следящей сн6тер«ш (исполнительный двигатель работает от сигнала расеогласйвания следящей системы с парамет piniscici-tM датчиком), что ие позволяет оценить ее дниамическне свойства.
Целью изобретения является повыше ние точностиавтоматической проверки след$пцей системы с определеш ем не тслысо стат1гческой, но и динамической погрешности.
Поставленная цель достигается тем, что в уЬтройство введены сумматор, ieryлятop напряягения иесушей частоты, первый и второй редукторы и фильтр высоких частот, вход которого подюио. чей к выходу синхронного детектора, а выход - к входу реги(гр фуютдегб узла, модулятор параметрического генератора Кинематически связан с ВХОД иым валом следяшей системы через первый редуктор, а с входным валом фазовращателя черео второй редуктор, вход регулятора напряжения несушей 4acTOTti соединен с первым выходом следшдей системы, а выход - с одним из входов сумматора, другой вход ко торого соещгаен со вторьтм выходом следящей системы , а выход сумматора подключен к входу слешпией системы.
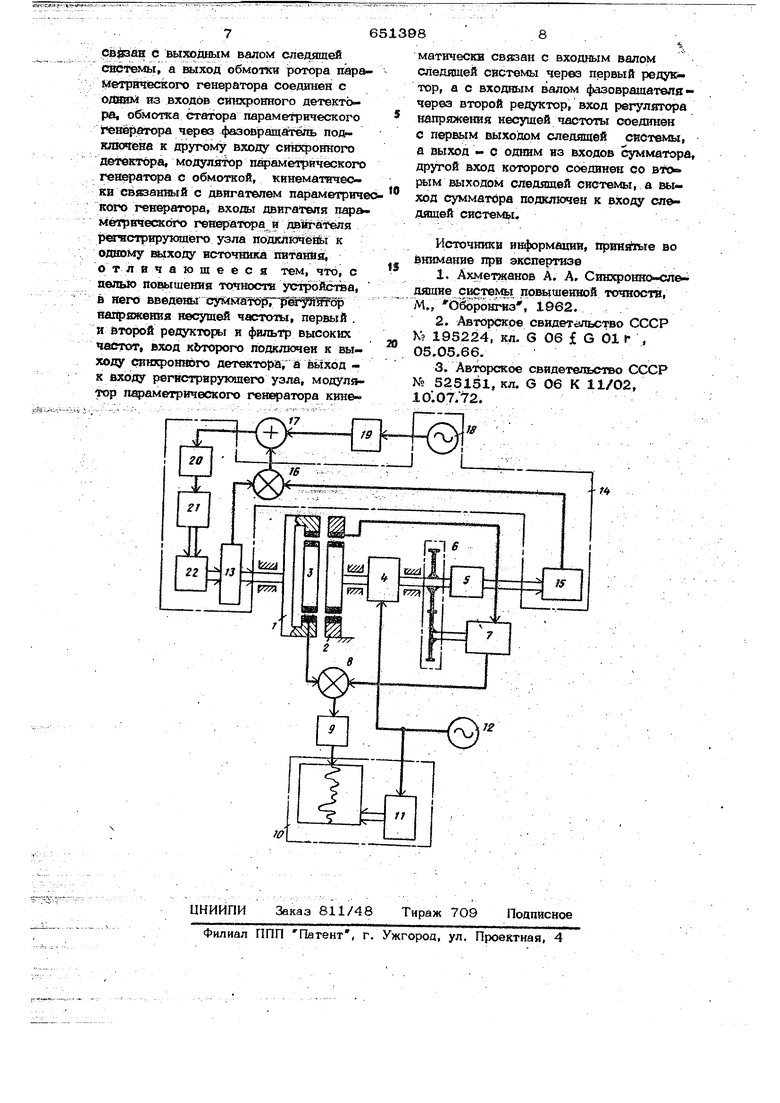
На , чертеже представлена пр1инцигшаль ная схема устройства,
Предлагаемое устройство состоит вз параметрического ген ератора, в которьтй входит ротор 1 с обмоттсами и числом пар полюсов р , статор 2 с обмотками и числом пар полюсов р + 1 (или р- 1) и модулятор 3 с обмотками, укреплш ный jja оси синхротшого двигателя 4, KjiHeviaiirqecKH свяэашюго с редуктором 5 и ведущим колесом одноступенчатого редуктора 6, ведомое колесо которого укреплейо на оси фазовращателя 7. Вход фазбвращателя 7 соединен с обмоткой статора 2, а выход - с первым входом. инхрЪйног детектора 8, второй вход которого сжедйнен с обмоткой ротора 1„
К выходу Детектора 8 подключен вход фильтра 9 высоких частот, выход которого соединен со входом регистрирующего узла 10. Вал лентопротяягаого механизма .узла 1О кинематически CBSH ан с валом (синхрртшого) двига1©ля 11 регистриругсялего узла. Входы синзо. онных двигателей 11 и 4 подключены источнику 12 питания.
С валом ротора 1 сопрягается ротор шгополюсного приемника 13 проверяв ой следящей систе «.1 14. Выход двух
пол осного датчика 15 проверяемой дяшей системы кинематически связан с penjacT-opoM 5 и подключен к первому входу блока 16 cpaBHejfflH, ко второму входу которого подключен выход прие ника 13..
