1
Изобретение касается систем автоматического управления и может быть использовано для построения высококачественных следящих приводов.
Известен привод с механическим усилителем -мощности, входной и выходной величинами которого являются механические перемещения 1. Однако в таком приводе нет следящей системы управления, обеспечивающей достаточную надежность устройства.
Наиболее близким но технической сущности к данному изобретению является привод, содержащий силовой двигатель, два редуктора, каждый из которых соединен через щестерни червячных передач с двумя входными шестернями первого дифференциала, вал водила которого соединен с объектом регулирования и два исполнительных механизма, связанные с червяками червячных передач 2.
Недостатками такого привода являются: отсутствие схемы управления двумя управляющи.ми двигателями; необходимость применения специального электрического асинхронного двигателя двойного вращения-, скольжение которого определяется суммой скоростей ротора и контротора, которые будут изменяться нри различных нагрузках; отсутствие устройств, обеспечивающих защиту асинхронного двигателя от перегрузок, а червячных передач и редукторов - от поломок.
Целью изобретения является повышение надежности следящего привода.
Это достигается тем, что в предлагаемый привод введеиы второй дифференциал, муфта
предельного момента, два тахогенератора, датчик угла, два реле, источник эталонного сигнала, два сумматора и чувствительный элемент, вход которого связан через датчик угла с объектом регулирования, а выход соединен с первым входом первого сумматора, выход первого сумматора связан с первым входом первого силового механизма, первый выход которого через первый тахогенератор связан с первым входол второго сумматора,
выход второго сумматора соединен с первым входом второго силового механизма, причем вторые входы первого и второго сумматоров связаны с выходами источника эталониого сигнала, входные щестерни второго дифференциала соединены с муфтой предельного момента и силовым двигателем, который связан через второй тахогенератор с первым и вторым реле, первое из которых подключено ко второму входу первого исполнительного
механизма, а второе - ко второму входу второго исполнительного механизма, выходные щестерни второго дифференциала соединены со входами двух редукторов.
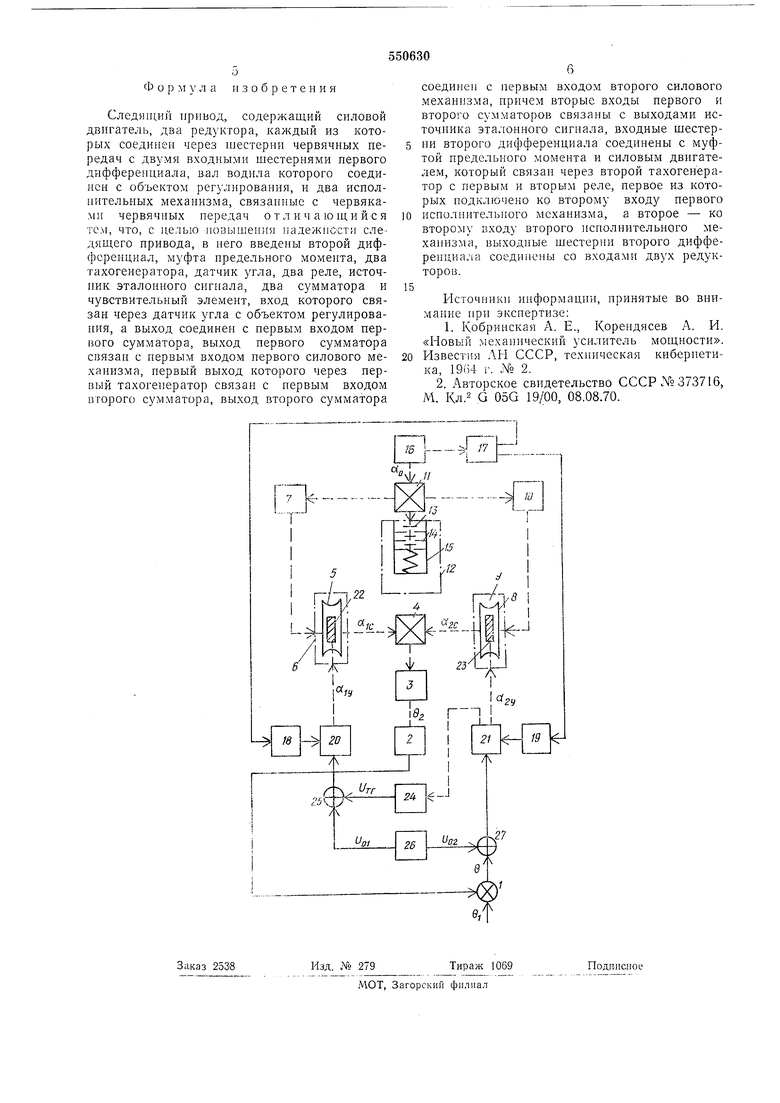
На чертеже показана блок-схема предлагаемого следящего привода.
