Изобретение относится к системам автоматики и предназначено для управления объектом с ограничение.м скорости иснолнительного двигателя.
Известна система автоматического управления такого рода, содержащая предварительный усилитель, датчик положения, установленный на оси исполнительного двигате-чя, усилитель моидности и дза узла сравнения. Недостатком этой системы является возможность нревышения скорости вращения исполнительного двигателя при выходе из строя тахогенератора. Кроме того, при управлении некоторыми сложными объектами, например гиростабилизированными нлатформами, ставится задача надежного ограничения скорости вращения исполнительного двигателя беа установки на объекте управления тахогенератора.
Предлагаемая снстема отличается от известной тем, что дополнительно содержит контрольную систему и второй датчик положения, выход которого соединен со входо.м предварительного каскада усилителя. Вход контрольной следящей системы соединен с выходом датчика положения, связанного с осью исполнительного двигателя, а на выходной оси установлен тахогенератор, выходная обмотка которого соединена со входом промежуточного каскада усилителя. Кроме того.
система отличается тем, что к выходу узла сравнения контрольной следящей систе: ы дополнительно подключен блок контроля, выход которого соединен со входом оконечного каскада усилителя. Этим достигается повыщенне надежности ограничения скорости вращения исполнительного двигателя при невозможности размещения на объекте датчика скорости и устранение автоколебаний объекта ирн больщих начальных рассогласования.х, а также предотвращение превыщения допустимой скорости вращения двигателя при выходе из строя тахогенератора.
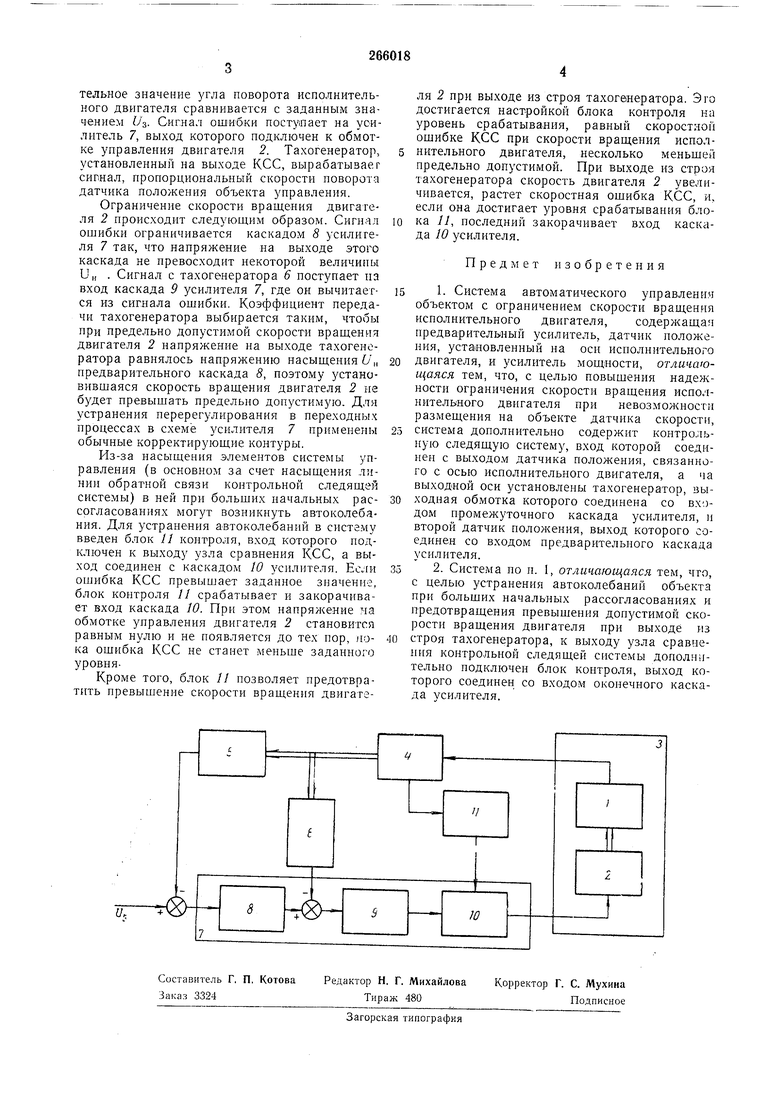
На чертеже показана блок-схема предлагаемой системы.
Система содержит датчик / положения и исполнительный двигатель 2, установленные на объекте 3 управления, контрольную слещящую систему (КСС) 4 с установленными на ней вторым датчиком 5 иоложения и тахогенератором 6, усилитель 7, содержащнй предварительный 8, промежуточный 9 и оконечный 10 каскады. Кроме того, к выходу узла суммирования контрольной следящей системы подключен блок И контроля воздействующий на каскад 10 усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU857924A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU378798A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Устройство для отработки заданногоположения регулирующего органа | 1973 |
|
SU508779A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU338888A1 |
| СЛЕДЯЩИЙ ПРИВОД | 1972 |
|
SU343251A1 |
| СИГНАЛИЗАТОР ДОСТИЖЕНИЯ ЗАДАННОЙ СКОРОСТИ | 2000 |
|
RU2177158C1 |
