Данное изобретение относится к Областн неразрушаемого контроля материалов.
Известны устройства сканирования датчиков при контроле труб, состоящие из каретки с опорными роликами и -механизма сканирования с датчиками.
iB предлагаемом устройстве механизм сканирования выполнен в виде несущей датчики планшайбы с -проходным отверстием для контролируемого проката, имеющей зубчатый венец, и кинематически связанного с ним (например, конической передачей) мультипликатора, установленного на каретке, а на входном валу мультипликатора расположен прижимной -фрикционный ролик, служащий приводом механизма сканирования.
Лрижямной ролик, взаимодействующий с контролируемым прокатом, подсоединяется к счетчику и указывает длину проката.
Это обеспечивает постоянство шага сканирования при неравномерной скорости движения контролируемого изделия -и, следовательно, повышает надежность контроля.
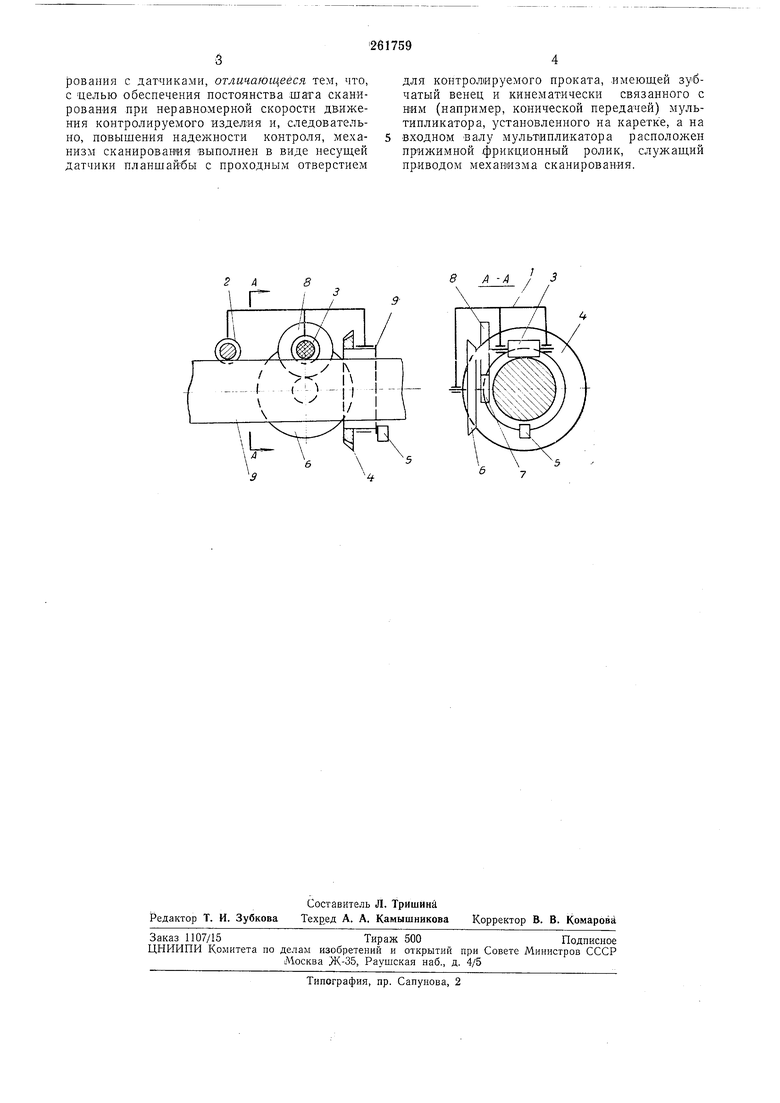
На чертеже показано -предлагаемое устройство.
Оно содержит каретку / с опорным роликом 2 и фрикционным роликом 3, механизм сканирования, выполненный в виде планшайбы 4, несущей датчик 5 и имеющей конический зубчатый венец, и мультипликатор.
состоящий из конической щестерни 6, щестерен 7м 8. На валу последней закреплен фрикдионный ролик 3. Планшайба имеет проходное отверстие для контролируемого проката 9. 5 Устройство работает следующим образом.
При перемещении его относительно проката фрикционный ролик .катится по поверхности проката 9. Ролик через шестерни 7, 8 мульт1ипликатора двигает коническую шестерню 6,
0 связанную с коническим венцом планшайбы, несущей датчик 5. Планшайба 4 вращается со скоростью, определяемой передаточным числом мультипликатора, обеспечивая сканирование датчиком поверхности контролируемого
5 проката.
Каждому угловому перемещению фр1икционного ролика соответствует определенное угловое перемещение планшайбы с датчиком. Таким образом, при изменении скорости
0 движения устройства относительно контролируемого проката кинематическая связь ролика с планшайбой обеспечивает контроль проката -по спирали с постоянным шагом.
25
Пред1мет изобретения
рования с датчиками, отличающееся тем, что, с щелью обеспечения постоянства шага сканирования при неравномерной скорости движения контролируемого изделия и, следовательно, повышения надежности контроля, механизм сканирования выполнен в виде несущей датчики планшайбы с проходным отверстием
для контролируемого проката, имеюшей зубчатый венец и кинематически связанного с ним (например, конической передачей) мультипликатора, установленного на каретке, а на входном валу мультипликатора расположен прижимной фрикционный ролик, служаш,ий приводом механизма сканирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАШТНО-ТЕХППНЕШЯБИБЛИОТЕКАНаучно-исследовательский и опытно-конструкторский институт автоматизации черной металлургии | 1972 |
|
SU349938A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ЗАГОТОВОК ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1993 |
|
RU2065833C1 |
| Полуавтомат для закладки клиньев в пазы статора электрической машины | 1984 |
|
SU1354349A1 |
| Плансуппортная головка с программным управлением | 1989 |
|
SU1704944A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| Устройство для комплексного контроля конических зубчатых колес | 1980 |
|
SU937985A1 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| Автоматическая поточная линия для наплавки фасонных дисков | 1988 |
|
SU1544543A1 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| Устройство для намотки трубчатых изделий | 1985 |
|
SU1391927A1 |
2 А
