Предлагаемый автооператор относится к области нанесения гальванических покрытий, в частности к устройствам для обработки деталей на подвесках или в барабанах в автоматических и механизированных гальванических линиях.
Известен автооператор для гальванических линий, в дальнейшем - автооператор, включающий ходовую тележку с вертикальными направляющими, в которых размещена каретка, грузозахватный орган для подвесок или барабанов с обрабатываемыми изделиями с блоком, через который перекинут трос, связанный одним концом с приводным барабаном, и складывающийся подвес с подвижным элементом, закрепленный на ходовой тележке. Захват жестко смонтирован на каретке и снабжен ограничителем хода. Подвижный элемент связан со свободным концом троса и имеет упор с направляющей поверхностью, установленный с возможностью размещения направляющей поверхности в углублении ограничителя хода [1].
Недостатком этого автооператора является ограниченное перемещение грузозахватного органа в жидкостную ванну, обусловленное конструкцией складывающегося подвеса, который выполнен в виде телескопической штанги. Увеличить перемещение грузозахватного органа в жидкостную ванну можно, увеличив длину элементов телескопической штанги или увеличив количество элементов. При увеличении длины элементов телескопической штанги увеличиваются также габариты автооператора по высоте. При увеличении количества подвижных элементов телескопической штанги возрастает вероятность заклинивания ее элементов и, как следствие, снижается надежность работы автооператора. Изготовление телескопической штанги трудоемко, так как необходимо точное сопряжение ее подвижных элементов.
Известен автооператор, включающий ходовую тележку с вертикальными направляющими, в которых перемещается каретка с жестко закрепленными на ней ограничителями хода и грузозахватным органом с блоком, через который перекинут трос, связанный одним концом с приводным барабаном, а другим установлен на дополнительном блоке, основной и дополнительный упоры, взаимодействующие с ограничителями хода каретки и тележки, и приспособление для исключения колебаний дополнительного упора [2].
Недостатком известного автооператора является применение дополнительных звездочек и охватывающего их цепного контура, на котором смонтированы упоры и который является приспособлением для исключения колебаний дополнительного упора. Применение дополнительных элементов снижает надежность работы автооператора.
Автооператор включает ходовую тележку, каретку, грузозахватный орган с блоком, через который перекинут трос, соединенный одним концом с приводным барабаном, а другим концом установлен на дополнительном блоке [3].
Недостатками данного автооператора являются значительные габариты в вертикальном направлении, невозможность регулирования глубины опускания каретки в процессе работы, наличие металлического троса и вертикальных стоек.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является автооператор, включающий приводную тележку горизонтального перемещения с вертикальной стойкой, размещенную на ней каретку вертикального перемещения с грузозахватным органом, связанную с приводом через трособлочную систему, и механизм замедления скорости захватного органа [4].
Недостатками данного автооператора являются значительные габариты, наличие в конструкции металлического троса, высокая скорость ввода обрабатываемых изделий с подвеской в раствор ванн из-за малой величины пути замедления скорости. Увеличение зоны пути замедления приводит к еще большему увеличению габаритов автооператора и усложнению конструкции. Наличие в конструкции вертикальных направляющих стоек существенно ограничивает по длине и ширине габариты перемещаемых грузов, что является очень существенным недостатком. Кроме того, из-за наличия в конструкции жесткого упора, который взаимодействует с рычажной системой для уменьшения скорости опускания каретки, отсутствует возможность регулировать глубину опускания каретки в процессе работы автооператора. Этот автооператор принят за прототип.
Техническим результатом и задачей предлагаемого изобретения является разработка и создание автооператора для гальванической линии, обладающего компактной конструкцией, расширяющего технологические возможности и повышающего надежность в работе.
Это достигнуто за счет новых технических решений, находящихся в причинно-следственной связи с техническим результатом.
Решение поставленной задачи и достижение указанного технического результата осуществлено за счет того, что автооператор для гальванической линии, содержащий ходовую тележку с катками и привод для ее горизонтального перемещения, а также содержащий привод с барабаном и закрепленным на нем гибким элементом для вертикального перемещения каретки, несущей грузозахватный орган, согласно изобретению автооператор содержит складывающийся подвес, выполненный из попарно параллельных, взаимно расположенных балок в форме раздвижного параллелограмма.
Балки подвижно соединены между собой. Ходовая тележка и каретка содержат направляющие с перемещающимися в них ползунами. Ползуны подвижно соединены с балками. Подвес выполнен в форме секций, соединенных стяжками.
