Изобретение относится к области систем автоматического управления. Известны способы определения импульсной реакции динамического звена (весовой функции звена) с постоянными параметрами. Однако известные способы непригодны для звеньев с меняющимися параметрами. Предложенный способ отличается от известных тем, что при нем формируют импульсную псевдослучайную входную последовательность с периодом повторения, кратным наименьшему периоду изменения параметров динамического звена, регистрируют дискретные выборки входного и выходного сигналов в совпадающие моменты времени через целое число периодов изменения обоих сигналов и по числу выборок определяют ряд их взаимных функций автокорреляции. Это обеспечивает увеличение точности определения импульсной реакции динамического звена с периодически меняющимися парамеграми при сокращении времени ее получения. Сущность предлагаемого способа заключается в следующем. сигнал X(t) определяется из уравнения свертки:у(/)г fta(/, e);sr(/-0)rfe,(1) б где ш(, 0) -весовая функция системы; 0 -момент приложения входного сигнала; t -текущее время; Т - верхний предел интегрирования, удовлетворяющий условию; ,. При этом Т„ -величина памяти системы, определяемая как ш( 0) - А |, где Л - некоторое пренебрежимо малое значение весовой функции в момент времени Г„. Для линейных систем с периодически изменяющимися параметрами весовая функция является периодической функцией своих аргументов:ti(/,0) :,(Го,в+9Го), где q - некоторое целое число; 3 ный сигнал X(t) и определяется функция взаимной корреляции между входным и выходным сигналами. Так как установившаяся реакция системы Y(t) на стационарный входной сигнал X(t) является нестационарной, то опре- 5 деляется множественная функция взаимной корреляции. Для этого производят дискретную выборку значений Y(t) и X(t) следующим образом Измеряют значения выходного и входного 10 сигналов в дискретные моменты времени: , (-,...,,X t -}-iqT,+-:,.., vr/ I fM 1 ri yr/ iIcA/ n r -I- 1 ... -|-(л/-i; /,, А f -t-(yv - e-hl. „ ,„ где Г - некоторый фиксированный момент времени. Число д определяется из условия обеспечения попарной независимости членов суммы 20 при нахождении множественной функции взаимной корреляции: 1 «гч R.At, -) - у. ( + ) X25 y(i 4-iaT 4- ) СЗ) А(, -|- t/ о -г ; I и зависит от интервала корреляции внутренних шумов и внещних случайных возмущений, имеющихся в реальной системе. Выборочные значения выходного сигнала системь в соответствии с (1) и (2) определя-,, ются выражением: Л V , Р Д35 У (/ + iqT,) w(l, Q)X( iqT,- 0)9,(4) 040 i//i 1 т из которого следует, что y(t+iqT,) будет периодическои только в том случае, если входНОИ сигнал X(t) имеет период Го или кратное ему значение. г ,л д, С учетом (4) выражение для функции взаимной корреляции (3) перепишется в виде: п ./ . . в) -в) ух (f , ; - I ш f , UJ 2, U + iflJ о WJ X 6 + )©. (5) В равенстве (5) перестановка операций55 суммирования и интегрирования законна в силу производимого способа выборки значений (t t фиксировано). Пусть период Г,,, длительность дискрета А-60 псевдослучайного сигнала X(t) и объем про4В этом случае, осуществив .V выборок с дискретностью дТ, получают: N-qTa N-qT - -N-fit (Nq + 1)Т ьт - ЬТ «i-д-- «2-о. (7 - взаимно простые числа, зависящие от Л и q: k k N.q. заданном Го и минимально допустимые, значениях числа 9 и объема выборки// можно всегда подобрать такие значения Т .а а -. условие (7) будег выполн но. условий (6) и (7) в силу периодичности псевдослучайного сигнала X(t) следует, что: . /j 1 У X(t I iaT Q)X(t + iaT 4-т) : л ® ч о v - RXX + (8) где (т+0) - автокорреляционная функция псевдослучайного сигнала. Из (8) получают следующую запись уравнегКух( ,)( ,) Kxxt ) & (9) . , Автокорреляционная функция псевдослучаиногр сигнала Х(0 аппроксимируется следующей а-налитическои зависимостью: 8() - y- , (Ю) где a - амплитуда сигнала; L число дискрет Af в его периоде Т (из условий (6) L N) Дирака, Hpii. достаточно большом числе L N можно приближенно считать, что: п (Ц) Учитывая (11), при Г :эГ„ и Г Г,() JJ3 (9) получают окончательно: /,(-т)(,т). Итак, определяя функцию взаимной корреляциимежду выходным и входным сигналами системы с нериодически изменяющимися параметрами при воздействии на ее вход псевдослучайного сигнала X(t) со специально подобранным периодом, с точностью до извест„ого постоянного множителя, получают сопрявыше операции, можно одновременно получить п сопряженных весовых функций:
Ш(), Ш(Г2,Т),...., W{t,c)
и, таким образом, полностью определить весовую функцию исследуемой системы.
