). При изменении знака производной ошибки под действием прямоугольного единичного импульса первого одновибратора 20 конденсатор С, (фиг. 4) подсоед И р.--с;1 через нормально открытый контакт переключателя 25 к второму входу интегратора 3 и, разряжаясь, передает заранее за ;ом :енныи сигнал на выход интегратора с коэффициентом, зависящим от отнощення емкостей конденсаторов Ci и Со. Для ограничения тока выходная цепь ко.ммутатора 23 .может быть подсоединена к второму входу интегратора 3 через дополнитель-, ный резистор. После исчезновения сигнала на управляющем входе Конденсатор €4 вновь подключается к входной цепи коммутатора. Если во второй фазе переходного процесса происходит ложная смена знака производной ошибки е, например, из-за наличия помех, устройство не отреагирует, так как вторая схе.ма ИЛИ 21 (фиг. 3) остается закрытой, которая может открыться только с появлением импульса на выходе второго одновибратора 22, т.е. после предварительного снижения ошибки е ниже порогового значения, что является обязательным условием для срабатывания третьего нуль-органа 19. Параметры линейной части устройства (коэффициент усиления блока пропорционального преобразования и постоянная интегрирования интегратора) выбираются исходя из того, чтобы обеспечить необходимые запасы устойчивости и монотонность второй фазы переходного процесса.
Уровень форсирующего сигнала (коэффициент пропорциональности К) выбирается из условия обеспечения заданных динамических отклонений при резких изменениях нагрузки на двигатель.
Начало воздействия форсирующего сигнала определено моментом равенства отклонения ощибки частоты по модулю пороговому значению ,, которое с точки зрения качества переходных процессов должно быть
равно нулю. Но в реальных системах всегда имеются случайные возмущения, вызывающие нестабильность частоты вращения и сигнала ощибки на установивщихся режимах. Поэтому пороговое значение следует выбирать минимальным, но достаточным для того, чтобы на установивщихся режимах нестабильность сигнала ощибки не вызывг.ла возникновения форсирующих импульсов на выходе устройства.
Таким образом, реализация изобретения позволяет повысить эффективность регулирования путем сокращения динамических отклонений и длительности переходных процессов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РЕГУЛЯТОР СКОРОСТИ НЕПРЯМОГО ДЕЙСТВИЯ | 0 |
|
SU344419A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