Гибкий элемент выполнен в форме подъемной ленты, например, из химстойкого полимерного материала. Лента перекинута через поддерживающие ролики, установленные на ходовой тележке, пропущена через петли, расположенные на каретке, и закреплена на ней.
Каретка содержит переставные упоры с возможностью взаимодействия с ползунами для их перемещения и регулировки тем самым по высоте нижнего положения каретки.
Определение прототипа как наиболее близкого аналога позволило выявить совокупность существенных по отношению к техническому результату признаков в заявленном автооператоре, которые изложены в формуле изобретения.
Следовательно, заявленное изобретение соответствует критерию «новизна» по действующему законодательству.
Результаты поиска показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку не выявлено предписываемых этим изобретением преобразований, характеризуемых отличительными от прототипа существенными признаками, направленными на достижение технического результата, поэтому предлагаемое техническое решение соответствует критерию «изобретательский уровень».
Перечень фигур.
На фиг.1 изображен общий вид предлагаемого автооператора в аксонометрии, схематично, штрихпунктирной линией показаны пути, по которым перемещается автооператор.
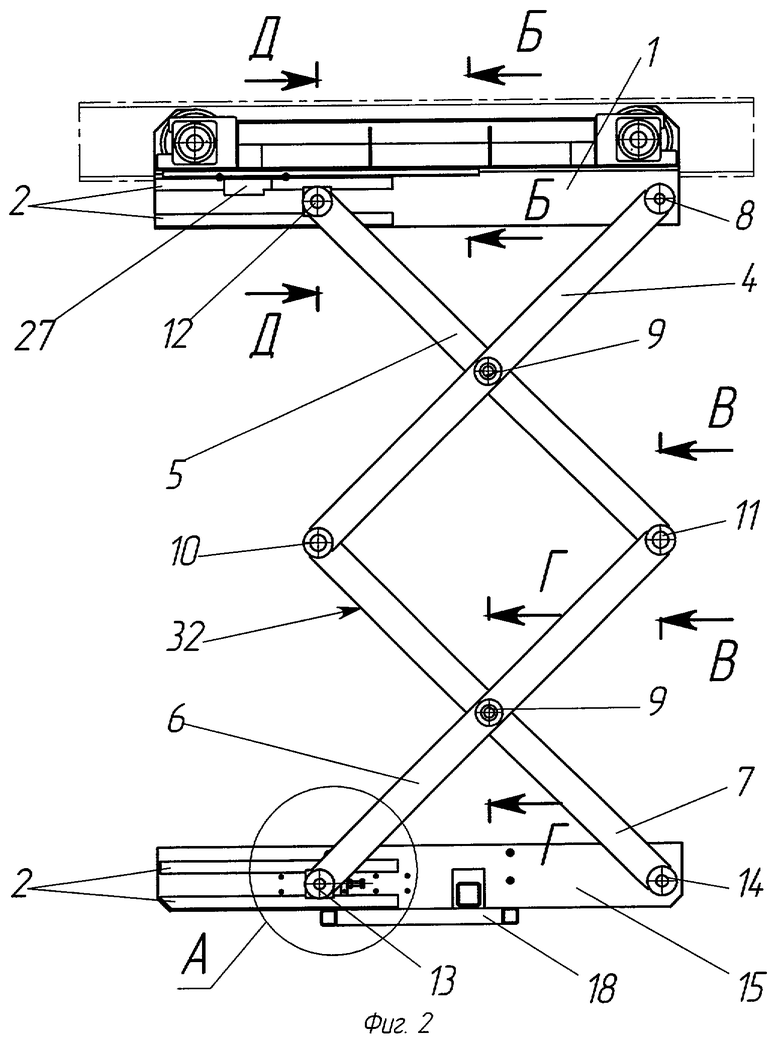
На фиг.2 - продольный разрез автооператора, схематично, штрихпунктирной линией показаны пути, по которым перемещается автооператор.
