(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
1
Изобретение относится к грузозахват устройствам, предназначенньтм, в частности, для перегрузки цилиндричес- ких изделий.
Известно грузозахватное устройство для цилиндрических изделий, содерясащее траверсу с установйенными на ней под углом в 12О друг к другу захватными рычагами, снабженными приводом l .
Однако это устройство предназначено только для одного типа изделий и не обладает необходимой универсальностью.
Наиболее близким к изобретению по технической сущности является грузозахватное устройство, содержащее траверсу, щарнирно установленные на ней посредством цапф с возможностью перемещения захватные органы и силовой привод с винтовой передачей для перемещения захватных органов 2 .
У известного устройства недостаточная надежность работы при захвате тяжелых вертикально установленных цилиндрических изделий.
Цель изобретения - повышение надежности работы при захвате вертикально расположенных цилиндрических изделий.
Поставленная цель достигается темр что траверса содержит три симметрично расположенные лучевые балки, а каждый захватный орган выполнен С,-образной формы и снабжен в нижней части лапой, установленной с возможностью повсфота вокруг вертикальной оси, а в верхней
to части - кронштейном с подпружиненным опорным роликом.
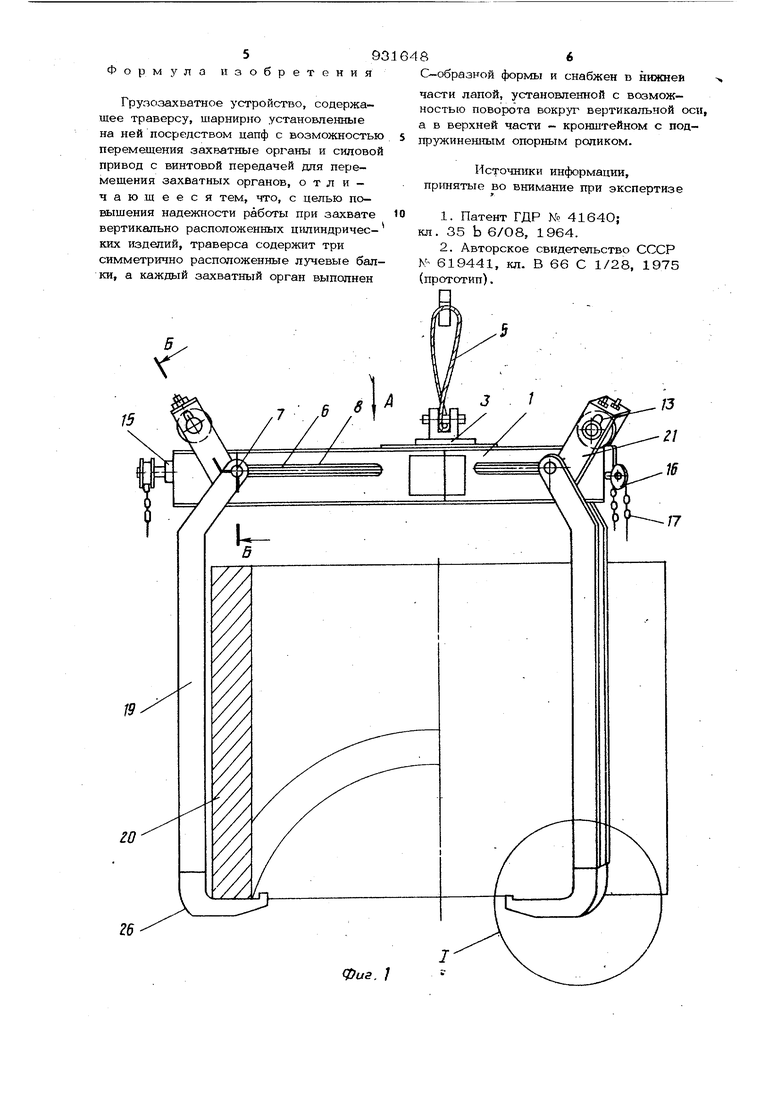
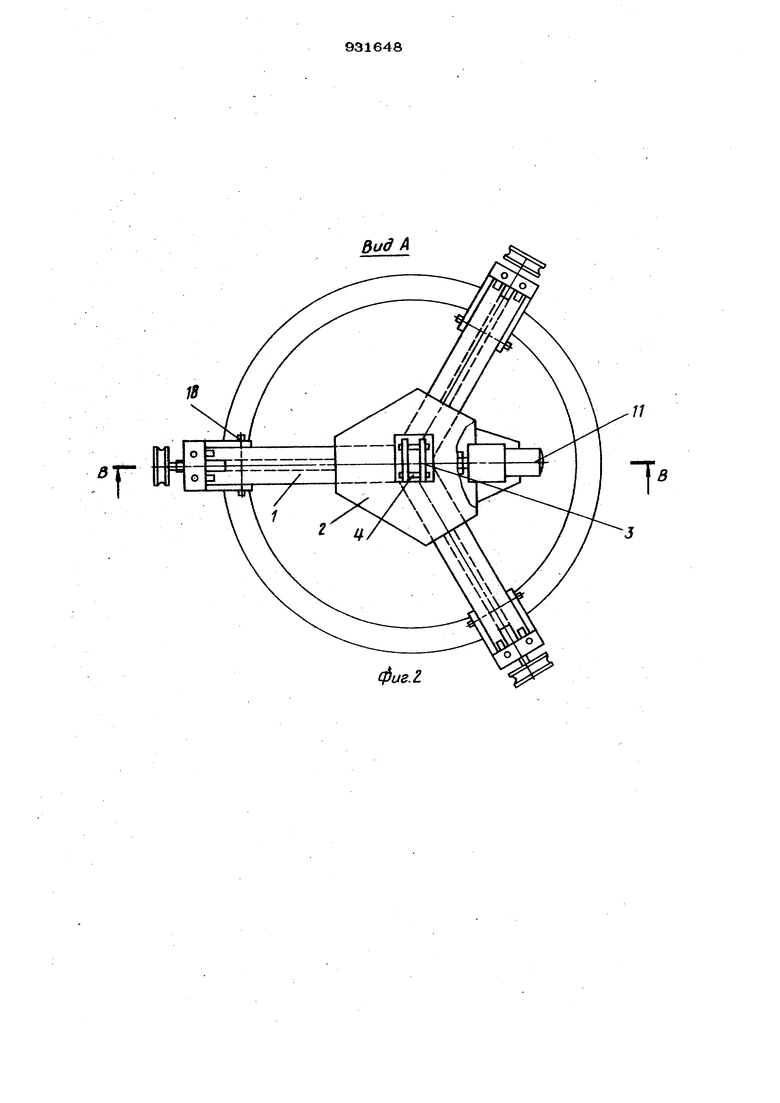
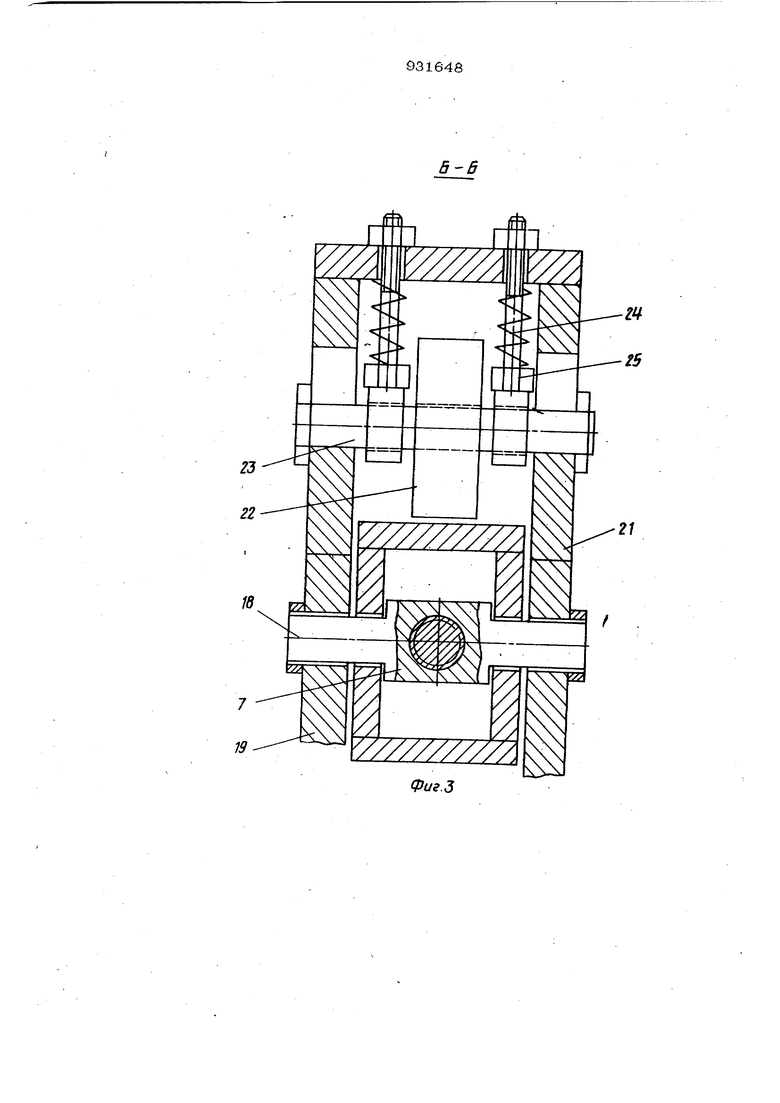
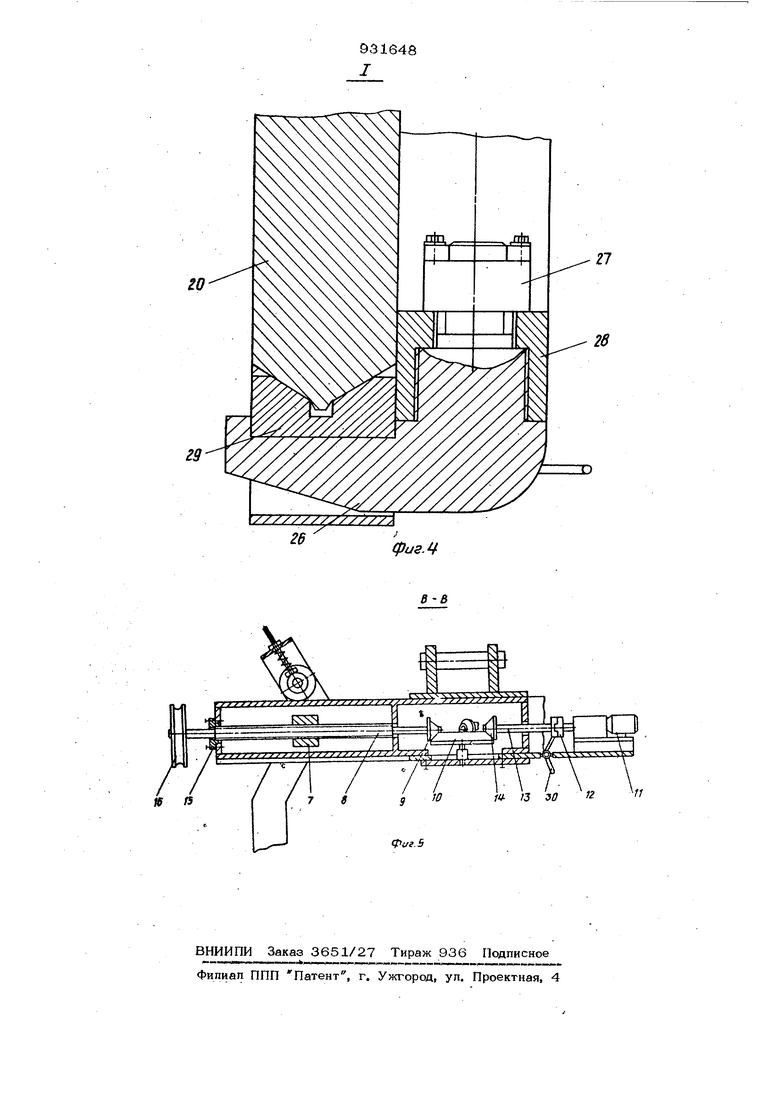
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б . 1} на
15 фиг. 4 - узел I на 4иг. 1; на фиг. 5 разрез В-В на фиг. 2.