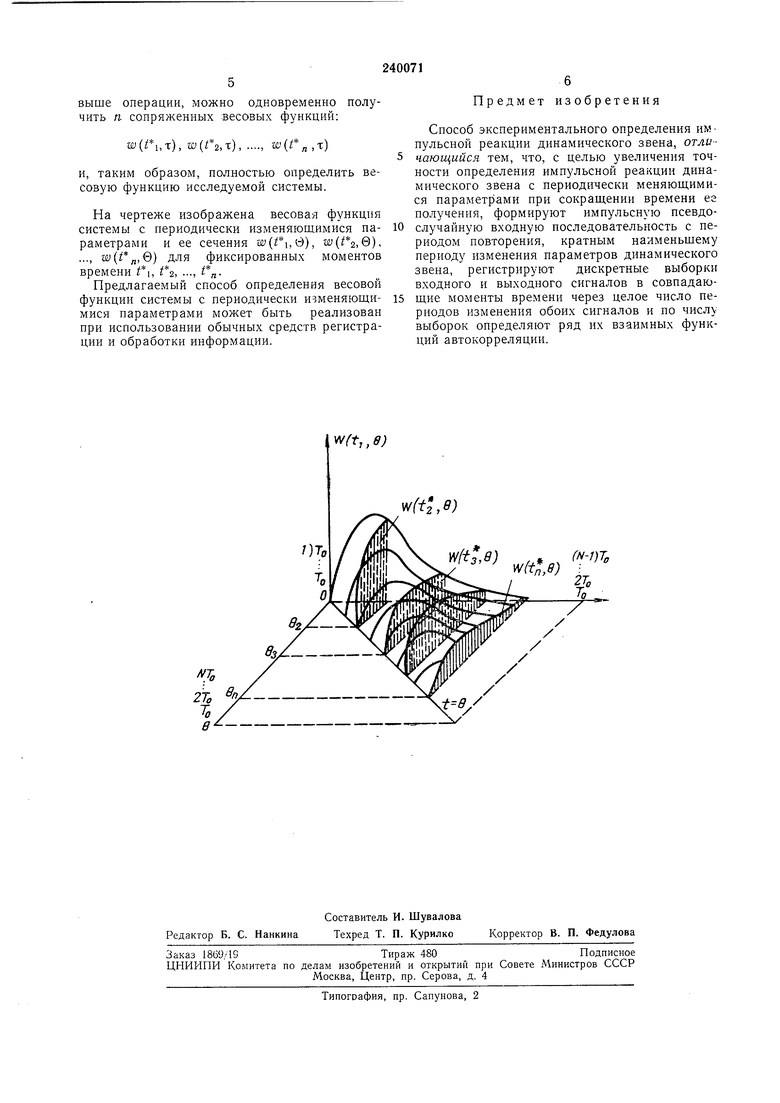
На чертеже изображена весовая функция системы с цериодически изменяющимися параметрами и ее сечения w(,S), w(,Q). ..., ш(,в) для фиксированных моментов времени , , ..., „.
Предлагаемый способ определения весовой функции системы с периодически изменяющимися параметрами может быть реализован при использовании обычных средств регистрации и обработки информации.
Предмет изобретения
Способ экспериментального определения импульсной реакции динамического звена, отличающийся тем, что, с целью увеличения точности определения импульсной реакции динамического звена с периодически меняющимися параметрами при сокращении времени ег получения, формируют импульсную псевдослучайную входную последовательность с периодом повторения, кратным наименьщему периоду изменения параметров динамического звена, регистрируют дискретные выборки входного и выходного сигналов в совпадающие моменты времени через целое число периодов изменения обоих сигналов и но числу выборок определяют ряд их взаимных функций автокорреляции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСОВОЙ ФУНКЦИИ ФИЗИЧЕСКОЙ СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 1973 |
|
SU367432A1 |
| СПОСОБ ИЗЛ1ЕРЕНИЯ ВЕСОВОЙ ФУНКЦИИ СИСТЕМЫ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 1970 |
|
SU264810A1 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| ИЗМЕРЕНИЕ СХОДИМОСТИ АДАПТИВНЫХ ФИЛЬТРОВ | 1996 |
|
RU2180984C2 |
| Устройство для контроля динамических систем | 1979 |
|
SU769497A1 |
| СПОСОБ БЫСТРОЙ УСРЕДНЯЮЩЕЙ КИХ-ФИЛЬТРАЦИИ НА ОСНОВЕ ПРОЦЕССОРА | 2002 |
|
RU2242792C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСВЯЗИ | 1980 |
|
SU1840131A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| Цифровой анализатор спектра | 1985 |
|
SU1256044A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОНАВИГАЦИОННОГО ПАРАМЕТРА СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1986 |
|
RU2040801C1 |
wfr,;
f.