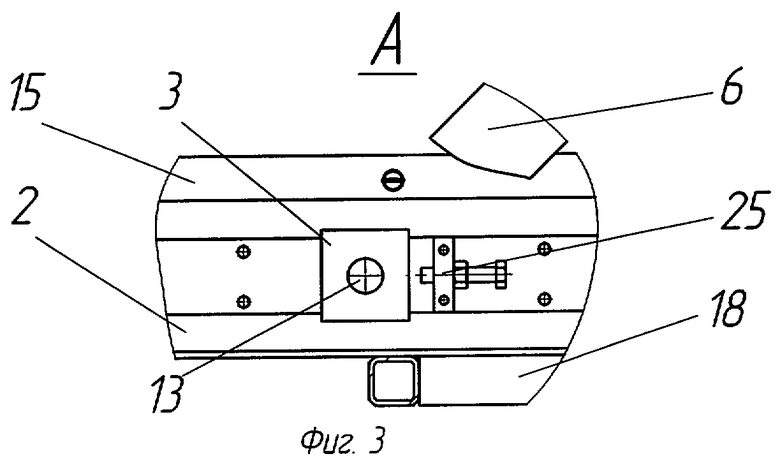
На фиг.3 - местный вид А на фиг.2, узел соединения балки 6 с ползуном 3, вид на переставной упор 25, увеличено, схематично.
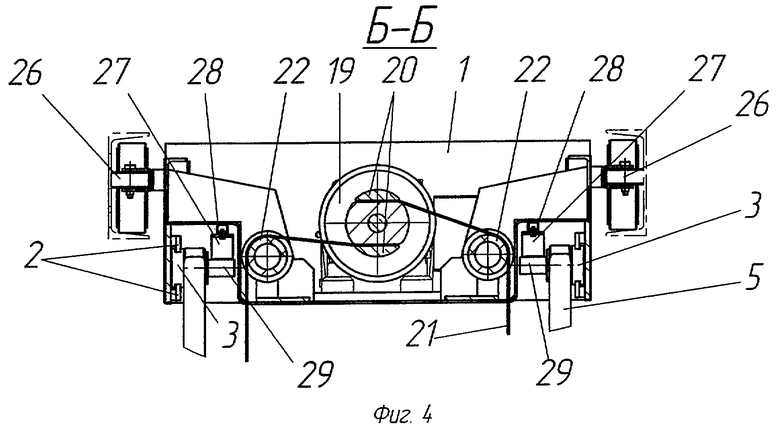
На фиг.4 - разрез Б-Б фиг.2, штрихпунктирной линией показаны пути, по которым перемещается автооператор.
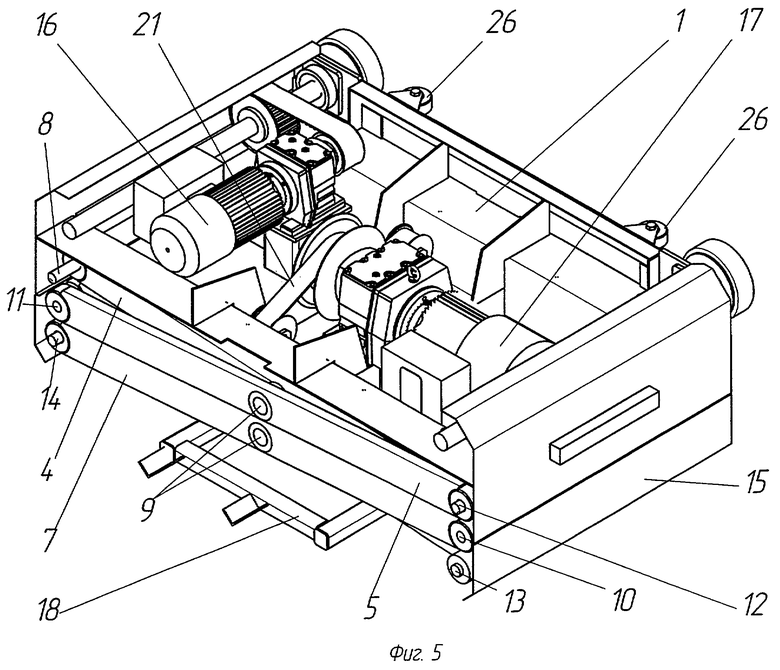
На фиг.5 - автооператор изображен в аксонометрии, повернутым вокруг оси симметрии на 90° по отношению к фиг.1, в сложенном состоянии, каретка 15 занимает верхнее положение, боковая стенка условно не изображена.
