Предлагаемое изобретение относится к области применения средств вычислительной техники к анализу систем автоматического управления статистическими методами.
Известные способы определения весовой функции системы с переменными параметрами основаны на исследовании реакций системы на случайный входной сигнал путем определения множественных функций корреляции.
Описываемый способ отличается от известных тем, что, с целью сокращения времени обработки, в качестве входных возмущений на систему подают последовательность неповторяющихся циклически сдвинутых на целое число тактов двоичных псевдослучайных сигналов, которые получают из сигналов Хаффмена путем суммирования по модулю 2.
Количество неповторяющихся двоичных сигналов при этом составляет:
N - .
Первые т сигналов снимают с отводов сдвиговых регистров, а остальные получают путем суммирования по модулю 2.
Из всей совокупности известных псевдослучайных сигналов свойством циклической суммируемости обладают только сигналы, известные в литературе под названием сигналов Хаффмена. Поэтому одновременное получение всей совокупности сигналов Xi{t), X2(t)...,
XiY(t) без использования схем временной задержки возможно только для этого вида двоичных сигналов.
Применение указанных входных сигналов
позволяет заменить операцию умножения операцией алгебраического суммирования при вычислении функции взаимной корреляции, с целью определения весовой функции динамической системы, т. е. использовать релейную корреляцию. Замена операции умножения операцией алгебраического суммирования возможна благодаря тому, что подаваемые на вход динамической системы псевдослучайные сигналы принимают в каждой реализации всего два
значения амплитуды: или -а.
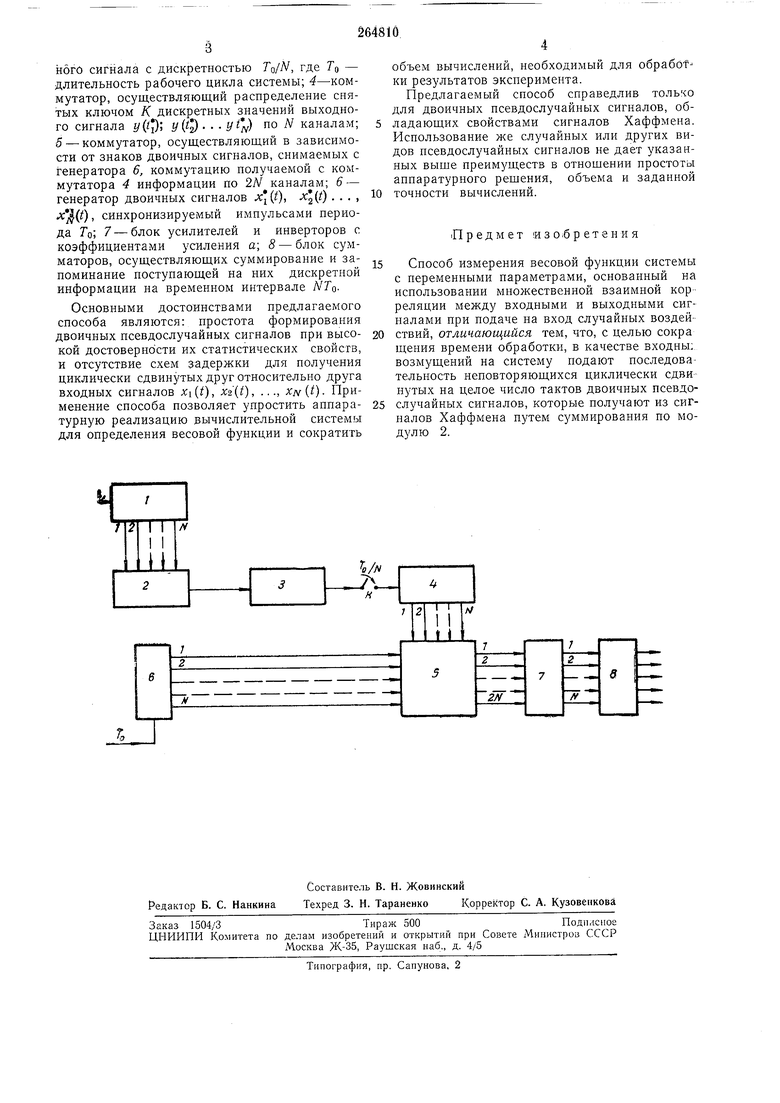
Описываемый способ экспериментального определения весовой функции динамической системы допускает аппаратную реализацию, упрощенный пример которой приведен на чертеже, где приняты следующие обозначения: У - генератор двоичных псевдослучайных сигналов Xi(t), x-2{t) ...,x,(t), синхронизируемый импульсами периода la/N ; 2 - коммутатор, осуществляющий последовательное подключение (безразлично, в каком порядке) сформированных двоичных псевдослучайных сигналов Ai(/), X2(t),..., л: Л (О ко входу исследуемой системы в начале ее рабочего цикла; 3 - исследуемая система с переменными параметраного сигнала с дискретностью Го/Л, где Го - длительность рабочего цикла системы; 4-коммутатор, осуществляющий распределение снятых ключом К дискретных значений выходного сигнала г/О); г/(ф . . . но Л каналам; 5 - коммутатор, осуществляющий в зависимости от знаков двоичных сигналов, снимаемых с генератора 6, коммутацию получаемой с коммутатора 4 информации по 2N каналам; 6 - генератор двоичных сигналов x(t), x(t) . . . , x(t), синхронизируемый импульсами периода Го; 7 - блок усилителей и инверторов с коэффициентами усиления а; 8 - блок сумматоров, осуществляющих суммирование и запоминание поступающей на них дискретной информации на временном интервале NTo.
