Предлагаемое устройство относится к отрасли точного приборостроения.
Известно устройство для измерения погрешности кинематической цепи, содержащее следящую систему с фазовращателем н преобразователем «угол-фаза с электрической редукцией, в котором ротор преобразователя кинематически соединен с ти.оходным конечным звеном проверяемой цепи, ротор фазовращателя через вспомогательный редуктор присоединен к быстро.ходному конечному звену цепи, а статор фазовращателя кинематически связан с валом исполнительного двигателя следящей .системы и с отсчетным устройством.
Известное устройство обеспечивеат измерение кинематической погрешности в любом режиме эксилуатации проверяемой цепи и высокую точность измерения при проверке цепей .с больщим передаточным числом. Однако при проверке цепей с малым передаточным числом (менее 5) точность измерения известного устройства снижается, что обусловлено влиянием вспомогательпого редуктора.
Предложенное устройство отличается от известного тем, что конечные звенья проверяемой цепи кинематически соединены с преобразователями «угол - фаза, коэффициенты электрической редукции которых связаны между собой через передаточное число цепи, а выходы преобразователей подключены ко
входам электронного блока, причем один из ннх подключен через фазовращатель, ротор которого соединен с валом исполнительного двигателя.
5 Это позволяет повысить точность измерения кинематической погрещности цепей с малым передаточным числом.
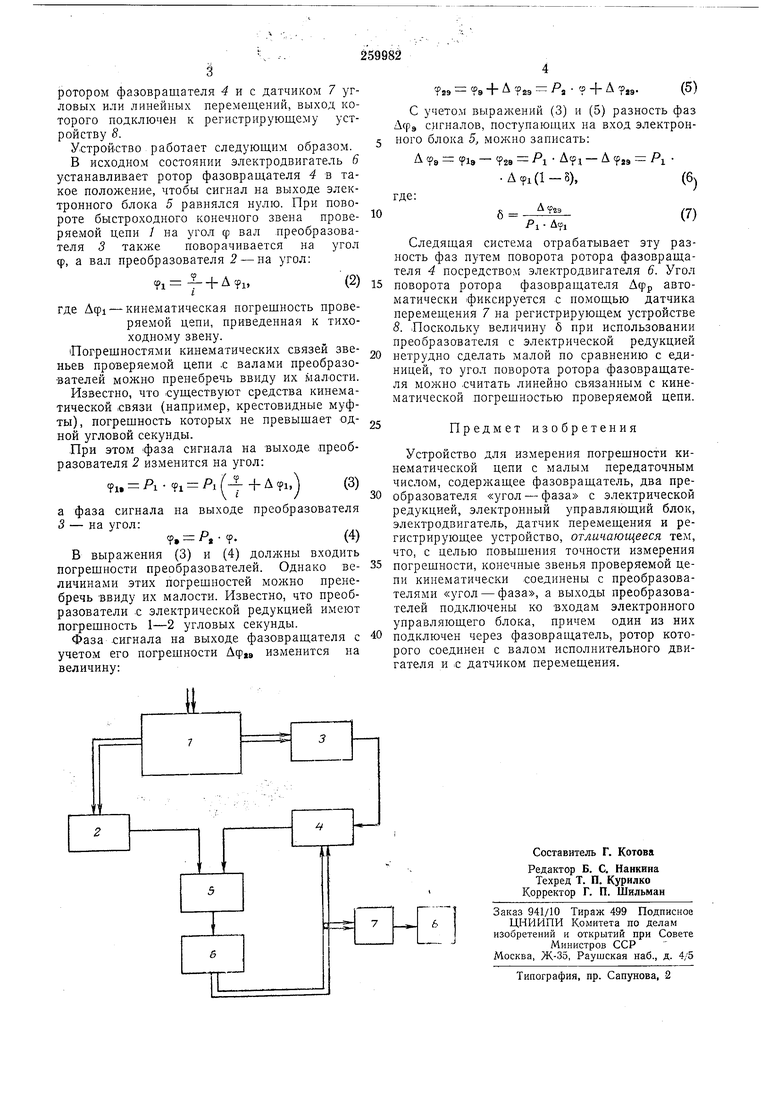
Блок-схема устройства, приведенная на чертеже, состоит из проверяемой цепи 1. преобразователя «угол - фаза 2 с коэффициентом электрической редукции PI, преобразователя «угол - фаза 5 с коэффициентом электрической редукции РЗ, фазовращателя 4, электронного блока 5, электродвигателя 6, 7 угловых или линейных перемещений и регистрирующего устройства 8. Тихоходное конечное звено нроверяемой цепи кинематически соединено с валом преобразователя 2, а быстроходное - с валом преобразователя 3. Коэффициенты электрической редукции преобразователей 2 и 5 связаны соотношением.
Pi f-P2,(1)
где i-передаточное число проверяемой цепи. .Выход преобразователя 2 подключен к одному из входов электронного блока 5. К его другому входу подключе через фазовращатель 4 выход преобразователя 3. Электронный блок 5 управляет работой электродвига
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ КИНЕМАТИЧЕСКОЙ ЦЕПИ | 1968 |
|
SU221783A1 |
| ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА С КОМБИНИРОВАННЫМ | 1971 |
|
SU318016A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ — ФАЗА — КОД | 1973 |
|
SU409268A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ УЛЬТРАЗВУКА | 1970 |
|
SU287433A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Система управления следящим приводом портала машины термической резки | 1990 |
|
SU1757811A1 |