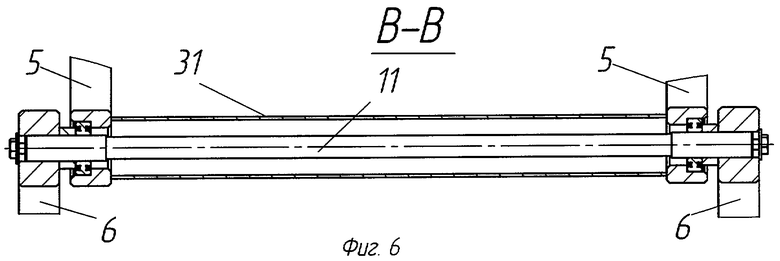
На фиг.6 - разрез В-В на фиг.2, увеличено.
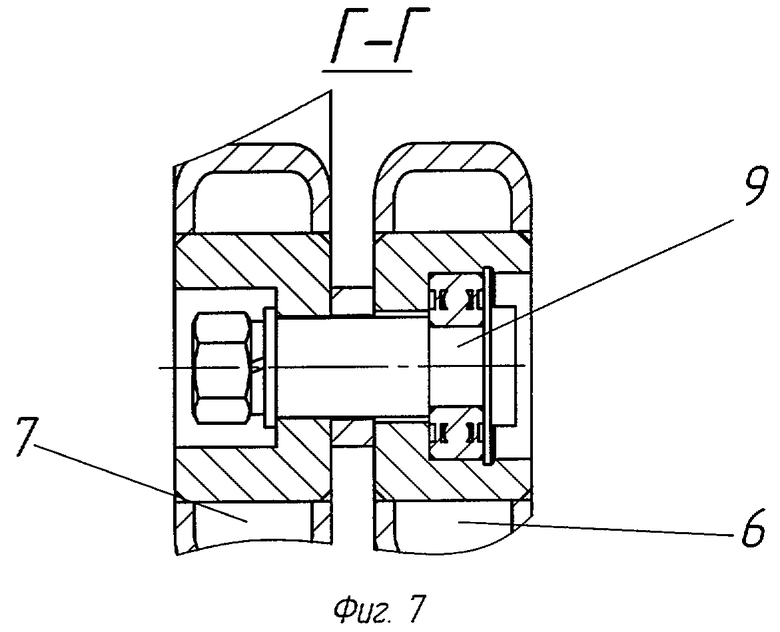
На фиг.7 - разрез Г-Г на фиг.2, увеличено.
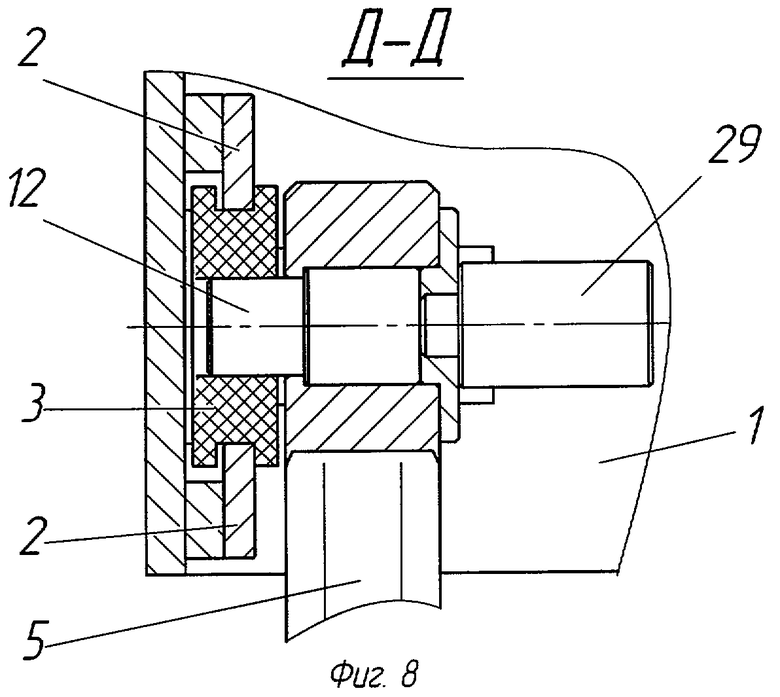
На фиг.8 - разрез Д-Д на фиг.2, увеличено.
