Известны автоматические захваты для контейнеров, включающие несколько комплектов захватных органов, закрепленных на подвижных в горизонтальном направлении балках для подведения их к захватываемой части контейнера. Однако эти захваты не обеспечивают перегрузку контейнеров, снабженных как петлями, так и рымами.
Предлагаемый автоматический захват отличается от известных тем. что каждый захватный ортан комплекта выполнен клещевидным, одна из клещевин которого представляет подхватную лапу с клкнозым носком, а другая- Г-образный прижим с боковглм скосом, и обе они шарнирнр прикреплены; первая с помощью стяжки, а вторая непосредственно к вертикальному элементу, жестко соединенному с подвижной балкой так, что вместе со стяжкой и вертикальным элементом образуют щарнярный параллелограмм, в одном из положений которого, когда захват опущен на поверх«оеть контейнера, клещевины раскрыты, а в другом, когда захват поднят, -клещевины замкнуты.
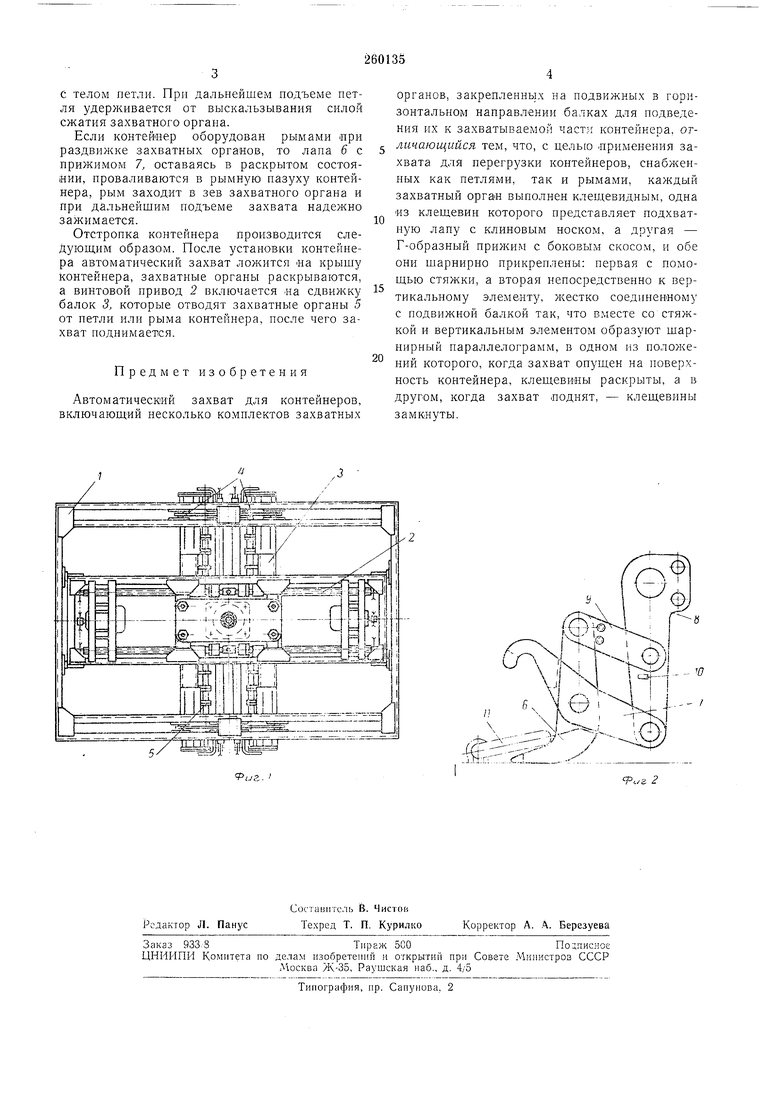
Па фиг. 1 изображен описываемый захват, вид сверху; на фиг. 2-захватный орган.
ретках 4. Па балках смонтированы четыре компле ста захватных органов 5.
Каждый захватный орган состопт из иодхватной лапы 6 с клиновым носком, Г-образного прижима 7 с боковым скосом, вертикального элемента 8 и стяжки 9. которые щарнирно соединены между собой так, что образуют гиарнирный параллелограмм.