Основными достоинствами предлагаемого способа являются: простота формирования двоичных псевдослучайных сигналов при высокой достоверности их статистических свойств, и отсутствие схем задержки для получения циклически сдвинутых друг относительно друга входных сигналов Xi(t), X2(t), ..., Xff(t). Применение способа позволяет упростить аппаратурную реализацию вычислительной системы для определения весовой функции и сократить
объем вычислений, необходимый для обрабОт ки результатов эксперимента.
Предлагаемый способ справедлив только для двоичных псевдослучайных сигналов, обладающих свойствами сигналов Хаффмена. Использование же случайных или других видов псевдослучайных сигналов не дает указанных выше преимзществ в отношении простоты аппаратурного решения, объема и заданной точности вычислений.
Предмет ИЗО|бретения
Способ измерения весовой функции системы с переменными параметрами, основанный на использовании множественной взаимной корреляции между входными и выходными сигналами при нодаче на вход случайных воздействий, отличающийся тем, что, с целью сокра щения времени обработки, в качестве входны; возмущений на систему подают последовательность неповторяющихся циклически сдви нутых на целое число тактов двоичных псевдослучайных сигналов, которые получают из сигналов Хаффмена путем суммирования по модулю 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСОВОЙ ФУНКЦИИ ФИЗИЧЕСКОЙ СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 1973 |
|
SU367432A1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ИМПУЛЬСНОЙ РЕАКЦИИ ДИНАМИЧЕСКОГО ЗВЕНА | 1969 |
|
SU240071A1 |
| Система для моделирования широкополосныхСлучАйНыХ ВибРОпРОцЕССОВ | 1978 |
|
SU805325A1 |
| СПОСОБ ДЛЯ ГЕНЕРИРОВАНИЯ ПСЕВДОСЛУЧАЙНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ И СПОСОБ ДЛЯ КОДИРОВАНИЯ ИЛИ ДЕКОДИРОВАНИЯ ПОТОКА ДАННЫХ | 2013 |
|
RU2609098C2 |
| СПОСОБ ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2012 |
|
RU2486683C1 |
| МАЖОРИТАРНЫЙ МОДУЛЬ | 2012 |
|
RU2473954C1 |
| СПОСОБ КОДОВОЙ ЦИКЛОВОЙ СИНХРОНИЗАЦИИ | 2011 |
|
RU2450436C1 |
| Устройство контроля для проведения эргометрических исследований | 1978 |
|
SU768391A1 |
| СПОСОБ ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2007 |
|
RU2353064C1 |
| СПОСОБ КОМПРЕССИИ-ДЕКОМПРЕССИИ ДАННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488960C2 |