Позиции на фигурах обозначают: 1 - ходовая тележка; 2 - направляющие; 3 - ползун; 4, 5, 6, 7 - балки подвеса; 8, 9, 10, 11, 12, 13, 14 - оси балок подвеса; 15 - каретка; 16 - привод продольного перемещения ходовой тележки; 17 - привод подъема-опускания каретки; 18 - грузозахватный орган; 19 - подъемный барабан; 20 - прижим; 21 - гибкий элемент, выполненный в форме подъемной ленты из химстойкого полимерного материала; 22 - поддерживающий ролик; 23 - петля; 24 - прижим; 25 - переставной упор нижнего положения каретки; 26 - направляющие ролики; 27 - бесконтактный датчик; 28 - рейка; 29 - контактный элемент; 30 - катки; 31 - стяжки; 32 - левая секция подвеса, 33 - правая секция подвеса.
Автооператор имеет следующее устройство.
Автооператор состоит из ходовой тележки 1 с катками 30 и каретки 15, соединенных складывающимся подвесом.
Далее - подвес. Подвес состоит из балок 4, 5, 6, 7, подвижно соединенных между собой осями. Балки 4 установлены на оси 8 (фиг.5, 2), неподвижно закрепленной в тележке 1, и соединены с балками 5 осями 9 (фиг.1, 2), а с балками 7 осью 10 (фиг.1, 2).
Балки 5 соединены с балками 6 осью 11 (фиг.6), а с ползунами 3 осями 12 (фиг.8). В свою очередь балки 6 соединены с балками 7 осями 9 (фиг.7) и с ползунами каретки 15 осью 13 (фиг.3). Ось 14 соединяет каретку 15 с балками 7 и неподвижно закреплена в каретке 15. Конструктивно оси 8, 10, 11, 13, 14 одинаковы и отличаются только по длине.
Балки попарно параллельны и взаимно расположены в форме раздвижного параллелограмма. Так, балки 4 и 6 взаимно параллельны, как и балки 5 и 7. Подвес выполнен в форме одинаковых по конструкции секций, левой секции 32 (фиг.2), правой секции 33 (фиг.1). Секции соединены стяжками 31 и осями 8, 10, 11, 13, 14 проходящими внутри стяжек. Каждая секция состоит из балок 4, 5, 6, 7. Подвес подвижно соединен с ходовой тележкой 1 и с кареткой 15 осями 8, 12, 13, 14.
Тележка и каретка содержат по две пары направляющих 2 с ползунами 3. Ползуны соединены с балками 5, 6 осями 12, 13. Каретка содержит переставные упоры 25, установленные с возможностью взаимодействия с ползунами 3. Упорами 25 устанавливают нижнее положение каретки перед началом работы.
Этим достигнуты технические результат и задача расширения технологических возможностей предложенного автооператора, так как в приведенных аналогах [1, 2, 3, 4] подобного технического решения подвеса нет.
Отсутствуют ограничения по длине и ширине перемещаемых грузов, так как в заявленном изобретении отсутствуют вертикальные направляющие.
На тележке 1 смонтирован привод 16 продольного перемещения и привод 17 подъема-опускания каретки 15 с грузозахватным органом 18. На приводе подъема-опускания 17 установлен подъемный барабан 19, в котором прижимами 20 закреплены два конца подъемной ленты 21. Подъемная лента 21 для предотвращения перетирания о металлические конструкции пропущена через поддерживающие ролики 22, установленные на тележке 1, и через петли 23, установленные на каретке 15. Для исключения перемещения ленты 21 относительно петель 23, что может вызвать перекос в подвесе, указанная лента закреплена на каретке 15 прижимом 24.
Выполнение гибкого элемента 21 в форме подъемной ленты из химстойкого полимерного материала в приводе 17, а не троса как в аналогах [1, 2, 3] и прототипе [4] достигнут технический результат, заключающийся в повышении надежности, так как сокращаются аварийные ситуации, ремонтные и профилактические работы.
Для обеспечения прямолинейного движения в конструкции ходовой тележки 1 установлены направляющие ролики 26.
Для отключения привода подъема-опускания 17 в крайнем нижнем и крайнем верхнем положениях каретки 15 установлены электронные бесконтактные датчики 27 на рейке 28 с возможностью регулировки положения. Датчики 27 во время работы взаимодействуют с контактными элементами 29, жестко закрепленными на балках 5. Для останова каретки 15 в промежуточных положениях возможна установка дополнительных датчиков. Электронные бесконтактные датчики 27 электрически связаны с электронной системой управления, условно не показанной.
Автооператор работает следующим образом.
