(54) ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство аварийного опускания токоприемника | 1986 |
|
SU1369940A1 |
| Токоприемник для токосъема с токопроводящего рельса | 1980 |
|
SU969564A1 |
| ПАНТОГРАФ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1970 |
|
SU262932A1 |
| ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА С АВТОМАТИЧЕСКИМ АВАРИЙНЫМОПУСКАНИЕМ | 1973 |
|
SU431045A1 |
| Токоприемник для транспортного средства | 1985 |
|
SU1283127A1 |
| Токоприемник транспортного средства | 1987 |
|
SU1463542A1 |
| ПРИВОД ТОКОПРИЕМНИКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1972 |
|
SU335130A1 |
| Привод токоприемника электроподвижного состава | 1976 |
|
SU629093A1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| Автоматический воздушный однопроводной тормоз | 1925 |
|
SU20129A1 |
1
Известны токоприемники электроподвижного состава, содержащие верхние и нижние рамы, пневматически связанные между собой посредством золотника, пне&матический цилиндр, кулису, связанную с верзшими подвижными рамами, опускаюище пружины верхних и нижних подвижных рам и и тягу.
Цель изобретения - повышение надежно сти работы.
Это достигается тем, что в предлагает мом токоприемнике шток пневматического цилиндра соединен с нижними и верхними подвижными рамами .псюредством двуплечего рычага, ОДИН; которого соединен тягой с нйжнййи -Подвйш1б11у1и. рамами и их опускающей пружиной а другой связан через кулису с.;верхними подвижнь1ми рамами и непосредственно с их опускающей Пружиной, причем кулиса в рабочем положении токоприемника зафиксирована упором.
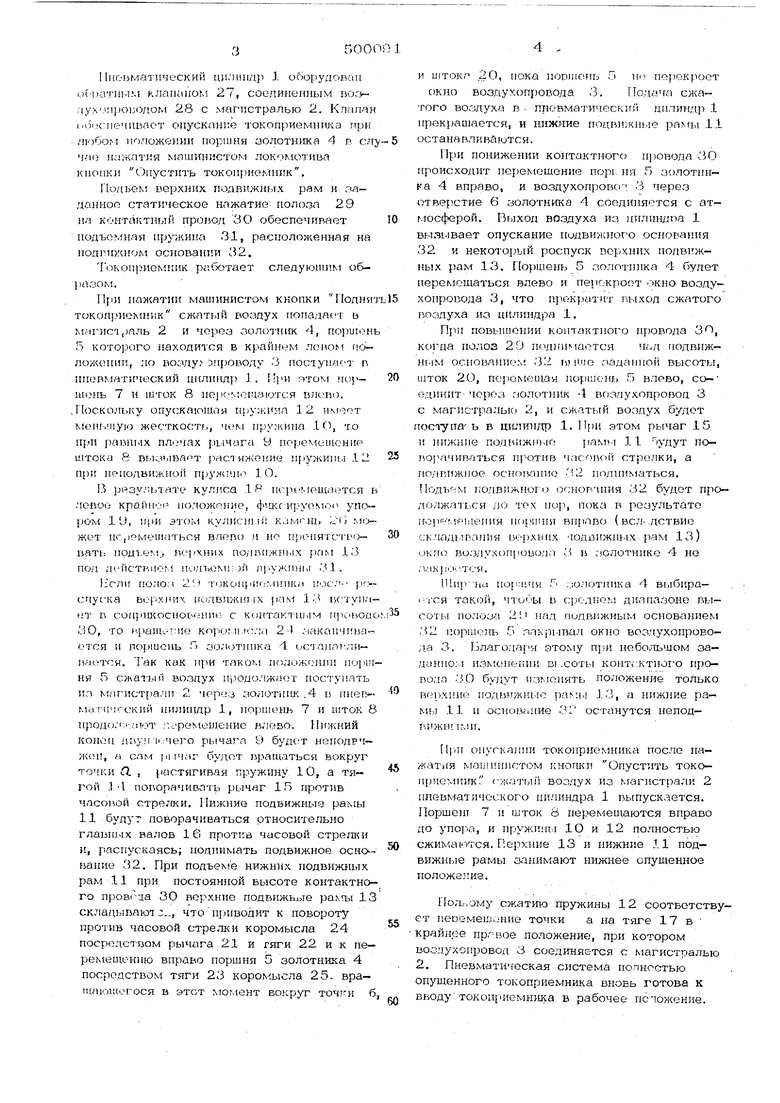
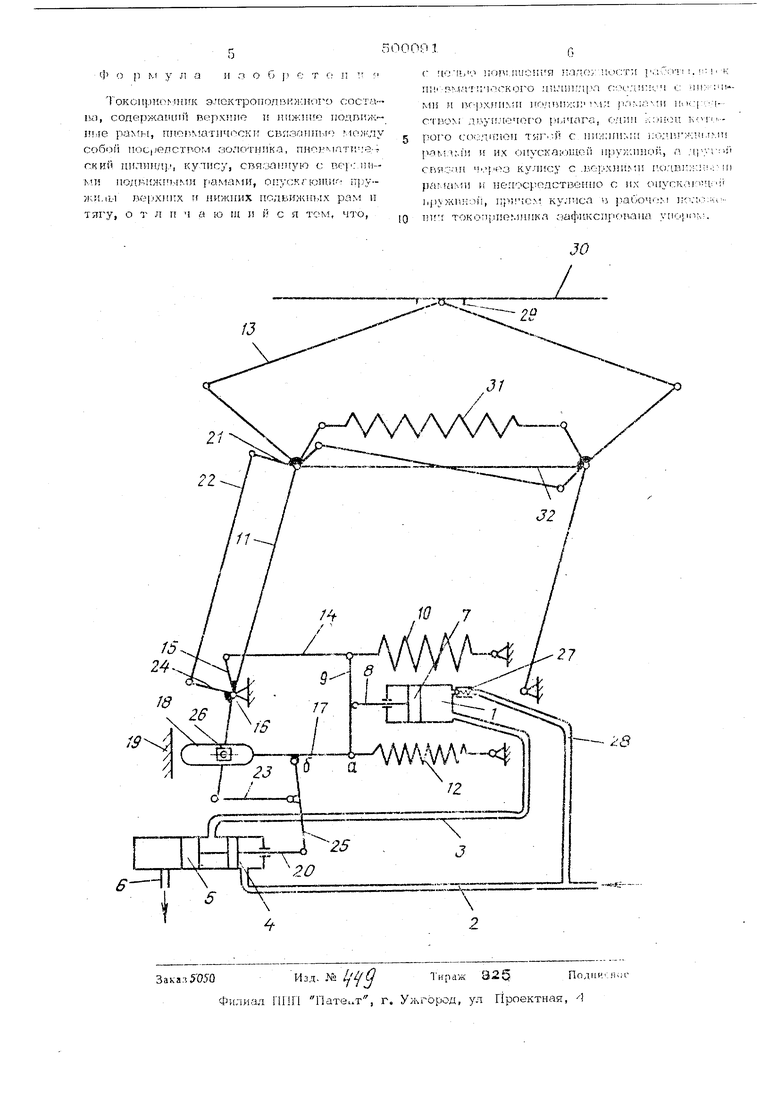
На чертеже изображена принципиальная схема токоприемника.
Токоприемник содержит призматический цилиндр 1, получающий питание от магистр а
ли 2 сжатого воздуха .-по воздухопроводу 3 через золотник 4, когда его поршень 5 находится в левом положении. Когда пор шень 5 находится в правом положении, пневматический цилиндр 1 соединяется с атмосферой через отверстие 6 золотника 4,
ПорЩень 7 посредс| вом штока 8 соединен с двуплечим рычагом 9, один конец которого связан с опускающей пружиной 10 нижних подвижных рам 11, а другой - с опускающей пруж1Ш.ой 12 верхних подвижн ных рам 13.
Верхний конец двуплечего рычага 9 тягой 14 соединен с рь1чагом 15, закреплен ным на главном валу 16 нижних подвижных рам 11. Пружина 12 связана тягой 17 с кулисой 18, крайнее положение которой ограничивается упором 19.
