Данное изобретение относится к области тОКоприемников на электроподвижном составе железных дорог.
На электрифицированных л елезных дорогах Советского Союза наименьшая высота подвески :контактного нровода воздушной контактной сети установлена 5750 мм на перегонах и 6250 мм на станциях. В исключительных случаях это расстояние в пределах существующих искусственных сооружений с разрешения МПС может быть до 5550 мм на линиях постоянного тока и до 5675 мм на линиях переменного тока. Высота лодвески ко 1тактного ировода не должна быть более 6800 мм.
Такие вертикальные габариты подвески контактных проводов вызвали необ.ходимость применения нантографов электроподвижного состава, имеющих рабочий диапазон 1500 мм (т. е. изменение положения полоза по высоте от 5400 до 6900 мм над уровнем головок рельсов).
Столь большая величина рабочего диапазона обусловила значительные размеры лодвижных рам пантографов н, следовательно, большой их вес. Приведенная масса двухнолозНых пантографов достигает 4,8 кг-сек /м.
подвески контактного провода, так как приведимшая масса их довольно больншя.
Предлагаемое устройство обеспечивает хорои ий токосъем при высоких скоростях движения путем уменьшения приведенной массы токоприемника. Это достигается тем, что пантограф снабжен дополнительным подвижным основанием, установленным на неподвижном основании токоприемника. Подвижные рамы нантографа расположены на подвижном осно.вамип. Рычажная система, связывающая подвижное и неподвижное основания соединена со штокамн пневмонИоТиндрОВ, осуществляющих автоматический подъем и опускание подвижного основания в зависимости от высотного ноложения подвижных рам.
Предлагаемый пантограф позволяет существенно уменьшать длину подвижных рам, что и обеспечивает такое снижение приведенной массы, которое не может быть достнгнуто никакими иными способами.
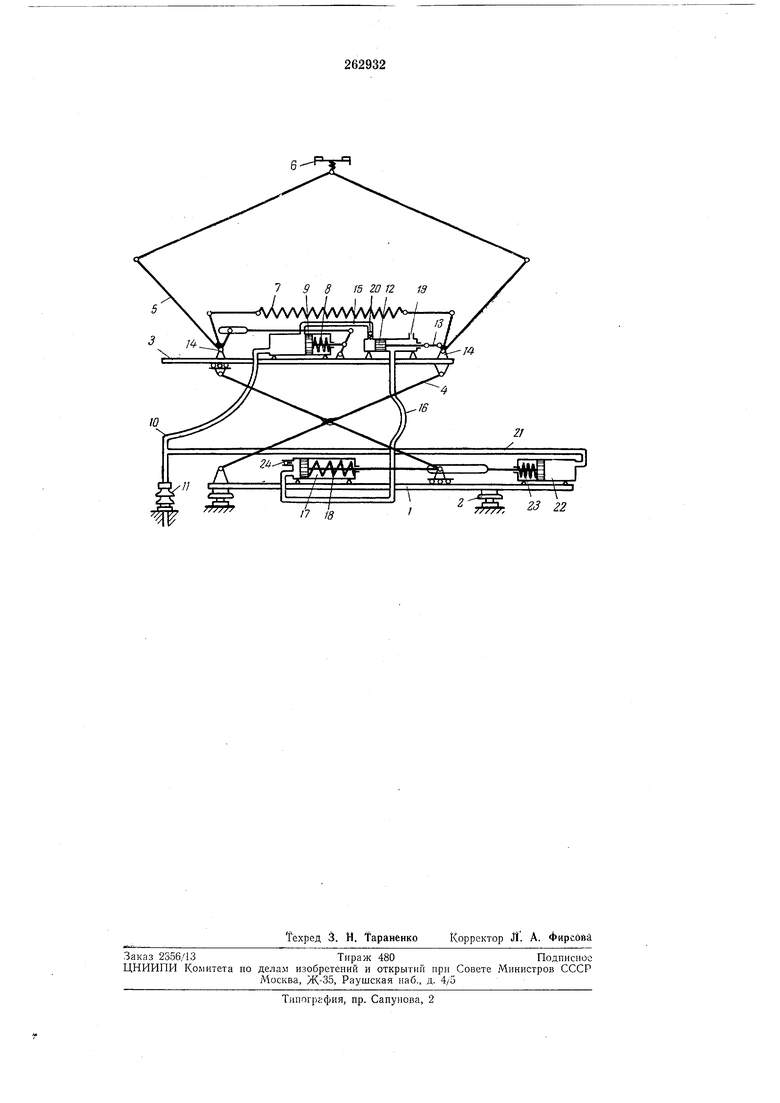
На чертеже представлена принципиальная схема предлагаемого пантографа.
Основными несущими конструкциями являются неиотвнжное основание 1, установленное на крыше электроподвижного состава на изоляторах 2, подвижное основанне 3 и соединяюн ;ая эти основания система 4. На подвижном основании закреилены подшипники главных валов подвилхных рам 5, в верхней части которых расположен полоз 6, осуществляющий контакт с проводом контактной сети.