Перемещением ходовой тележки 1 с катками 30 автооператор подводят к нужной позиции, условно не показано. Включением привода подъема-опускания 17 на наматывание подъемной ленты 21 на барабан 19 начинается движение каретки 15 вверх, при этом грузозахватный орган 18 захватывает подвеску или барабан с обрабатываемыми деталями, условно не показаны. В процессе перемещения каретки 15 вверх происходит одновременный поворот балок 4 на оси 8, установленной в тележке 1, и балок 7 на оси 14, установленной в каретке 15, и на общей оси 10. При этом балки 5, соединенные с балками 4 осями 9, и балки 6, соединенные с балками 7 осями 9 и соединенные с балками 5 осью 11, совершают сложное вращательно-поступательное движение. Это движение передается ползунам 3, перемещающимся по направляющим 2, расположенным на тележке 1 и каретке 15, преобразовывая таким образом вертикальное перемещение каретки 15 в горизонтальное движение ползунов 3.
Таким образом, при подъеме или опускании каретки 15 балки 4 и 6, 5 и 7, поворачиваясь на осях, остаются попарно параллельными, взаимно расположенными в форме раздвижного параллелограмма.
При прохождении контактного элемента 29, неподвижно закрепленного на балке 5, мимо датчика 27 с последнего поступает сигнал в систему управления, условно не показана. Система управления после обработки сигнала посылает команду остановки на привод подъема-опускания 17, и каретка 15 останавливается в нужном положении.
Необходимая скорость выхода барабана или подвески с деталями из ванны, условно не показаны, скорость рабочего хода каретки 15, скорость замедления каретки 15 перед остановкой, а также время, в течение которого действуют величины этих скоростей, устанавливают регулятором частоты, встроенным в привод подъема-опускания 17. Диапазон изменения скоростей определен конструкцией привода, условно не показано.
Предлагаемое техническое решение позволяет.
Расширить технологические возможности автооператора за счет:
- уменьшения габаритов конструкции при верхнем положении каретки, что позволяет устанавливать более высокие перегородки между ваннами,
- использования принципа модульной конструкции, что позволяет на базе одного автооператора путем добавления еще одного комплекта балок получить автооператор с большей глубиной опускания каретки,
- отсутствия жестких ограничений по длине и ширине перемещаемых грузов так, как в автооператоре отсутствуют вертикальные направляющие,
- использования автооператора в линиях нанесения лакокрасочных покрытий и линиях по транспортировке изделий,
- повысить надежность и долговечность автооператора за счет использования в конструкции подъемной ленты из химстойкого полимерного материала, что уменьшает аварийные ситуации, ремонтные и профилактические работы.
Таким образом, вышеизложенные сведения свидетельствуют о возможности использования автооператора в том виде, как он охарактеризован в формуле изобретения с помощью вышеописанных в заявке известных и предлагаемых средств. Следовательно, заявленный автооператор соответствует требованию «промышленно применим по действующему законодательству». По предлагаемому автооператору разработана конструкторская и технологическая документация.
Изготовлен и испытан опытный образец. Испытания дали положительный результат.
Источники информации
1. Авторское свидетельство СССР № 952703, кл. B65G 49/02, 1980 г.
2. Авторское свидетельство СССР № 1004230, кл. B65G 49/02, 1981 г.
3. Авторское свидетельство СССР № 1138369, кл. B65G 49/02, 1983 г.