Грузозахватное устройство содержит траверсу 1, представляющую собой три сходящиеся лучешле балки и выполненную
20 с сечением в виде короба. По центру балки траверсы скреплены стяжками 2, на одной из которых закретшен кронштейн 3 с осью 4 для крепления посредством стропа 5 к крюку грузоподъемного механизма. На боковых стенках траверсы 1 выполнены вырезы 6, нредставляющие собой направляющие для ползунов 7, установленных с возможностью перемещения по ходовым винтам 8. Последние (фиг. 5 saKpeiuieHbi внутри траверсы и имеют на одном конце коническую шестерню 9, входящую в зацепление с коническим колесом 1О, вращение которого осуществляется от мотор-редуктора 11, через муфту 12, промежуточный вал 13 и коническую щестерню 14. С другого корща ходовые винты закреплены во втулках 15и оканчиваются тяговым колесом 16с цепью 17. Каждый ходовой винт посажен на гайку ползуна 7. Последний по своим концам имеет цапфы 18, на которых щарнир закреплены захватные органы 19 для захвата изделия 20. При этом захватные оргашз выполнены С-образной формы и их точка подвески к траверсе и точка опоры изделия на лапах захватного органа находятся на одной линии, исключая момент сил, выворачивающий изделие, К захватным органам в верхней части приварены П-образные крошлтейны 21 механизма выравнивания, состоящего из опорного ролика 22, сидящего на оси 23 которая закреплена цапфами в отверстиях кронштейна 21. Ролик 22 поддрул инён пружинами 24 с гайкой 25 регулировки усилия пружины Нижняя часть захватного органа 19 снабжена поворотной подхватной лапой 26, оканчивающейся винтовой нарезкой, с помощью которой посредством гайки 27 она опирается на опорную поверхност подпятника 28. На лапе 26 предусмотре ны CMeifflbie подкпадки 29 для случая, если необхрдимо будет использовать уст ройство для изделий другого типоразмер например, днище или крыщка реактора (фиг. 4). Кроме того, одна из половин зубчато муфты 12 соединена с рычагом 30, поз воляющим отсоединять привод при перехо де на ручное управление захватными органами (фиг. 5). Устройство работает следующим обра зом. Для подъема и транспортирования изделия, например, корпуса реактора (весом до 60 т) устройство навещивают посредством петли 5 на крюк грузоподъемного механизма и подают к изделию 20, предварительно раздвинув лапы на диаметр больший изделия. Для этого включают привод мотор-редуктора 11. При этом коническая шестерня 14 вращает коническое колесо 10, а последнее входит в зацепление с шестернями 9, которые вращают ходовые винты 8, на которых установлены ползуны 7, несущие захватнью органы 19. Затем устройство опускают на изделие таким образом, чтобы оно было на ЗО50 мм ниже торцовой поверхности изделия. Включают мслор-редуктор 11 для сведения лап 26 захватного органа 19 до их упора в образующую обечайки изделия 2О. Производят окончательное центрирование лап 26 относительно изделия 20. При этом крошитейны 21 механизма выравнивания с помощью опорных роликов 22 перемещаются по верхней плоскости траверсы 1. В результате того, что захватные органы 19 выполнены С-образной формы, обеспечивается горизонтальное положение лап 26, так как лапы под действием веса захватного органа стремятся повернуться против движения захвата и выйти из горизонтального положения, а подпружиненные опорные ролики 22 удерживают их в горизонтальном положении. Опорный ролик снабжен пружинами 24, что дает возможность регулировать отклонение лап в пределах 2-3 от центра массы захватных органов. После окончательного Центрирования лап относительно изделия производят подъем изделия 20 и его транспортировку. После установкг изделия на опору устройство опускают и разводят захватные органы, включая привод мотор-редуктора 11. Для облегчения вывода захватного устройства из-под изделия предусмотрен поворот лап 26. Разведение и сведение пап можно осуществлять также вручную, посредством тяговой цепи 17 и тягового колеса 16 (фиг. 1). Использование изобретения позволяет за счет выполнения захватных органорычагов в виде С-образной формы, с возможностью перемещения по траверсе, осуществлять захват изделий с больщим диапазоном их размеров. Снабжение захватных органов выравнивающим механизмом, в сочетании с выполнением рычагов определенной формы, исключает момент сил, выворачивающий изделие, и тем самым повышает надежность работы. Формула изобретения Грузозахватное устройство, содержащее траверсу, шарнирно установленные на ней посредством цапф с возможностью перемещения захватные органы и силовой привод с винтовой передачей для перемещения захватных органов, о т л и - чающееся тем, что, с целью повышения надежности работы при захвате вертикально расположенных цилиндрических изделий, траверса содержит три симметрично расположенные лучевые балки, а каждый захватный орган выполнен Фиг. 9 8 С-образной формы и снабжен в нижней части лапой, установленной с возможностью поворота вокруг вертикальной оси, а в верхней части - кронштейном с подпружиненным опорным роликом. Источники информации, принятые во внимание при экспертизе 1.Патент ГДР № 4164О; кл. 35 b 6/О8, 1964. 2.Авторское свидетельство СССР К 619441, кл. В 66 С 1/28, 1975 (прототип). 1
Т
Вид А
Фиг2 I