Шток 2О золотника 4 посредством рычага 21, тяг 22, 23 и коромысел 24, 25 соединен с верхними рамами 13. На одном пдаче коромысла 24 находится куодоHbiF камень 26,-а коромысло 25 соединено
с Т51ГОЙ 17. Плоиматический цилиндр .1. оборудован о(()ати1.и- клапаном 27, соелинеииь1м вог /чул/ПрОБОдом 28 с магистралью 2. Клапан (.01к:печнваот С)пускаиие токоприемштка при . положении nopiunH аолотника 4 в сп чло нажатия мяшинистом локомотива Опустить токоприемник, Подъем верхних подвижных рам и зядонноп статическое нажатие полооп 29 контактный прО1.юд ЗО обеспечивает нодъсмная нружииа 31, расноложенная на поягижном основании 32. ToKoiijineMiuiK работает следуиэи1} м образом. rifii нажатии MBUIHHHCTOM кнонки Подня токоп ие1 ник сжатый гюздух попадает в магист,)яль 2 и через золо1-н1гк 4, поршен 5 которого находится в крайнем лоном гюложении, по возду.- э.чроволу 3 нос1уиа :,т в пневматический цгшиндр 1. IIH отом поршень 7 н 1UTOK 8 ио)ОМ01Ца1отся влево. ,Г1оскол11ку опускающая пружина 12 и.геот меш.-цую жесткость, чем нрумшна 1О, то нри paoHbix нлсчах рычага У nei.ieMtuueHne штока 8 В1..1зывя т paci яясоние н{|ужи1И:.1 112 П)и неподвижной .не 10. 13 результате кул1,са 18 перемещается левое крайнее 11О1оже)Ие, ируек)ое упором IJ, 11(1И этом кулисн1,И к,;:мгнь -ij MI жет ис,)еме1паться влево и но п;)е 1ятс1во- вать нодтем.у гюдгмгжных laM 13 пол длпстнцем nt)7nieNt ;oii лрукпиы 3. поло.м 2U тжонриемиика П .-ю.ь. рс. спуска верхних подвяжнмх рам 13 вступа ет п сог р1жосноьеи1и; с ко1гтактн1,1М rtl clиoд ЗО, то (.iaiU. Kopcir.ii,i(-.:a 2- заканчива ется и поршень Г) оол15тнпка 4 исчанлтли- . Так как при такок положенни порш ня 5 сжатый воздух П|10до;1жает ноступать ип NJcUHCTfia.nn 2 через золотник .4 в HHefv Мглг(5чгский nHJUuwp 1, норшень 7 и шток 8 нродол:.-.аь.-1т .-сремешение влево. Нижний конен нпум11.:чего рычага 9 будет ненодрл- жен, а сам pi гчаг будет вращаться вокруг точки Л , растягивая пружину 10, а тягой 14 поворачивать рычаг 15 против часо1 ой стре71ки. Нижние подвижные рамы 11 будут поворачиваться относительно главных валов 16 против часовой стре;жи и, распускаясь; поднимать подвижное основание 32. При подъеме нижних, нодвижшлх рам 11 при постоянной высоте контактного провгца ЗО верхние подвижные ра,гы 13 складывают:;.., чтоприводит к повороту против часовой стрелки коромысла 24 посредстБОм рычага 21 и гяги 22 и к перемещению вправо норшня 5 золотника 4 посредством тяги 23 коромысла 25. вра иа1ои(егося в этот момент вокруг точки б и иггока .20, пока норшень 5 HI перекроет окно воздухопровода ,3. (То.