Необходимое статическое нажатие пантографа создается подъемными пружинами 7. Подвижные рамы опускаются под действием опускающей пружины 8, которая может переместить поршень 9 рабочего цилиндра только в том случае, если из него по шлангу 10 выпущен воздух. Цилиндр 11 шлангом через проходной изолятор соединен с электропневгматическим клапаном управления .пантографом.
.При .работе токолриемника на участке контактной сети с небольшим изменением высоты колтактного провода подвижное основание 3 остается на одном уровне.
При значительных перепадах высогы провода, например при подходе к искусственным сооружениям,- высота подв.ижного основания изменяется.
Высота .подвижного основания .изменяется автоматически .в зависимости от положения поршня золотника 12, связанного щатуном 13 с кривошипом, установленным на главном валу подвижных рам 14.
При опускании подв.ижных рам 5 относительно основания 3, что происходит вследствие опускания контактного провода, поршень золотника, перемещаясь вправо, соединяет воздухопро.воды 15 .и 16, в результате чего воздух (при условии наличия его в рабочем цилиндре) попадет в цилиндр 17, установленный на неподвижном основании. Поступающий в цилиндр воздух переместит поршень вправо, сжимая подъемную прул{ину 18, и подвижное основание 3 опустится. Оно будет опускаться до тех пор, пока поршень золотника, передвигающегося влево, не нерекроет отверстие воздухопровода 16. При последующем подъеме полоза относительно подвижного основания поршень золотника, продолжая движение влево, откроет отверстие воздухопровода 16 таким образом, что воздухопровод окажется соединенным с атмосферой через отверстие 19. В результате воздух из цилиндра 17 выходит в атмосферу, и подвижное основание под действием подъемной пружины 18 поднимается.
Для предотвращения выхода воздуха из цилиндра 17 через рабочий цилиндр в том случае, когда производится опускание пантографа при опущенном положении подвижного основания, в воздухопроводе 15 возле золотника монтируется обратный клапан 20.
Золотник регулируется таким образом, чтобы воздухопроводы 15 и 16 соединялись при опускании полоза 6 до положения, когда он не доходит на 150 мм до своего крайнего нижнего положения относительно подвижного основания 3. Воздухопровод 16 соединяется с атмосферой, когда полоз не доходит на 150 мм до своего наивысщего относительно подвижного основания положения.
У неработающего пантографа подвижные рамы и подвижное основание находятся в опущенном состоянии, так как воздух по трубопроводу 21 выходит из цилипдра 22. Это происходит одновременно с выходом воздуха из цилиндра после нажатия машинистом кнопки опускания пантографа, вследствие чего опускающая пружина 23, более сильная, чем пружина 18, опускает подвижное основание 3. Для того чтобы исключить при этом противодействие разреженного пространства, на цилиндре 17 установлен обратный клапан 24, обеспечивающий свободный вход воздуха в цилиндр из атмосферы при движении порщня вправо. Таким образом, в предлагаемом устройстве габариты подвижных рам значительно меньше по сравнению с существующими токоприемниками, что уменьщает приведенную массу токоприемника и улучшает токосъем при скоростном движении электроподвижного состава.
Предмет изобретения
Пантограф электроподвижного состава железных дорог, содержащий неподвижное основание, закрепленное на изоляторах, подвижные рамы с контактным элементом и механизм подъема и опускания с пружиной и пневмоприводом, отличающийся тем, что, с целью уменьшения приведенной массы токоприемника, подвижпые рамы расположены на дополнительном подвижном основании, связанном с неподвижным основанием рычажной системы, например ножничной, которая соединена со штоками пневмоцилиндров, установленных на неподвижном основании и осушествляющих подъем и опускапие подвижного основания в зависимости от положения подвижных рам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник электроподвижного состава | 1974 |
|
SU500091A1 |
| ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА С АВТОМАТИЧЕСКИМ АВАРИЙНЫМОПУСКАНИЕМ | 1973 |
|
SU431045A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ИСПЫТАНИЙ ТОКОПРИЕМНИКОВ | 2002 |
|
RU2222794C2 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ | 1970 |
|
SU284013A1 |
| ТОКОПРИЕМНИК | 2003 |
|
RU2235650C1 |
| ТОКОПРИЕМНИК | 2003 |
|
RU2321508C1 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| ПАНТОГРАФ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ | 1969 |
|
SU243655A1 |
| Токоприемник для транспортного средства | 1985 |
|
SU1283127A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО СКЛАДЫВАНИЯ ТОКОПРИЕМНИКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПРИ АВАРИЙНОМ РЕЖИМЕ ТОКОСЪЕМА И ТОКОПРИЕМНИК | 2021 |
|
RU2753770C1 |