Выход блока 16 сравне1шя подклю чен к сумматору 17, к щ угому входу которого подключен источник 18 напряже- тш несущей частоты через регулятор 19 напряжения. Выход сумматора 17 соединен со входом усилителя 20, вы ход которого соединен со входом испог шгтельного двигателя 21, кинемати геоки связанного с приемником 13 через редуктор 22.
Блоки 13, 15, 16, 18, 20-22 составляют следящую систему передачи угла.
Передаточные отноигения редукторов 5 и 6 выбраны Соответстветго равнь мй
р
.
р .
IJ « ) S 1
где : рр
РО - коэффициент электрической
редукции приемгшка проверяемой следяшей системы; : -., . ..
И - коэффициент электрической редукции параметрического датчика.
Предложешгое устройство работает слеадпющим образом. .
Синхроню 1й двигатель 4 вращает модулятор 3 со скоростью И {|д и через редуктор 5 с передаточгаьгм отношением fg - вал двузсподюсного датчиса 15 со скорхзтью Пи к Сигнал, снимавмы и с датчика 15, сравнивается с сигналом многополюсногоприемника ,13. Результат сравнения складывается на сумматоре 17 с постоя1шьгм по амплитуде и фазе напряжением, поступающим от источника 18 йапряжерия несущей частоты через регулятор 19. Сигнал, снимаемый с сумматора 17, обрабатывается приводом следящей системьт, состоящим из усилителя 20 исполнительног двигателя, исполнительного двигателя 21 и редуктора 22. Двигатель 21 вра« щает ротор приемника 13 и ротор 1 параметрического датчика со скоростью N определявмой фовмулой: fl/л: -is. .
(1)
N
Напряжение, снимаемое с ротора 1
(с числом пар полюсов р ) параметрн ческого датчика, имеют частоту;
f tNtn lp.
Напряжение, снимаемо© 2 (с числом пар полюсов нмеет частоту
f.
2 wv(P
Частота напряж еняя, С1шмаемогЬ с фазовращателя 7, равна сумме частхуйл напряжетгая, поступающего на exb/i фазовращателя, и скорости вращения- eiro.. ротора:
lJ--n„((, (4)
где (l - 6 ) - передаточное отношение редуктора 6, величина выбирается из УСЛОВИЯ
-fc-(5)
Из формул (2) и (4) следует, что равенство f г | g , необходимое для работы синхронного детектора 8 в р& жиме фазового дискриминатора, будеч выполняться при;
(6)
В этом случае детектор 8 выделяет следующие погрешности измерительного предложенного устройства и проверяемой следгяшей системы:
-погрешность параметрического датчика с частотой изменения, равной скорости вращения модул$1тора SfAi i -погрешгюсть редуктора 6 и фазовраща. теля 7 с частотой, равной скорости вращешя ротора фазовращателя
д2 ),
-погрешность приемника 13 с частотой, равной скорости прохождения ротором приемника 13 одного полюсного делешя
Ро
f ДЗе Мро sgn.
м р
-погрешность редуктора 5 и датчика 15 с частотой, равной скорости вращения ротора датчика ISf А4 f АЗ, -погрешность приемника 13, обусловленную его конструктивными особенности ми, с частотой f&s «4|дз.
При шлиолнеаии условия (б) погрешности с частотами 1м и f &г , (которые на порядок и более превосходят чазтоты|д.а f 44 и AS ) отфильтровываются фильтром 9 ыоЕсоких частот, в ре1 йстрнрующев устройство 10 зага
сывает спйстр погрешностей, обусловлен ных проверяемой следящей системой, состоящей из многополюсного приек ника 13 и двухполюсного датчика IS
Погрешность от редуктора является малой величиной.
Таким образом используя параметрический датчик с числом пар полюсов обмотки ротора 1,отличающимся на
едйнипу от числа пар полюсов обмот«и статора 2, удается перенести составляю щне погрешности измерительного уть, ройства с параметрическим Д0ТЧЗЕПСОМ в область высоких частот по сравЬешпо с составляюпшми яогрёшности проверяв мой следящей системы, частоты которых могут быть выбраны при проек-гаровании устройства сколь угодно, малыми,. При этом применение прос-гейшего фильтра, например, в виде йнтегрируткйяёй НС- цепи, позволяет исключить погрешнбо ти измерительного устройства.
Для определенна динамической погрш -.
5 ности проверяймЬй следящей системы шлход устройства сравнения отключается от входа сумматора 17. Затем с помо- шью регулятора 19 напряжения на втором входе сумматора устанавливается напряжение, необходимое для врашення посредством йcпoлIШтeJйэHoгo двигателя 21 ротора приемника 13 проверяемой следяшей системы со скоростью N , оп« реДел5 емой формулой (l). После этого выход устройства сравнения 16 подклкм чается к входу сумматора 17, и пронэ. водится запись погрешности проверяемой следящей системы 2
Добротность по скорости npoBepsjsMofl следяшей системы определяется по формуле
.
(7)
D
5
(,-(Дсек/
где Q-I погрешность системы, записанная при нулевом напряжении на выходе регулятора 19,
Формула изобретения
Устройство контроля следящей сиотемы передачи угла, содержащее пар& метрический генератор, состоящий из ротора, статора и модул5ггора с обмот ками, ротор с обмо-псой кинематически
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Преобразователь угла поворота вала в фазовый сдвиг двух напряжений | 1975 |
|
SU632895A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