4. Авторское свидетельство СССР № 715408, кл. B65G 49/02, 1978 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических линий | 1983 |
|
SU1138369A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Автооператор для гальванических линий | 1981 |
|
SU1004230A1 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |
| Автоматическая траверса | 2020 |
|
RU2749677C1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| МОНОРЕЛЬСОВАЯ КРАН-БАЛКА | 1990 |
|
RU2006446C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
Автооператор содержит ходовую тележку (1) с катками, привод для ее горизонтального перемещения (16), привод (17) с барабаном и закрепленным на нем гибким элементом (21) для вертикального перемещения каретки (15), несущей грузозахватный орган (18), и складывающийся подвес. Подвес выполнен из соединенных стяжками (31) попарно параллельных балок (4, 5, 6, 7) в форме раздвижного параллелограмма. Ходовая тележка и каретка содержат направляющие с ползунами, подвижно соединенных с балками. Гибкий элемент перекинут через поддерживающие ролики на ходовой тележке, пропущен через петли, расположенные на каретке, и закреплен на ней прижимом. Обеспечивается компактная конструкция, расширение технологических возможностей и повышение надежности в работе автооператора. 8 ил.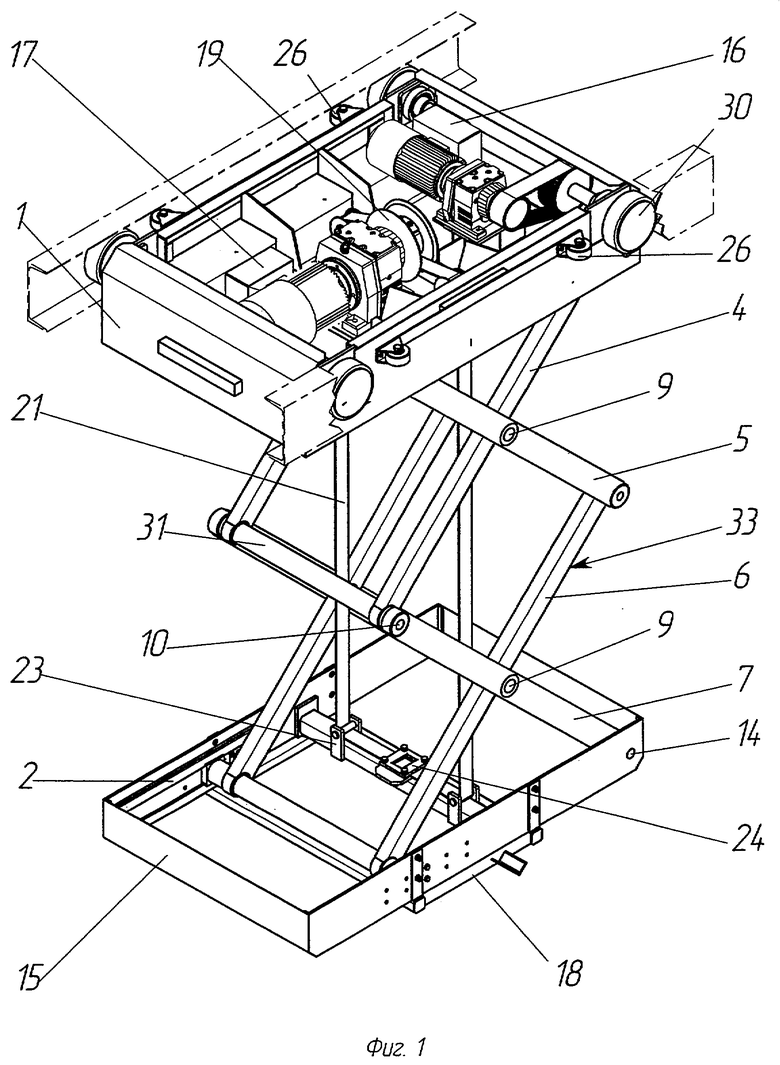
Автооператор для гальванической линии, содержащий ходовую тележку с катками и привод для ее горизонтального перемещения, а также содержащий привод с барабаном и закрепленным на нем гибким элементом для вертикального перемещения каретки, несущей грузозахватный орган, при этом он включает складывающийся подвес, выполненный из попарно параллельных, взаимно расположенных балок в форме раздвижного параллелограмма, балки подвижно соединены между собой, ходовая тележка и каретка содержат направляющие с ползунами, ползуны подвижно соединены с балками, складывающийся подвес выполнен в форме секций, соединенных стяжками, отличающийся тем, что указанный гибкий элемент перекинут через поддерживающие ролики на ходовой тележке, пропущен через петли, расположенные на каретке, и закреплен на ней прижимом.
| Автооператор для гальванических линий | 1978 |
|
SU715408A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО С ПОДНИМАЕМОЙ/ОПУСКАЕМОЙ ПЛАТФОРМОЙ | 2005 |
|
RU2337872C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО С ПОДНИМАЮЩИМСЯ/ОПУСКАЮЩИМСЯ СТОЛОМ, НЕСУЩИМ ТРАНСПОРТИРУЕМЫЕ ОБЪЕКТЫ | 2005 |
|
RU2337843C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО НЕСУЩЕГО ТИПА | 2006 |
|
RU2373089C1 |
| Автооператор для гальванических линий | 1981 |
|
SU1004230A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952703A1 |
| Автооператор для гальванических линий | 1980 |
|
SU908716A1 |