В вертикальный элемент вмонтирован подпружиненный фиксатор W для удержания захватного органа в полуоткрытом положелии. При застройке контейнера автоматический захват опускается на крыщку контейнера, .при этом лапы 6 упираются в крыи1у. и захватные
opraiibi раскрываются Б положение, показанное на фиг. 2. Затех; включается винтовой привод 2 и, захватные органы скользят по крыще контейнера, оставаясь в раскрытом состоянии. При встрече с лежащей на крыще
петлей 11 лапы 6 приподнимают ее, и петля скользит по поверхности лапы до упора. Шаг расположения захватных органов выбирается таким, чтобы .при любых возможных в суигествующем парке контейнеров размерах петель
хоть одна лапа оказалась под петлей и подняла ее в раздвижки. При подъеме захвата прижи:, 7 опускается вниз, надежно фиксируя петлю в зажатом иоложении. Скосы на прижиме 7 обеспечивают некоторую сдвижс телом петли. При дальнейшем подъеме петля удерживается от выскальзывания силой сжатия захватного органа. Если контейНер оборудован рымами при раздвижке захватных органов, то лапа 6 с прижимом 7, оставаясь в раскрытом состоянии, проваливаются в рымную пазуху контейнера, рым заходит в зев захватного органа и при дальнейшим подъеме захвата надежно зажимается. Отстропка контейнера производится следуюш им образом. После установки контейнера автоматический захват ложится «а крышу контейнера, захватные органы раскрываются, а винтовой привод 2 включается «а сдвижку балок 3, которые отводят захватные органы 5 от петли или рыма контейнера, после чего захват поднимается. Предмет изобретения Автоматический захват для контейнеров, включающий несколько комплектов захватных органов, закрепленнь1х на подвижных в горизонтальном направлении балках для подведения их к захватываемой части контейнера, отличающийся тем, что, с целью применения захвата для перегрузки контейнеров, снабженных как петлями, так и рымами, каждый захватный орган выполнен клеп евидным, одна ИЗ клеш,евин которого представляет подхватную лапу с клиновым носком, а другая - Г-образный прижим с боковым скосом, и обе они шарнирно прикреплены: первая с помошью стяжки, а вторая непосредственно к вертикальному элементу, жестко соединенному с подвижной балкой так, что вместе со стяжкой и вертикальным элементом образуют шарнирный параллелограмм, в одном из положений которого, когда захват опушен на поверхность контейнера, клеш,евины раскрыты, а в другом, когда захват поднят, - клеш,евины замкнуты.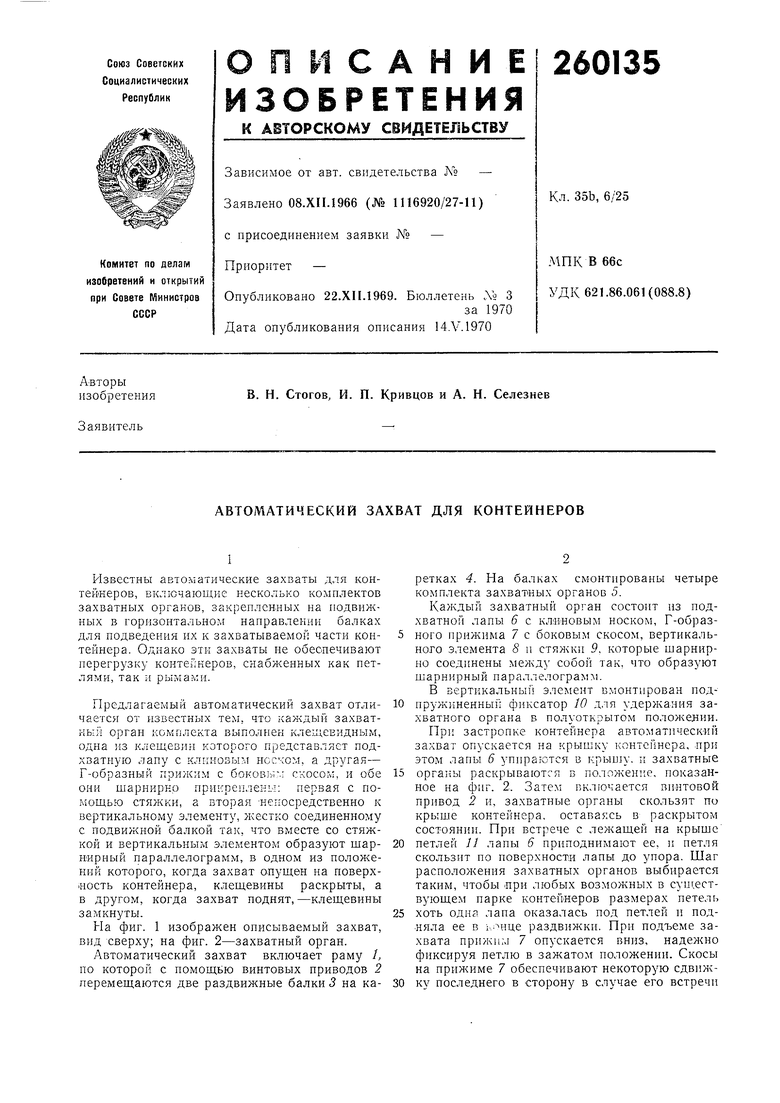
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ УНИВЕРСАЛЬНЫХ КОНТЕЙНЕРОВ | 1970 |
|
SU262351A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1985 |
|
SU1248933A1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 1970 |
|
SU275336A1 |
| Захват-кантователь | 1982 |
|
SU1052468A1 |
| Грузозахватное устройство | 1979 |
|
SU931648A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Грузозахватное устройство | 1988 |
|
SU1521694A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
,-р V ..