Следящий привод состоит из чувствительного элемента 1, на один вход которого поступает входная величина в, а второй вход соединен с выходом датчика угла 2, вход которого соединен с объектом регулирования 3. Вход объекта регулирования 3 соединен с выходом первого дифференциала 4, первый вход которого соединен через шестерню 5 первой червячной передачи 6 с выходом первого редуктора 7, а второй - через шестерню 8 второй червячной передачи 9 с выходом второго редуктора 10. Входы редукторов 7, 10 соединены, соответственно, с первым и вторым выходами второго дифференциала II, третий выход которого соединен со входом муфты предельного момента 12, одни подпружиненные диски 13 которой соединены с входным валом второго дифференциала, а другие нодпружиненныедиски 14 - с корпусом i5 муфты. Вход дифференциала II соединен с первым выходом силового двигателя 16, второй выход которого соедииен со входом второго тахогенератора 17, первый выход которого соедииен со входом второго реле 18, а второй выход - со входом первого реле 19.
Выходы реле 18 и 19 соединены, соответственно, с одними из входов первого и второго исполнительных механизмов 20, 21 управляющих каналов. Выход второго исполнительного механизма 20 соединен с червяком 22 первой червячной передачи 6. Один выход первого исполнительного механизма 21 соединен с червяком 23 второй червячной передачи 9, а второй выход - со входом первого тахогенератора 24, выход которого соединен с одним из входов второго сумматора 25, другой вход которого соединен с одним из выходов источника эталонного сигнала 26, а выход - со входом второго иснолнительного механизма 20. Второй выход источника эталонного сигнала 26 соединен с одним из входов первого сумматора 27, другой вход которого соединен с выходом чувствительного элемента 1, а выход - со вторым входом первого исполнительного механизма 21.
Следящий нривод работает следующим образом.
В начале работы включается силовой двигатель 16. Если червяки червячных передач 6, 9 не вращаются, то движеиие от двигателя 16 через второй дифференциал 11 передается к муфте предельного момента 12. Диски 13 прокручиваются относительно дисков 14, так как момент прокручивания меньше, чем моменты на входе редукторов 7, 10 в связи с тем, что червячные передачи 6, 9 заторможепы, объект регулирования 3 неподвижен.
При вращении двигателя 16 вращается тахогенератор 17, по сигналу которого срабатывают реле 18, 19 и вклЕОчают в работу исполнительные механизмы 20, 21.
Если входной сигнал 0i отсутствует, то на вход исполнительного механизма 21 иоступает сигиал Ьог с источника эталонного сигнала 26, а на вход исполнительного механизма 20 - сигнал -Ufn с источника эталонного сигнала 26 и сигнал Ь,,, с тахогенератора 24. Иснолнительные механизмы 20, 21, а
следовательно и червяки 22, 23 вращаются с одинаковыми скоростями а,у , а, . Скорости а:,,. , а,,: входных валов первого дифференциала 4 равны по величине и противоположны но знаку. Теперь путь движению от
двигателя 16 открыт к объекту регулирования 3, но он ио-прежнему неподвижен, так как скорости вращения червяков 22, 23 одинаковы, а следовательно равны но величине и противоположны но знаку скорости ос i, ,
а ,, входных валов дифференциала 4.