мача сжатого воздуха в . пневматический цплинд 1 1 нрекрашается, и ниж.яие подвижные 11 останавливйются. При понижении контактного н ювода 30 нроисходит перемещение nopi. пя 5 золотника 4 вправо, и воздухопрово. 3 через отверстие 6 золотника 4 соединяется с атмосферой. FVjixon воздуха из ни.линдпа 1 вызывает опускание гюдвняаюго оснор.ания 32 и некоторьш роспуск верхних подвижных рам 13. Норшень 5 золотника 4 будет перемещаться влево и перекроет окно воздухопровода 3, что прек(:1атит Р.ЫХОД сжатого воздуха из цилиндра 1. При повьипении контактного провода ЗО, когда нолоз 20 1и.п;имается ч;.д гюдвнж- Hf.iM основанием 32 гмине задагнюй высоты, IUTOK 2О, пе :юме1цая норшенг.) 5 влево, сое.-динит через золотник 4 воздухопровод 3 и сжатый воздух будет с маг стралыо ociynaь в шитин/ф 1. Нрн этом рычаг 15 и нижние по.цвижгые рамы 11 пудут но- во пчиваться против часгч он стре.лки, а подвижное ocHO «Hiie подниматься. 1одъйм подвиж юг С) осног.чния 32 будет про- должа1ься ло тех no{:i, пока в результате (гор-мрщепия погчиня вправо ( вс.ч. .дствне :;к.чадь1пан1)я верхних Ю1изижн.1х рам 13) окно воздухопровода ,Ч в .чолотннке 4 не 3aKjiO..TCJ. по -;1И Я 5 :.;олотннка 4 выбира1 тся такой, 4T.jobi в среднем диапазоне вы- coTjii полоза 2,.| над .подвижным основанием поршень 5 закрывал окно возлухонровол,а 3. Благодаря этому небольшом заданно; изгч енении BI .соты контг.ктного про- во;.0 30 будут изменять лоложенне только ве1) по,и1нж1и,1е рамы J. 3, а нижние ра- MbJ 11 н основг.аЕие 31 останутся непод- Г.ИЖН IMH. Я онуска; пи токоприемника после нажат11я Maijiинистом кнопки Опустить токоприемник )iii воздух из магистрали 2 нневматического нилиндра 1 выпускается. Норшент 7 н шток 8 переметаются вправо до ynoyja, и пружинга 1О и 12 полностью сжимаются. Еерхние 13 и нижние 11 под- вижн1-.,1е рамы занимают нижнее опущенное положение. .oMy сжатию пружины 12 соответствует neoe.vieujoHne точки а на тяге 17 в крайнее правое положение, при котором воздухопровод 3 соединяется с магистралью 2. Пневматическая система полностью опущенного токоприемника вновь готова к вводутоконриемшжа Б рабочее положение.
