Известны устройства для измерения погрешности кинематической цепи, содержащие фазовращатель, преобразователь «угол- фаза, электронный блок, датчик перемещения и электродвигатель.
Описываемое устройство отличается тем, что ротор фазовращателя присоединен к быстроходному конечному звену кинематической цепи через вспомогательный редуктор, а статор фазовращателя соединен с валом исполнительного двигателя, управляемого электронным блоком, и с датчиком перемещений.
Это позволит повысить точность измерения погрешности кинематической цепи.
На чертеже приведена блок-схема устройства.
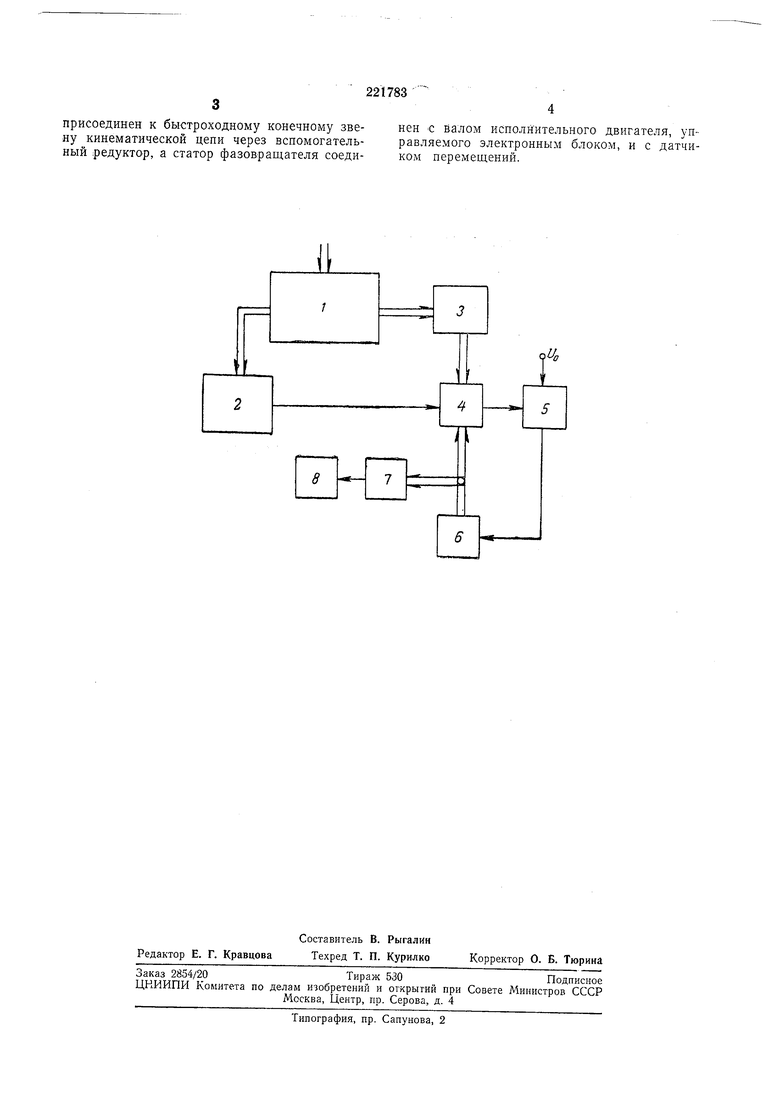
Устройство содержит проверяемую кинематическую цепь 1, преобразователь 2 «угол- фаза с электрической редукцией, вспомогательный :редуктор 3, фазовращатель 4, электронный блок 5, электродвигатель 6, датчик 7 перемещения и регистрирующее устройство 8.
Тихоходное конечное звено проверяемой цепи / кинематически соединено с валом преобразователя 2, а быстроходное конечное звено через вспомогательный редуктор. 3 соединено с ipOTOpoM фазовращателя 4. Выход преобразователя 2 через фазовращатель 4 подключен к входу электронного блока 5 следящей системы. На другой вход электронного
блока 5 подается опорный сигнал UD с частотой, равной частоте управляющего сигнала. Электронный блок управляет работой электродвигателя 6, вал которого кинематически связан со статором фазовращателя 4 и с датчиком угловых или линейных перемещений 7, выход которого подключен к регистрирующему устройству 8.
При повороте быстроходного конечного звена проверяемой цепи /на угол ф возникает разность фаз управляющего и опорного сигналов, поступающих на вход электронного блока 5.
Следящая система отрабатывает эту разность фаз путем поворота статора фазовращателя 4 при помощи электродвигателя 6. Угол поворота статора, пропорциональный кинематической погрешности проверяемой цепи, фиксируется при помощи датчика перемещения 7 на регистрирующем устройстве 8.
Предмет изобретения
Устройство для измерения погрешности кинематической цепи с большим передаточным числом, содержащее фазовращатель, преобразователь «угол-фаза, электронный блок, датчик перемещения и электродвигатель, отличающееся тем, что, с целью повышения точности измерения, ротор фазовращателя
присоединен к быстроходному конечному звену кинематической цепи через вспомогательный редуктор, а статор фазовращателя соединен С йалом исполнительного двигателя, управляемого электронным блоком, и с датчиком перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ КИНЕМАТИЧЕСКОЙ ЦЕПИ | 1970 |
|
SU259982A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ МЕХАНИЗМОВ | 1963 |
|
SU453563A1 |
| Устройство для проверки фазовращателей | 1975 |
|
SU525997A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЛИНЕЙНОСТИ ХАРАКТЕРИСТИК ПРЕОБРАЗОВАТЕЛЕЙ УГОЛ-ФАЗА | 1971 |
|
SU310279A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| Устройство для управления шаговым режимом работы конвейера | 1988 |
|
SU1747359A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ УЛЬТРАЗВУКА | 1970 |
|
SU287433A1 |
| ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА С КОМБИНИРОВАННЫМ | 1971 |
|
SU318016A1 |
fJo