При нодаче на вход привода входной величины в за счет появившегося рассогласования 9 между ©1 и 02 (6 в;---82) СИГаПЛ
на входе исполнительного механизма .21
умеиьшается или увеличивается относительно /02- На входе исиолнительиого мехаиизма 20 сигнал увеличивается или уменьшается относительно исходного сигнала (f/oi - f/,,. ) за счет изменения величины UT,. под действием изменения разности сигналов f/oa - в на входе исиолнительного механизма 21.
Скорость а,у уменьшается или увеличивается, а скорость Kii, увеличивается или умеиьшается па одинаковые величины. Скорость объекта регулирования 3 определяется разпостью скоростей входных валов дифференциала 4, а ускорение объекта регулирования 3 определяется суммой ускорений входных валов дифференциала 4.
Предлагаемый следящий нривод с механическим усилителем мощности обладает следующими преимуществами: использование дифференциального способа управления скоростью иагрузки иозволяет получить практически неограниченный предел регулирования скорости; одностороннее вращение редукторов 7, 10, червяков 22, 23, шестерен 5, 8 иозволяет уменьшить влияние люфтов этих элеMeirroB на динамику привода; применение
самотормозящихся червячных передач 6, 9 обеспечивает удержание нагрузки в аварийных режимах и при обесточивании силового двигателя 16; наличие дифференциала 11, муфты предельного момента 12 обеснечивает
защиту двигателя 16 от перегрузок; наличие тахогенератора 17 и реле 18, 19 обеспечивает защиту иснолннтельных механизмов 20, 21 от перегрузок, так как обеспечивает включение их в работу лищь при вращении двигателя 16, а следовательно нри возможности враП1ения шестерен 5, 8; наличие тахогенератора 24 и источника эталонного сигнала 26 позволяет одновременно управлять исполнительными механизмами 20, 21 с одинаковым, но
противоположным изменением скоростей их относительно опорного значения; наличие защиты в виде дифференциала 11 и муфты предельного момента 12 позволяет в качестве силового двигателя 16 использовать практически любой тип двигателя.
Ф о р м у л а изобретения
Следящий привод, содержащий силовой двигатель, два редуктора, каждый из которых соединен через шестерни червячных передач с двумя входными шестернями первого дифференциала, вал водила которого соединен с объектом регулирования, и два исполнительных механизма, связанные с червяками червячиых передач отличающийся тем, что, с целью новышения 1 адежиостя следящего привода, в него введены второй дифференциал, муфта предельного момента, два тахогенератора, датчик угла, два реле, источник эталонного сигнала, два сумматора и чувствительный элемент, вход которого связан через датчик угла с объектом регулирования, а выход соединен с первым входом первого сумматора, выход первого сумматора связан с первым входом первого силового мехаппзма, первый выход которого через первый тахогеиератор связан с первым входом второго сумматора, выход второго сумматора
соединен с первым входом второго силового механизма, причем вторые входы первого и второго сумматоров связаны с выходами источника эта.юнного сигнала, входные шестерпи второго дифференциала соединены с муфтой предельного момента и силовым двигателем, который связан через второй тахогеператор с первым и вторым реле, первое из которых подключено ко второму входу первого
исполнительного механизма, а второе - ко второму входу второго иснолпительного механизма, выходные шестерни второго дифференциала соединены со входами двух редукторов.
Источники информации, принятые во внимание прн экснертизе:
1. Кобринская А. Е., Корендясев А. И. «Новый меха1 ический усилитель мощности. Известия АН СССР, техническая кибернетика, 1964 г. N° 2.
2. Авторское свидетельство СССР Х 373716, М. Кл.2 G 05G 19/00, 08.08.70.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Двухканальная следящая система | 1974 |
|
SU503205A1 |
| Двухдвигательный следящий привод | 1975 |
|
SU742867A1 |
| Устройство для устранения люфта в редукторе | 1974 |
|
SU554532A1 |
| Устройство для изменения характеристики жесткости привода | 1973 |
|
SU660042A1 |
